Область техники
Настоящее изобретение относится к транспортному средству, в частности к сельскохозяйственному транспортному средству, в котором передние и задние колеса могут управляться в соответствии с выбираемыми программами поворота колес.
Уровень техники
Такое транспортное средство известно из патентного документа ЕР 0817741 В1. Это обычное транспортное средство снабжено системой управления поворотом цапф колес с трапецией поворота колес на передней и задней ходовой оси. При движении по прямой цапфы передних или задних колес лежат на одной линии, обозначенной здесь как передняя или задняя ось шасси.
Обычное транспортное средство поддерживает, в частности, программу управления поворотом передних колес, то есть программу управления поворотом колес, при которой поворачиваются только передние колеса, тогда как цапфы задних колес неподвижны на задней оси шасси. При этом полюс (центр) поворота может перемещаться вдоль задней оси шасси. Вторая программа управления поворотом колес, в которой задние колеса могут поворачиваться в противоположном направлении относительно передних колес, создает полюс поворота, который может перемещаться вдоль линии, проходящей между передней и задней осями шасси и которая обеспечивает возможность движения по кривой малого радиуса.
Выбор третьей программы управления поворотом колес, при которой передние и задние колеса поворачиваются в одном и том же направлении, позволяет позиционировать полюс поворота на продолжении оси навесного рабочего органа и тем самым ограничивать поперечные усилия, действующие между транспортным средством и рабочим органом.
Далее, поддерживается программа хода в четыре колеи, при которой при прямолинейном движении все колеса повернуты на один и тот же заданный угол таким образом, что колеи всех четырех колес смещены относительно друг друга. Движение на поворотах возможно в программе хода в четыре колеи путем того, что на передних колесах устанавливается угол поворота, отличный от заданного угла поворота.
Водителю такого обычного транспортного средства требуется большая осторожность и концентрация, чтобы выбрать правильную программу управления поворотом колес, подходящую для мгновенной ситуации использования. Нецелесообразно выбранная программа затрудняет маневрирование транспортного средства, а в том случае, когда к транспортному средству присоединен рабочий орган, выбор неправильной программы может даже привести к повреждению транспортного средства или рабочего органа.
Раскрытие изобретения
Задачей настоящего изобретения является создание транспортного средства, которое, с одной стороны, за счет возможности использования различных программ управления поворотом колес обладает гибкой и точной маневренностью, и с другой стороны, не требует от водителя повышенного внимания.
Решение поставленной задачи достигается посредством того, что, в частности, в сельскохозяйственном транспортном средстве, содержащем управляемые передние и задние колеса и устройство управления поворотом для управления полюсом (центром) поворота колес на основе информации о направлении движения, выполненное с возможностью переключения между различными программами управления поворотом колес, реализующими различные взаимосвязи между информацией о направлении движения и полюсом поворота колес, устройство управления поворотом заменяет программу управления поворотом колес в зависимости от события.
Автоматизированные замены программы управления поворотом колес в соответствии с изобретением связаны, в частности, с движением транспортного средства, то есть в качестве события, которое вызывает замену программы управления поворотом колес, считается, в частности, достижение транспортным средством определенного места.
Согласно одному аспекту изобретения таким местом может быть граница площади поля, например, граница края поля или граница другой площади поля с отличными свойствами. Согласно другому аспекту местом может быть также окружение стационарного или подвижного препятствия, причем в этом окружении во избежание соприкосновения с препятствием или для того, чтобы точно привести транспортное средство на заданное расстояние до препятствия, больше подходит другая программа управления поворотом колес, чем та, что используется за пределами окружения.
Средством для восприятия события может быть камера и/или спутниковый навигационный прибор и/или радиоинтерфейс типа V2V (vehicle-to-vehicle communications - межавтомобильная связь для обмена дорожной информацией).
Камера позволяет, в частности, распознавать переход между площадью поля и краем поля (полосой разворота) или оценивать расстояние до препятствия.
Спутниковый навигационный прибор в зависимости от объема географических данных, которые он использует, может воспринимать различные места, такие как границы между площадью поля и краем поля или между площадями поля с твердым основанием и со слабым основанием.
Переход между твердым и слабым основанием может, например, предприниматься всякий раз, когда транспортное средство съезжает с отмеченной в географических данных навигационного прибора твердой дороги или возвращается на нее; предпочтительно он может также осуществляться при смене между сухими и влажными областями сельскохозяйственной площади, если относящиеся к этому данные содержатся в географических данных.
Подвижным препятствием, в окружении которого используется другая программа управления поворотом колес, чем за его пределами, может быть другое транспортное средство. Радиоинтерфейс типа V2V облегчает распознавание другого транспортного средства, которое находится близко к транспортному средству по изобретению и с которым движение должно быть скоординировано.
