ход которого подключен к перрому входу третьего блока сравнения второй вход которого соединен с вторыми вxo,aми первого и второго блоков сра нения, входом первого коммутатора и с блоком памяти максимальных и постоянных величин, первый выход третьего блока , сравнения соединен с уп равляющим входом третьего коммутатора, вход которого соединен также с выходом седьмого вычислительного бло ка, а второй выход третьего блока сравнения подключен к управляющему входу восьмого вычислительного блока , выход которого соединен с входом четвертого вычислителя модуля, выход четвертого вычислителя модуля соединей с первым входом четвертого блока сравнения,, его второй вход соединен с выходом пятого вычислителя модуля, вход которого подключен к вых ду блока вычитания, входы блока вычитания связаны с задатчиком пути и выходом блока преобразования и запо16 минания текуи ей информации, первый выход четвертого блока сравнения соединен с входом блока формирования сигнала управления, а второй его выход подключен к управляющему входу четвертого коммутатора, вход которого соединен с выходом девятого вычислительного блока, выходы всех коммутаторов, регулятора скорости и блока управления подключены к входам блока формирования сигнала управления, входы регулятора скорости, блока управления и блока формирования сигнала управления подсоединены к таймеРУ другие входы регулятора скорости соединены с блоками памяти максимальных и постоянных величин и преобразования и запоминания теку1чей информации, а вход блока управления подключен к выходу блока вычитания, выход блока формирования сигнала управления соединен со входом цифро-аналогового преобразователя,выход которого соединен с другим входом регулятора тока.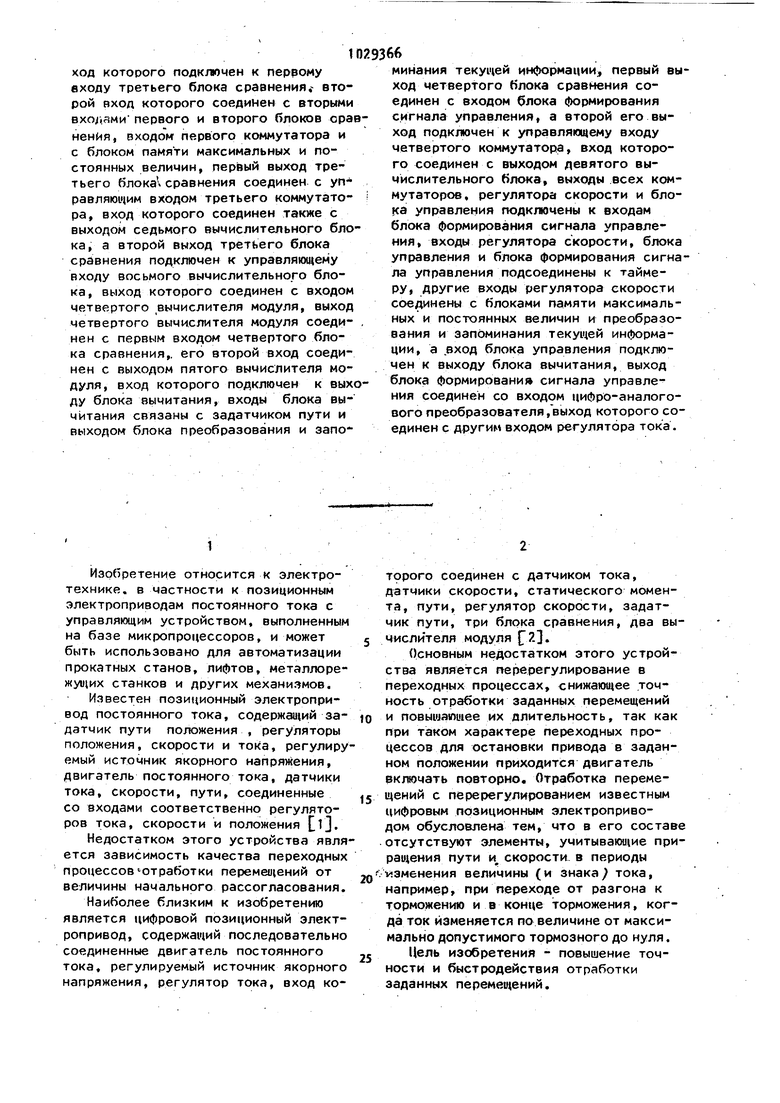
| название | год | авторы | номер документа |
|---|---|---|---|
| Система позиционного управления электроприводом | 1987 |
|
SU1509826A1 |
| Регулируемый электропривод переменного тока | 1987 |
|
SU1494193A1 |
| Модуль для программного управления электроприводом | 1987 |
|
SU1509832A1 |
| Электропривод постоянного тока | 1976 |
|
SU657554A1 |
| Регулятор | 1975 |
|
SU714349A1 |
| Электропривод постоянного тока | 1983 |
|
SU1259458A1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086536A1 |
| Устройство для программного управления | 1980 |
|
SU883872A1 |
| Асинхронный электропривод | 1989 |
|
SU1617611A1 |

ЦИФРОВОЙ ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД, содержащий последователь.но соединенные двигатель постоянного тока, регулируемый источник якорного напряжения, регулятор тока, вход которого соединен с датчиком тока, дптчи: и скорости, статического момента, пути, регулятор скорости, задатмик пути, три блока сравнения, два вычислителя модуля, цифроаналоговый преобразователь, отличающийся тем, что, с целью повышения точности и быстродействия отработки заданных перемещений, в него дополнительно введены три вычислителя модуля, один блок сравнения, девять