Согласно предпочтительному примеру использования, в частности, при переходе от площади поля на край поля, то есть когда транспортное средство, идущее от площади поля, достигает границы с краем поля, устройство управления поворотом переключается на программу управления поворотом с поворотом передних и задних колес в противоположных направлениях. Это обеспечивает возможность поворота в малом пространстве при одновременном снижении до минимума истирания колес, то есть при переходе не будет повреждаться дерн на краю поля. При возврате на площадь поля предпочтительно переключается ранее использовавшаяся программа управления поворотом колес. В зависимости от вида транспортного средства и свойств основания на площади поля это может быть программа управления поворотом передних колес, управления поворотом задних колес, управления поворотом передних и задних колес в одном и том же направлении или программа управления ходом в четыре колеи («собачий ход»).
При переходе от твердого на слабое основание для целей бережного обращения с почвой предпочтительно может быть предусмотрена программа управления ходом в четыре колеи.
Согласно следующему предпочтительному примеру использования может быть предусмотрено, что при приближении ко второму транспортному средству устройство управления поворотом переключается на программу управления поворотом передних и задних колес в одном и том же направлении. Такая программа управления поворотом колес облегчает приближение ко второму транспортному средству при параллельном движении. Поэтому переключение на программу управления поворотом передних и задних колес в одном и том же направлении может ограничиваться случаем, когда другое транспортное средство движется в том же направлении по той же полосе движения, что и снабженное устройством управления транспортное средство, или по соседней полосе движения.
Краткий перечень чертежей
Другие особенности и преимущества изобретения будут ясны из последующего описания примеров выполнения со ссылками на прилагаемые чертежи.
На чертежах:
фиг. 1 схематично изображает на виде сверху транспортное средство в соответствии с изобретением;
фиг. 2 изображает транспортное средство в соответствии с первым примером осуществления изобретения при использовании на поле;
фиг. 3 изображает транспортное средство в соответствии со вторым примером осуществления изобретения при использовании на поле.
Осуществление изобретения
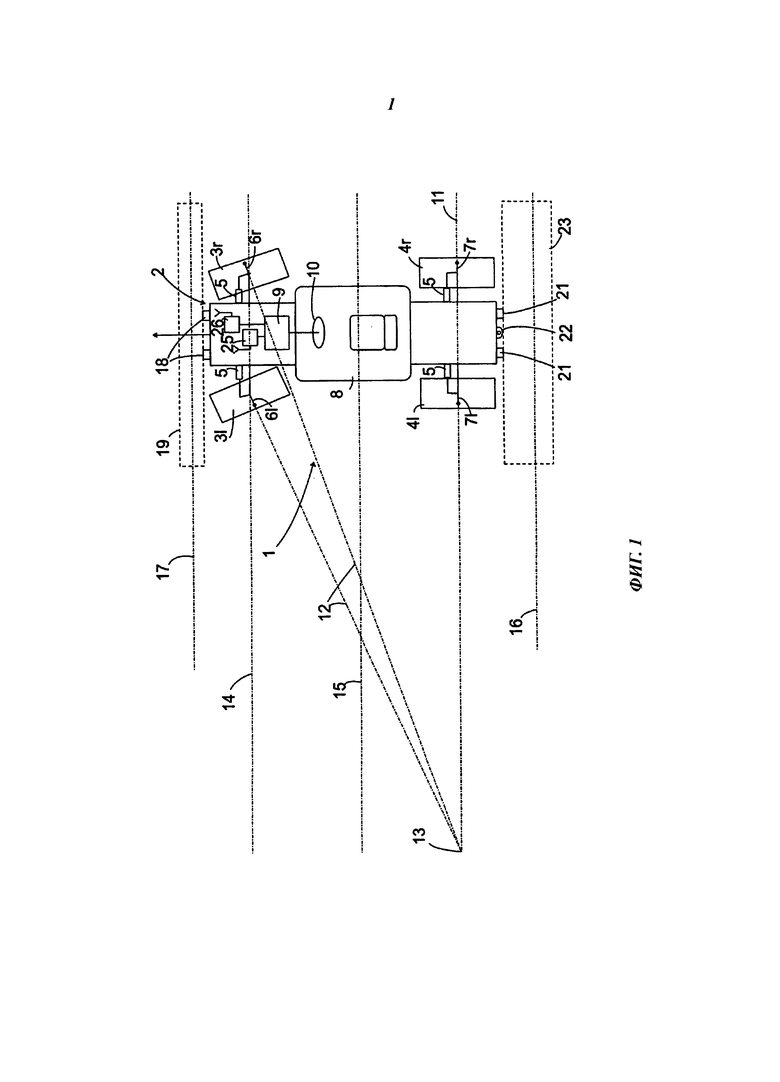
На фиг. 1 очень схематично показано на виде сверху транспортное средство в соответствии с изобретением, в данном случае трактор 1. Трактор 1 имеет шасси 2 с поворачивающимися вокруг вертикальной оси независимо друг от друга передними колесами 3l, 3r и задними колесами 4l, 4r. Передние и задние колеса 3l, 3r, 4l, 4r снабжены поворотными независимо друг от друга цапфами 6l, 6r, 7l, 7r, каждая из которых может поворачиваться собственным исполнительным цилиндром 5. Кабина водителя обозначена позицией 8. Устройство 9 управления поворотом колес определяет угол поворота колес 3l, 3r, 4l, 4r на основе информации о направлении движения, которая здесь выводится из положения рулевого колеса 10 в кабине 8, однако альтернативно может выводиться из положения рычага управления или определяться автопилотом, например, на основе радионавигационных сигналов или сигналов дистанционного управления.
Устройство 9 управления поворотом поддерживает множество программ управления поворотом колес. В данном случае выбрана программа управления поворотом передних колес, то есть задние колеса 4l, 4r являются неповоротными, а их цапфы 7l, 7r проходят вдоль одной задней оси 11 шасси, тогда как передние колеса 3l, 3r в соответствии с информацией о направлении движения поворачиваются вокруг вертикальных осей, и их цапфы 6l, 6r находятся на продолжениях мгновенных осей 12 поворота, которые пересекают заднюю ось 11 шасси в точке полюса 13 поворота. В зависимости от информации о направлении движения или о величине и направлении поворота колес полюс 13 поворота перемещается вдоль задней оси 11 шасси вправо или влево от шасси 2.
В одной из поддерживаемых устройством 9 управления поворотом программе управления поворотом задних колес передние колеса 3l, 3r являются неповоротными, а их цапфы 6l, 8r проходят вдоль одной передней оси 14 шасси, тогда как задние колеса 4l, 4r поворачиваются устройством 9 управления поворотом в соответствии с информацией о направлении движения. В этой программе полюс поворота, в котором пересекаются мгновенные оси поворота колес 3l, 3r, 4l, 4r, перемещается вдоль передней оси 14 шасси.
Далее, поддерживается, по меньшей мере, одна программа управления поворотом колес с противоположным поворотом передних и задних колес 3, 4 в зависимости от информации о направлении движения. Когда угол поворота передних и задних колес 3, 4 в противоположных направлениях одинаков, полюс 13 поворота перемещается вдоль прямой 15, проходящей посредине между передней осью 14 и задней осью 11 шасси.
Далее, поддерживаются различные программы управления поворотом колес, в которых передние и задние колеса 3l, 3r, 4l, 4r поворачиваются в одном направлении. В одной из этих программ все колеса 3l, 3r, 4l, 4r поворачиваются на один и тот же угол. При этом их мгновенные оси поворота параллельны в любой момент времени, и полюс поворота лежит в бесконечности. Эта программа управления поворотом колес особенно подходит для того, чтобы при движении вдоль заданной полосы положение транспортного средства должно выдерживалось точно поперечно полосе движения или колее.
Имеются другие программы управления поворотом колес с поворотом передних и задних колес 3l, 3r, 4l, 4r в одном направлении, в которых угол поворота передних и задних колес различен. Когда угол поворота передних колес 3l, 3r круче угла поворота задних колес 4l, 4r, полюс поворота находится позади задней оси 11 шасси; когда угол поворота колес 4l, 4r круче угла поворота передних колес 3l, 3r, полюс поворота находится перед передней осью 14 шасси. Кривые, вдоль которых в этих двух программах перемещается полюс поворота, представлены на фиг. 1 прямыми 16 или 17. Однако совокупность полюсов поворота, которые реализуются в одной заданной программе управления поворотом колес, не обязательно должна лежать на прямой; в зависимости от того, каким образом в устройстве 9 управления поворотом для данной программы согласованы углы поворота передних и задних колес, полюса поворота могут также лежать на кривых линиях. Расстояние от полюсов поворота до осей 11 и 14 шасси может выбираться произвольно.
Следующие программы управления поворотом колес образованы комбинацией описанных выше программ с ходом в четыре колеи. Тогда как при обычном движении по прямой цапфы передних колес 3l, 3r или задних колес 4l, 4r лежат на одной линии, то есть на передней оси 14 или на задней оси 11 шасси, при ходе в четыре колеи во время движения по прямой все колеса повернуты на одинаковый угол в одном направлении относительно своей оси шасси, при этом угол поворота хода в четыре колеи выбирается таким, что колеи всех колес смещены поперечно относительно друг друга. Криволинейное движение в четыре колеи возможно при управлении поворотом передних колес, при управлении поворотом задних колес, с поворотом передних и задних колес 3l, 3r, 4l, 4r в одном или противоположных направлениях.