вычислительных блоков, блок формирования сигнала управления, четыре коммутатора, блок управления, таймер, блок преобразования и запоминания текущей информации, блок памяти максимальных и постоянных величин, блок вычитания, причем выходы датчиков тока, скорости, статического момента и пути подключены ко входам блока преобразования и запоминания текущей информации, управляющий вход которого соединен с таймером, а выход - с первыми входами девяти вычислительных блоков, вторые входы которых подкгвочены к блоку памяти максимальных и постоянных величин, третьи входы первого, третьего и пятого вычислительных блоков соединены с задатчиком пути, а- управляющий вход первого вычислительного блока подключен к блоку управления, выход первого вычислительного блока соединен с входами первого вычислителя модуля, первого коммутатора и третьим входом второго вычислительного блока, выход которого подключен к вхо 3 ду первого коммутатора, выход первого вычислителя модуля соединен с первым входом первого блока сравнения, первый выход которого подключен к управляющему входу первого коммутатора, а второй выход соединен с управляюа « щим входом третьего вычислительного блока, выход третьего вычислительного блока соединен с входом второго коммутатора и третьим входом четвертого 1C вычислительного блока, выход которосо го соединен с входами второго комСАЗ мутатора и второго вычислителя моду05 ля, выход второго вычислителя модуля соединен с первым входом второго блосл ка сравнения, первый выход которого подключен к управляющему входу второго коммутатора, а второй выход соединен с управляющим-входом пятого вычис лительного блока, выход которого подключен к входу третьего коммутатора, третьим входам шестого и седьмого вычислительных блоков, выход шестого вычислительного блока соединен с входом третьего вычислителя модуля, вы
Изобретение относится к электротехнике, в частности к позиционным электроприводам постоянного тока с управляющим устройством, выполненным на базе микропроцессоров, и может быть использовано для автоматизации прокатных станов, лифтов, металлорежуи их станков и других механизмов.
Известен позиционный электропривод постоянного тока, содержаи ий задатчик пути положения , регуляторы положения, скорости и тока, регулируемый источник якорного напряжения, двигатель постоянного тока, датчики тока, скорости, пути, соединенные со входами соответственно регуляторов тока, скорости и положения Cv.
Недостатком этого устройства является зависимость качества переходных процессов отработки перемеи1ений от величины начального рассогласования.
Наиболее близким к изобретению является цифровой позиционный электропривод, содержащий последовательно соединенные двигатель постоянного тока, регулируемый источник якорного напряжения, регулятор тока, вход ко2
торого соединен с датчиком тока, датчики скорости, статического момента, пути, регулятор скорости, задатчик пути, три блока сравнения, два выЧислителя модуля f -.
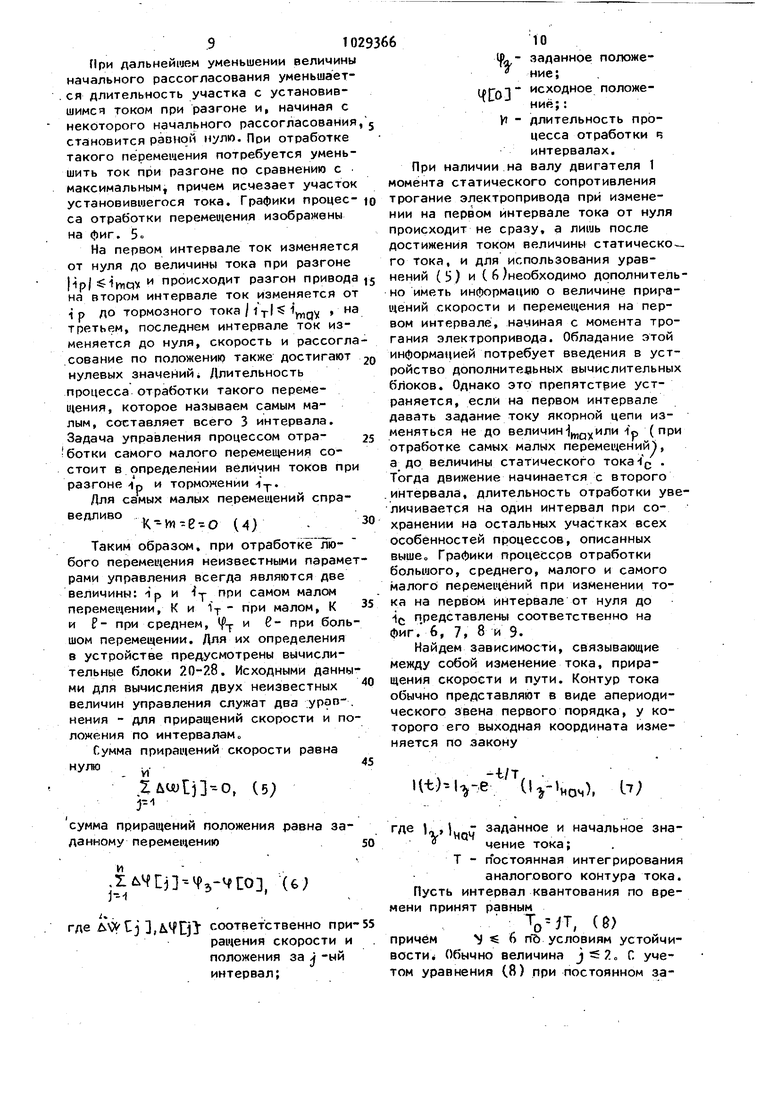
Основным недостатком этого устройства является перерегулирование в переходных процессах, снижающее точность отработки заданных перемещений и