Шасси 2 снабжено на своем переднем конце соединительным устройством 18, на котором могут устанавливаться различные типы сменных аппаратов 19, например, косилочный брус. Соответствующим образом на заднем конце шасси 2 предусмотрены соединительные устройства 21, 22 для рабочих органов 23 или для прицепа. В частности, орудия для обработки почвы, например, борона, монтируются сзади на тракторе 1 с помощью соединительного устройства 21. В зависимости от вида и положения навески рабочих органов 19 или 23 на транспортном средстве для полевых работ могут быть целесообразны различные программы управления поворотом колес. Для рабочего органа 19 передней навески подходит программа управления поворотом задних колес или программа с поворотом всех колес 3l, 3r, 4l, 4r в одном направлении, при которой полюса поворота лежат перед передней осью 14 шасси, как это показано прямой 17. За счет того, что прямая 1 полюсов поворота проходит через рабочий орган 19 или находится перед ним, при криволинейном движении рабочий орган 19 не переходит на внутреннюю сторону кривой. При этом устраняется риск того, что, когда нужно объехать препятствие близко к нему, рабочий орган повернется в сторону препятствия и столкнется с ним.
Когда почвообрабатывающий рабочий орган задней навески, такой как рабочий орган 23, при криволинейном движении поворачивается в сторону, между рабочим органом 23 и трактором создаются значительные поперечные усилия, которые могут приводить к повреждениям. Такие поперечные усилия могут ограничиваться или устраняться за счет использования программы управления поворотом передних колес, в которой полюса поворота образуют кривую, проходящую позади задней оси 11 шасси, предпочтительно через рабочий орган 23, - в показанном случае прямую 16.
Устройство 9 управления поворотом получает информацию, существенную для выбора программы управления поворотом колес, от навигационного прибора 25 и/или от радиоинтерфейса 26 типа V2V. Навигационный прибор 25 известным образом вычисляет географическое положение трактора 1 на основе спутниковых радиосигналов и на основе вычисленного положения из бортового банка данных определяет данные окружения, в которых трактор 1 находится в данный момент. Этот банк данных может содержать, в частности, данные о положении и форме подлежащих обработке сельскохозяйственных площадей, об их свойствах почвы, их топографии и т.д.
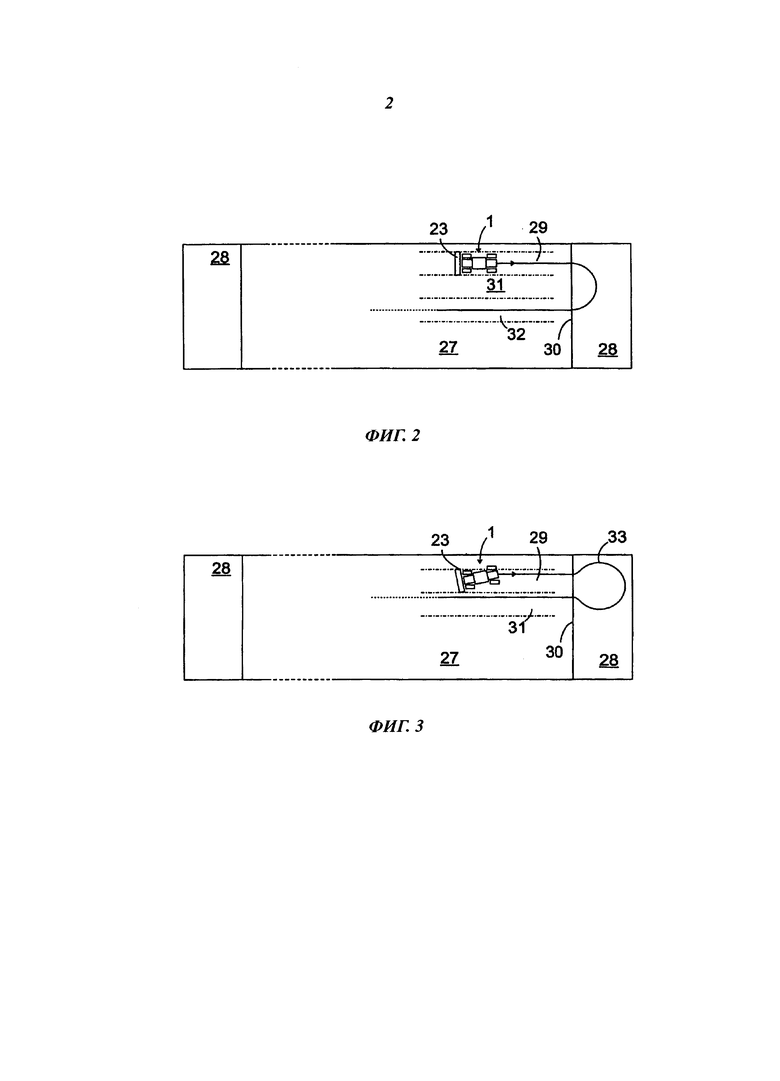
Применительно к фиг. 2, на которой трактор 1 схематично показан на виде сверху при использовании на поле, навигационный прибор 25 предоставляет устройству 9 управления поворотом, в частности, заключение о том, находится ли трактор 1 на обрабатываемой площади 27 поля или на краю 28 поля (полосе разворота) рядом с площадью 27. Когда трактор 1 находится на площади 27 поля, например, на прямолинейной полосе 29 движения, в любом случае требуется небольшая поперечная корректировка положения трактора 1 относительно направления движения, однако не требуется крутых изменений направления. Поэтому может быть выбрана, например, программа управления поворотом передних колес или, с учетом рабочего органа 23 задней навески, такая программа управления поворотом колес, которая реализует прямую 17 полюсов поворота, проходящую за трактором 1 через рабочий орган 23.
Когда трактор 1 подошел к границе 30 края 28 поля, навигационный прибор 35 посылает сообщение об этом на устройство 9 управления поворотом. Для обеспечения возможности поворота в малом пространстве устройство 9 управления поворотом переключается на программу управления поворотом колес с противоположным поворотом передних и задних колес и одновременно управляет подъемом рабочего органа 23 в положение без контакта с почвой. После проезда по краю 28 поля навигационный прибор 25 сигнализирует о новом достижении границы 30, и устройство 9 управления поворотом переключается обратно на программу управления поворотом колес, используемую для полосы 29 движения, и снова опускает рабочий орган 23.
Хотя противоположный поворот передних и задних колес уже позволяет совершить поворот в пределах узкого круга, радиус такого круга поворота обычно значительно больше ширины рабочего органа 23. Между полосой 29 движения и полосой 32 движения по окончании поворота на краю поля лежит, по меньшей мере, одна полоса 31, которая должна обрабатываться за второй проход. Без маневров на краю 28 поля, вызывающих большую нагрузку на почву, невозможно осуществить последовательный проход на площади 27 поля по непосредственно смежным полосам движения, то есть последовательно по полосам 29 и 31 движения.
В примере использования по фиг. 3 трактор 1 движется ходом в четыре колеи, приближаясь на площади 27 поля от полосы 29 движения к границе 30. Продольное направление шасси 2 отклонено от направления полосы 29 движения, здесь в левую сторону. В данном случае программа управления поворотом колес может использоваться на всей площади 27 поля от одного края 28 до другого. Однако возможно также, что в центральной области площади поля применяется программа управления поворотом колес, при которой задние колеса 4l, 4r следуют по тем же колеям, что и передние колеса 3l, 3r, а навигационный прибор 25 на заданном расстоянии от границы 30 посылает на устройство 9 управления поворотом сообщение, которое побуждает его переменить эту программу на программу хода в четыре колеи.
Сообщение устройству 9 управления поворотом, указывающее на приближение к границе 30, вызывает вначале поворот всех колес с их ориентацией параллельно шасси 2. При этом направление движения вновь становится совпадающим с продольным направлением шасси, и трактор 1 отклоняется влево от направления полосы 29 движения. Затем устройство 9 управления поворотом вводит программу управления поворотом колес с поворотом колес 3l, 3r и 4l, 4r в противоположных направлениях для проезда по Ω-образной кривой 33 малого радиуса. Когда трактор от края 28 поля вновь достигает границы 30, описанные переключения производятся в обратном порядке, так что на примыкающей полосе 31 движения вновь включается ход в четыре колеи. Полоса 31 движения расположена непосредственно рядом с ранее пройденной полосой 29; между полосами не остается необработанной площади без необходимости повторных маневров на краю 28 поля.