повышающее их длительность, так как при таком характере переходных процессов для остановки привода в заданном положении приходится двигатель включать повторно. Отработка перемещений с перерегулированием известным цифровым позиционным электроприводом обусловлена тем, что в его составе отсутствуют элементы, учитываюи1ие приращения пути и скорости, в периоды f.Ч-зменения величины (и знака тока, например, при переходе от разгона к торможению ив конце торможения, когда ток изменяется по величине от максимально допустимого тормозного до нуля.
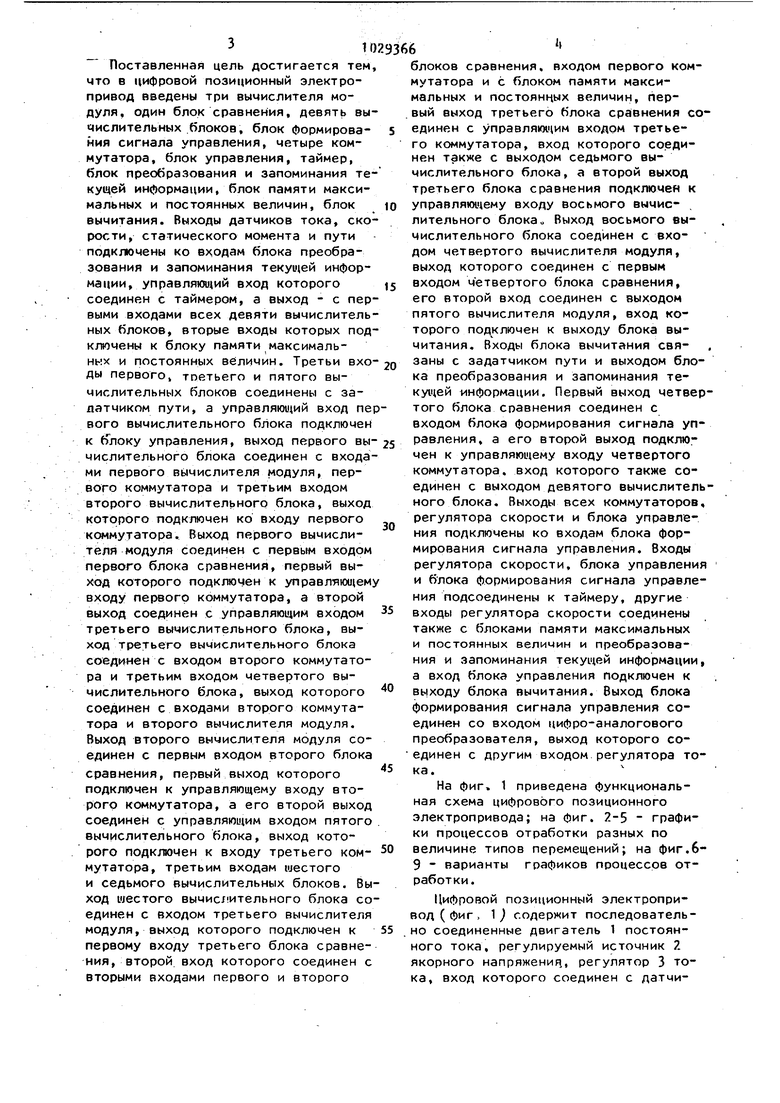
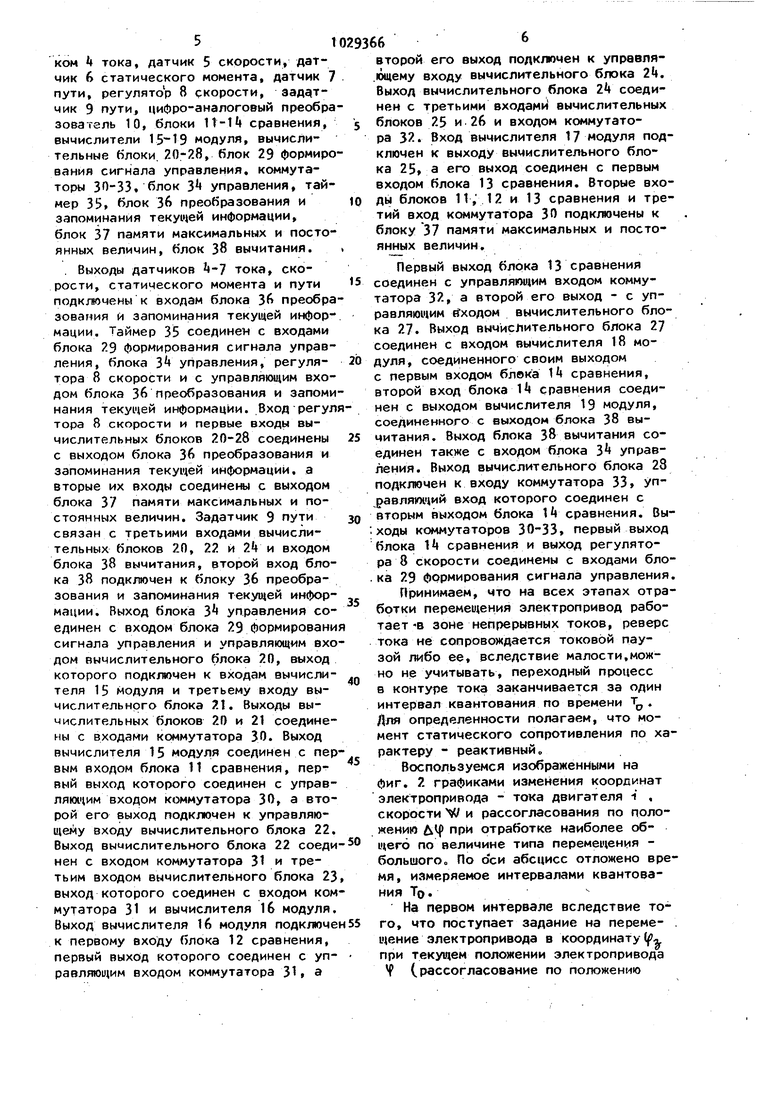
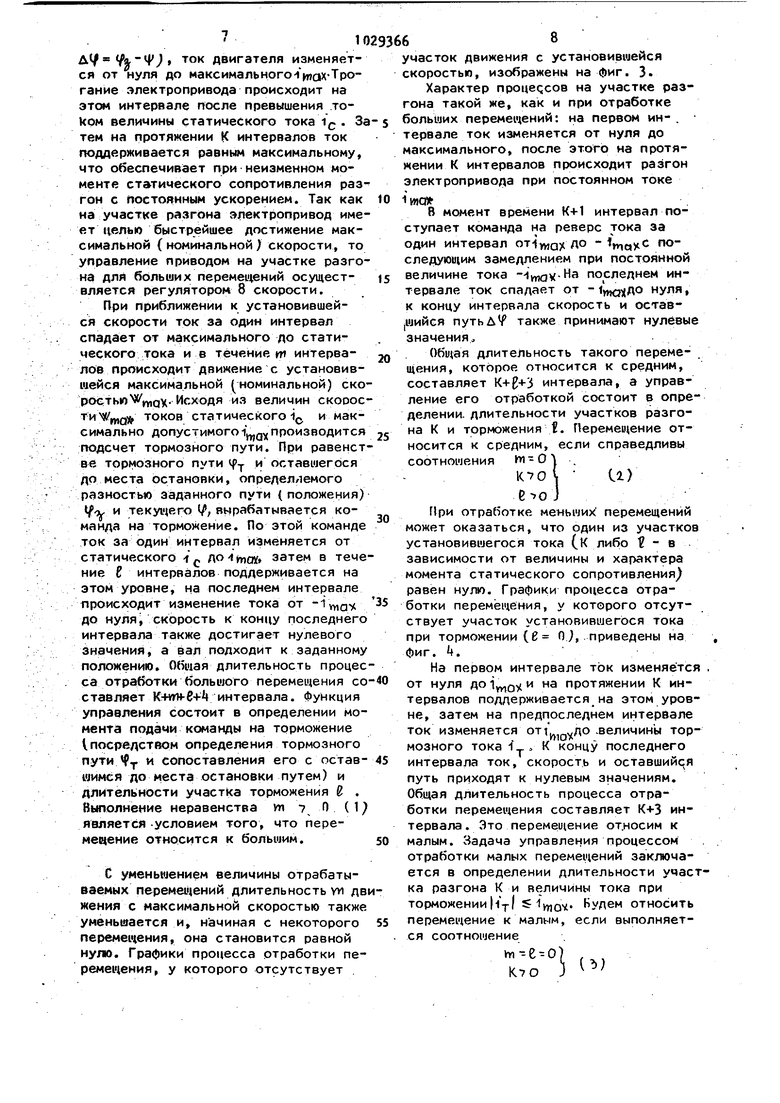
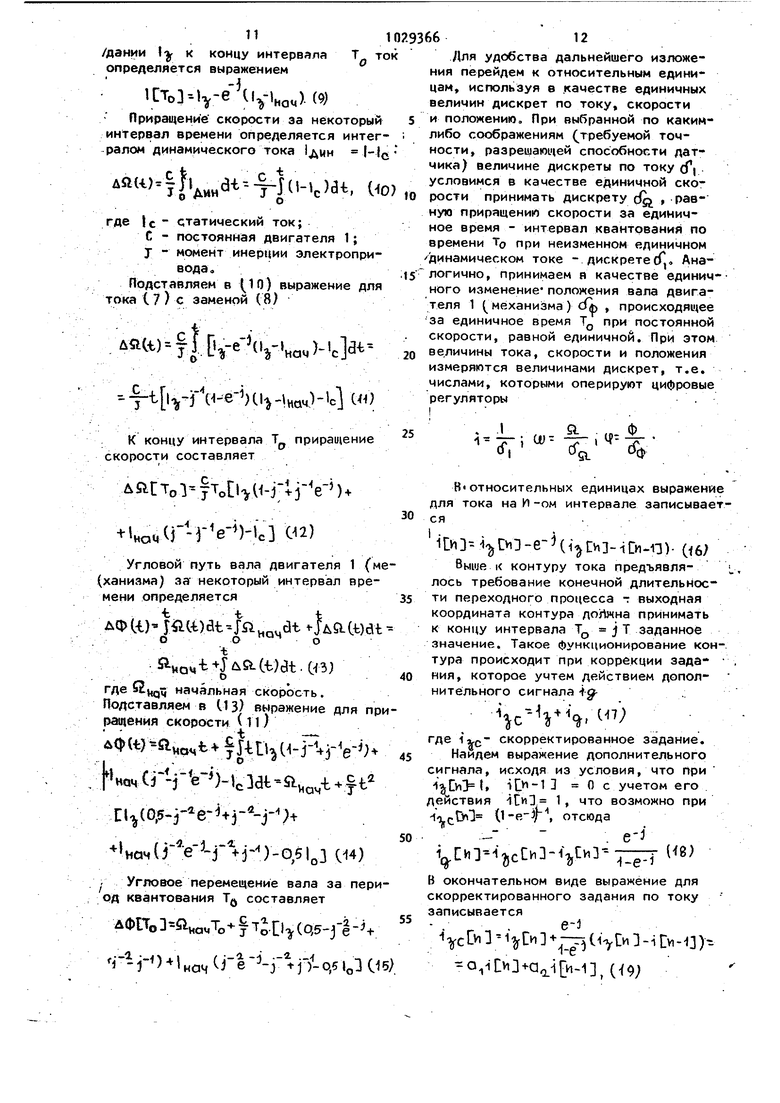
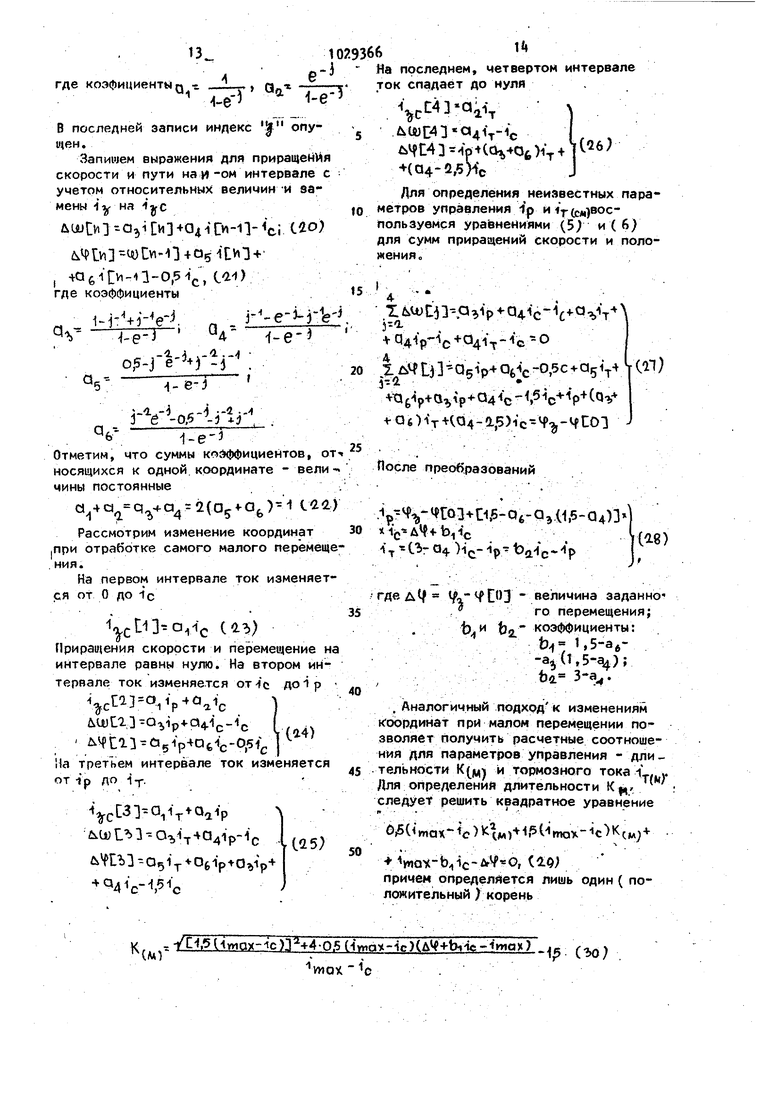