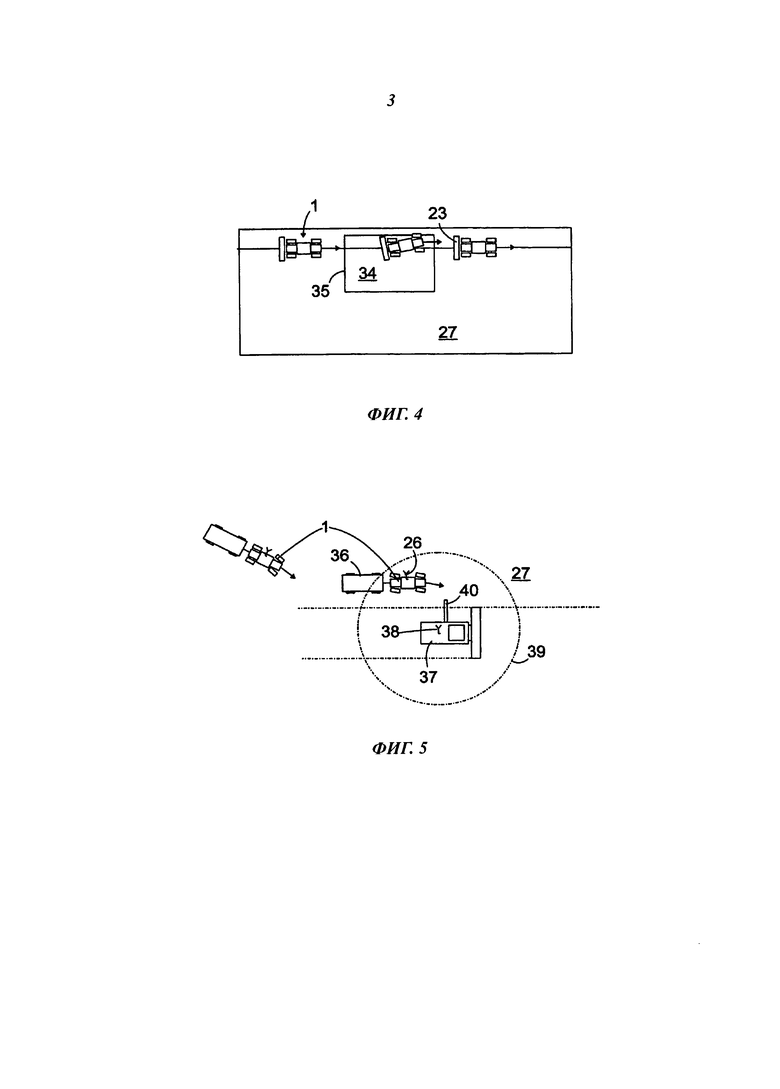
На фиг. 4 позицией 34 обозначен участок поля со свойствами, отличными от остального поля, - например, ложбина, в которой почва более сырая и податливая, чем на остальной площади 27 поля. Когда навигационный прибор 25 сигнализирует устройству 9 управления поворотом о достижении границы 35 этого участка 34 поля, устройство 9 управления поворотом реагирует путем кратковременного проезда по кривой, чтобы ориентировать шасси 2 наклонно к прежнему направлению движения, при этом без бокового перемещения рабочего органа 23, а затем переключает программу на ход в четыре колеи, чтобы двигаться дальше с сохранением первоначального направления движения, но с косой ориентацией шасси 2 относительно направления движения, чтобы колеи колес 3, 4 были смещены относительно друг друга, и нагрузка на почву от веса трактора 1 на участке 32 поля была распределена на как можно большую площадь. При выезде из участка 34 поля производится обратное изменение.
Противоположным образом возможно также использование, при котором в целях бережного обращения с почвой трактор 1 проходит ходом в четыре колеи преимущественную часть площади поля, однако на поле имеется возвышенный участок, для преодоления которого, по меньшей мере, при движении вверх необходима перемена программы управления поворотом колес на программу, при которой задние колеса 4l, 4r следуют по колеям передних колес 3l, 3r, так что на предварительно уплотненном передними колесами основании они могут развивать более высокое тяговое усилие. Эта перемена может также автоматически инициироваться при достижении границы у основания возвышенного участка на основе сообщения навигационного прибора 25, а на вершине возвышенного участка производится возвращение к прежней программе.
На фиг. 5 показана другая ситуация использования, при которой трактор 1 с присоединенным к его соединительному устройству 22 прицепом 36 движется к площади 27 поля, чтобы произвести разгрузку работающего на поле зерноуборочного комбайна 37. Комбайн 37 оснащен радиоинтерфейсом 38 типа V2V, который совместим с радиоинтерфейсом 26 трактора 1. На основе предоставляемой навигационным прибором 25 информации о собственном положении и полученной через радиоинтерфейсы 26, 38 информации о положении комбайна 37 устройство 9 управления поворотом определяет, на какой стороне границы 40 ближней области 39 комбайна 37 находится трактор 1. Альтернативно такое заключение может быть сделано без привлечения данных положения, на основе интенсивности принимаемых через радиоинтерфейс 26 радиосигналов или на основе изображений камеры, которая установлена на борту трактора 1 или комбайна 37 и отслеживает соответствующую ближнюю область. За пределами ближней области 39 устройство 9 управления поворотом использует, как это показано на фиг. 5, программу управления поворотом передних колес или программу управления с поворотом передних и задних колес в одном направлении, при которой полюс поворота лежит позади задней оси 11 трактора 1, так что при необходимости может выполняться движение по крутым кривым и возможны крутые изменения направления. При входе в ближнюю область 39 устройство 9 управления поворотом переключается на программу управления поворотом колес с одинаковым углом поворота всех колес 3l, 3r, 4l, 4r, чтобы обеспечить возможность приближения к комбайну 37 и снизить до минимума тенденцию прицепа 36 к заносу при изменении направления движения трактора 1. При этом удается позиционировать прицеп под разгрузочной трубой 41 комбайна 37 таким образом, что перегружаемая убранная масса попадает в точно заданном месте на грузовую поверхность прицепа 36. Когда по окончании процесса перегрузки трактор снова покидает ближнюю область 39, устройство 9 управления поворотом переключается обратно на использовавшуюся до этого программу управления поворотом.
Для того чтобы снизить вероятность взаимных помех при случайном сближении трактора 1 и комбайна 37, может быть предусмотрено, что переключение программы управления поворотом не производится автоматически при каждом входе трактора 1 в ближнюю область 39 или выходе из нее. Вместо этого при входе в ближнюю область 39 сравниваются также направления движения трактора 1 и комбайна 37, и переключение производится только тогда, когда эти направления совпадают настолько, что может достигаться параллельное движение трактора 1 без необходимости промежуточных выходов из ближней области 39.
Перечень условных обозначений
1 Трактор
2 Шасси
3l, 3r Переднее колесо
4l, 4r Заднее колесо
5 Исполнительный цилиндр
6l, 6r Цапфа оси
7l, 7r Цапфа оси
8 Кабина водителя
9 Устройство управления поворотом
10 Рулевое колесо
11 Задняя ось шасси
12 Мгновенная ось поворота
13 Полюс поворота
14 Ось
15 Прямая полюсов поворота
16 Прямая полюсов поворота
17 Прямая полюсов поворота
18 Соединительное устройство
19 Рабочий орган
21 Соединительное устройство
22 Соединительное устройство
23 Рабочий орган
25 Навигационный прибор
26 Радиоинтерфейс
27 Площадь поля
28 Край поля (полоса разворота)
29 Полоса движения
30 Граница
31 Полоса движения
32 Полоса движения
33 Кривая
34 Участок поля
36 Прицеп
37 Зерноуборочный комбайн
38 Радиоинтерфейс
39 Ближняя область
40 Граница
41 Разгрузочная труба
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОРТАТИВНОЕ ЭЛЕКТРОННОЕ УСТРОЙСТВО | 2012 |
|
RU2530306C2 |
| СЕЛЬСКОХОЗЯЙСТВЕННОЕ ТРАНСПОРТНОЕ СРЕДСТВО С АВТОМАТИЧЕСКИМ РУЛЕВЫМ УПРАВЛЕНИЕМ И СПОСОБ УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2006 |
|
RU2386234C2 |
| АВТОНОМНОЕ ТРАНСПОРТНОЕ СРЕДСТВО, ТАКОЕ КАК АВТОМАТИЧЕСКИ УПРАВЛЯЕМОЕ ТРАНСПОРТНОЕ СРЕДСТВО ИЛИ АВТОНОМНЫЙ МОБИЛЬНЫЙ РОБОТ | 2019 |
|
RU2779749C1 |
| ПРИВОДНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2421354C2 |
| ЭЛЕКТРИЧЕСКОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2018 |
|
RU2706766C1 |
| ГРУЗОВОЕ АВТОМОБИЛЬНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2018 |
|
RU2754711C2 |
| ГИДРАВЛИЧЕСКИЙ ПЛУГ, ПРИВОДИМЫЙ В ДВИЖЕНИЕ ТОЛКАЮЩИМ УСИЛИЕМ АВТОТРАНСПОРТНОГО ТЯГАЧА | 2012 |
|
RU2555155C2 |
| АВТОМАТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ПОСАДКИ КАРТОФЕЛЯ | 2024 |
|
RU2821725C1 |
| АГРОКОМПЛЕКС | 2010 |
|
RU2518234C2 |
| Транспортное средство с автоматической системой рулевого управления | 1979 |
|
SU854296A1 |
Предложено сельскохозяйственное транспортное средство (1), содержащее управляемые передние и задние колеса (3l, 3r, 4l, 4r) и устройство (9) управления поворотом для управления полюсом (13) поворота колес (3l, 3r, 4l, 4r) на основе информации о направлении движения. Устройство управления поворотом выполнено с возможностью переключения между различными программами управления поворотом колес, реализующими различные взаимосвязи между информацией о направлении движения и полюсом (13) поворота колес. Устройство (9) управления поворотом выполнено с возможностью замены программы управления поворотом колес в зависимости от события, при этом событием, которое вызывает замену программы управления поворотом колес, является достижение места, представляющего собой границу площади поля. Достигается создание транспортного средства, которое, с одной стороны, за счет возможности использования различных программ управления поворотом колес обладает гибкой и точной маневренностью и, с другой стороны, не требует от водителя повышенного внимания. 7 з.п. ф-лы, 5 ил.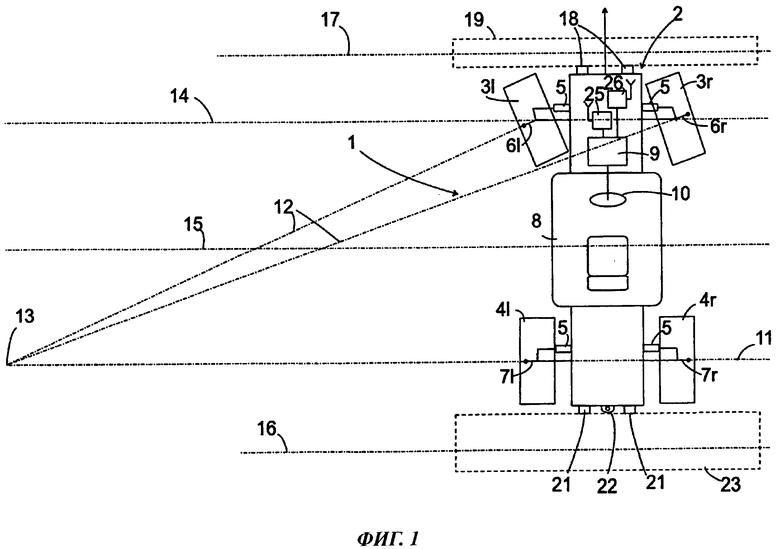
1. Сельскохозяйственное транспортное средство (1), содержащее управляемые передние и задние колеса (3l, 3r, 4l, 4r) и устройство (9) управления поворотом для управления полюсом (13) поворота колес (3l, 3r, 4l, 4r) на основе информации о направлении движения, выполненное с возможностью переключения между различными программами управления поворотом колес, реализующими различные взаимосвязи между информацией о направлении движения и полюсом (13) поворота колес, отличающееся тем, что устройство (9) управления поворотом выполнено с возможностью замены программы управления поворотом колес в зависимости от события, при этом событием, которое вызывает замену программы управления поворотом колес, является достижение места, представляющего собой границу (30, 35) площади (27, 34) поля.
2. Транспортное средство по п. 1, отличающееся тем, что программы управления поворотом колес охватывают по меньшей мере две программы, выбранные из программ управления поворотом передних колес, управления поворотом задних колес, управления поворотом передних и задних колес в одном и том же направлении, в частности при ходе в четыре колеи, и управления поворотом всех колес с поворотом передних и задних колес в противоположных направлениях.
3. Транспортное средство по п. 1, отличающееся тем, что место является окружением (39) стационарного или подвижного препятствия (37).
4. Транспортное средство по п. 1, отличающееся тем, что в качестве средства для восприятия события оно содержит камеру, и/или спутниковый навигационный прибор (25), и/или V2V-радиоинтерфейс (26) межавтомобильной связи.
5. Транспортное средство по любому из пп. 1-4, отличающееся тем, что устройство (9) управления поворотом выполнено с возможностью при переходе от площади (27) поля на край (28) поля переключаться на управление поворотом всех колес с поворотом передних и задних колес (3l, 3r, 4l, 4r) в противоположных направлениях.
6. Транспортное средство по любому из пп. 1-4, отличающееся тем, что устройство (9) управления поворотом выполнено с возможностью при переходе с твердого на слабое основание (34) переключаться на ход в четыре колеи.
7. Транспортное средство по любому из пп. 1-4, отличающееся тем, что устройство (9) управления поворотом выполнено с возможностью при достижении окружения (39) второго транспортного средства (37) переключаться на управление поворотом всех колес с поворотом передних и задних колес (3l, 3r, 4l, 4r) в одном и том же направлении.
8. Транспортное средство по п. 7, отличающееся тем, что устройство (9) управления поворотом выполнено с возможностью переключения на управление поворотом всех колес в одном и том же направлении только тогда, когда другое транспортное средство (37) движется по той же полосе движения, что и транспортное средство (1), или по соседней полосе движения в том же направлении.
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РУЛЕВОГО УПРАВЛЕНИЯ | 2005 |
|
RU2384449C2 |