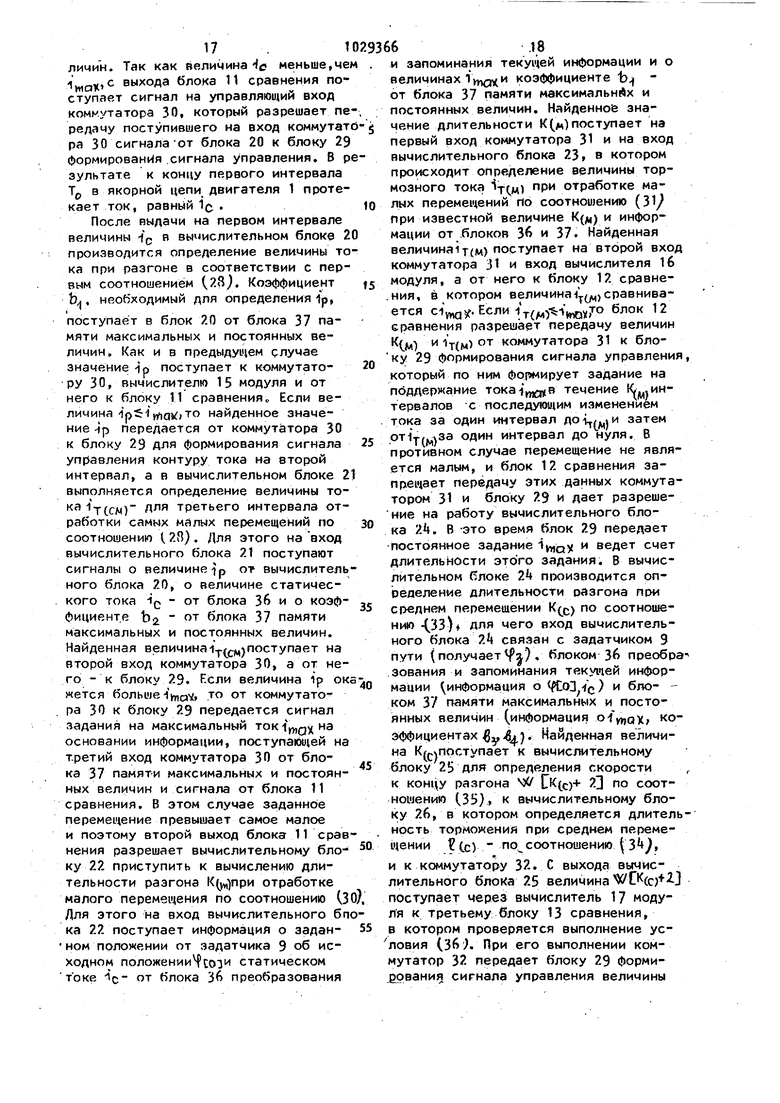
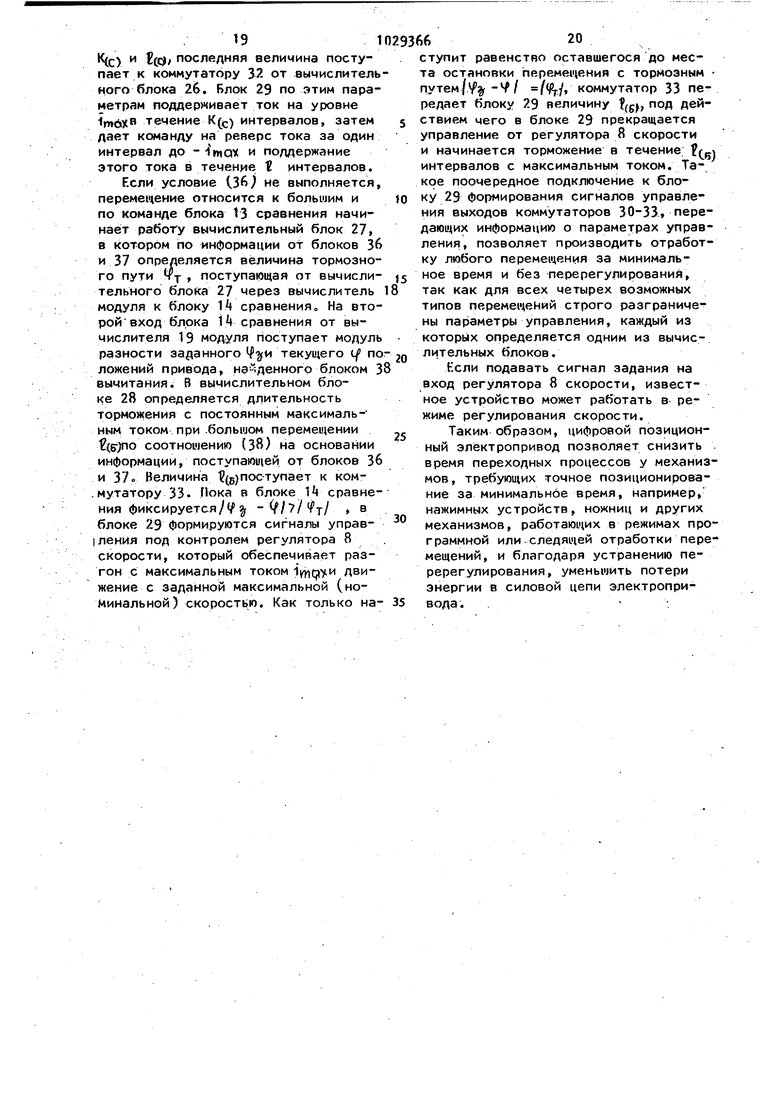
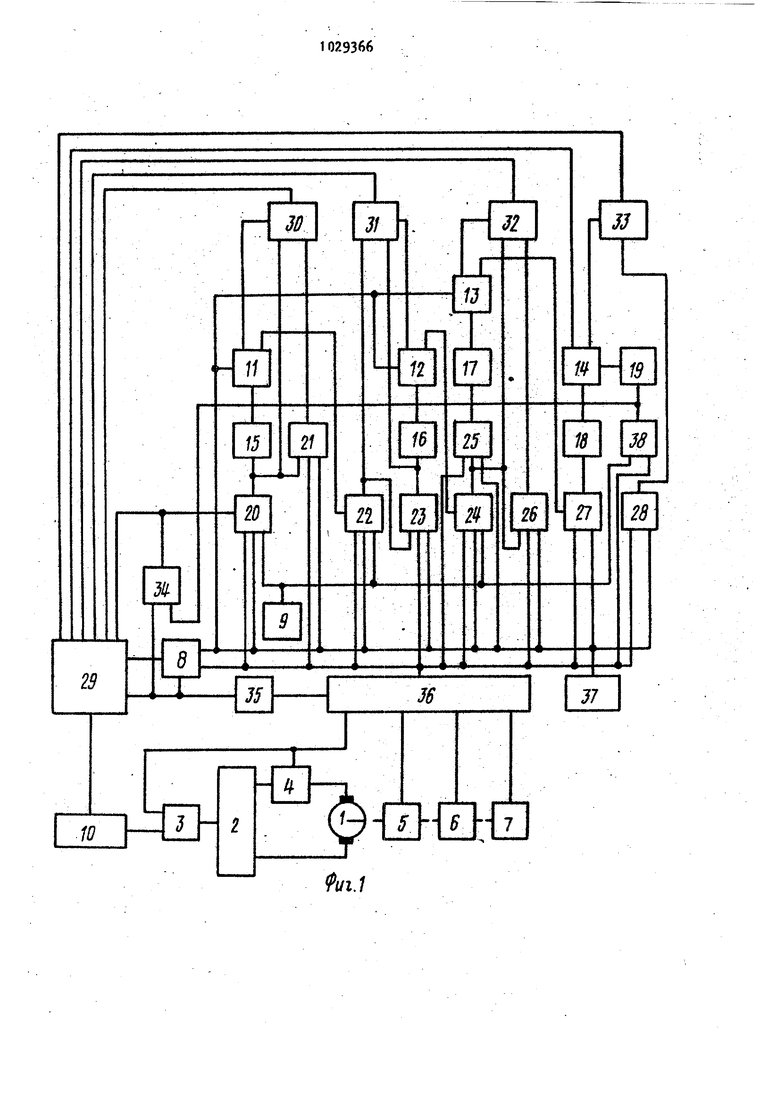
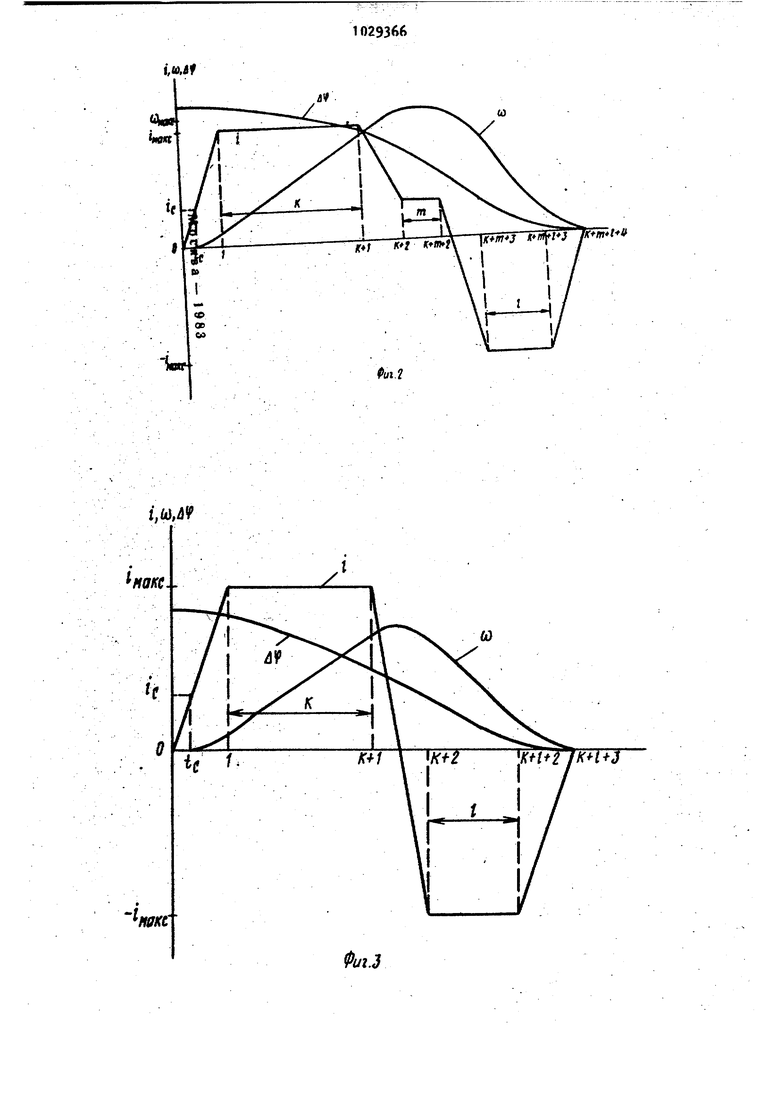
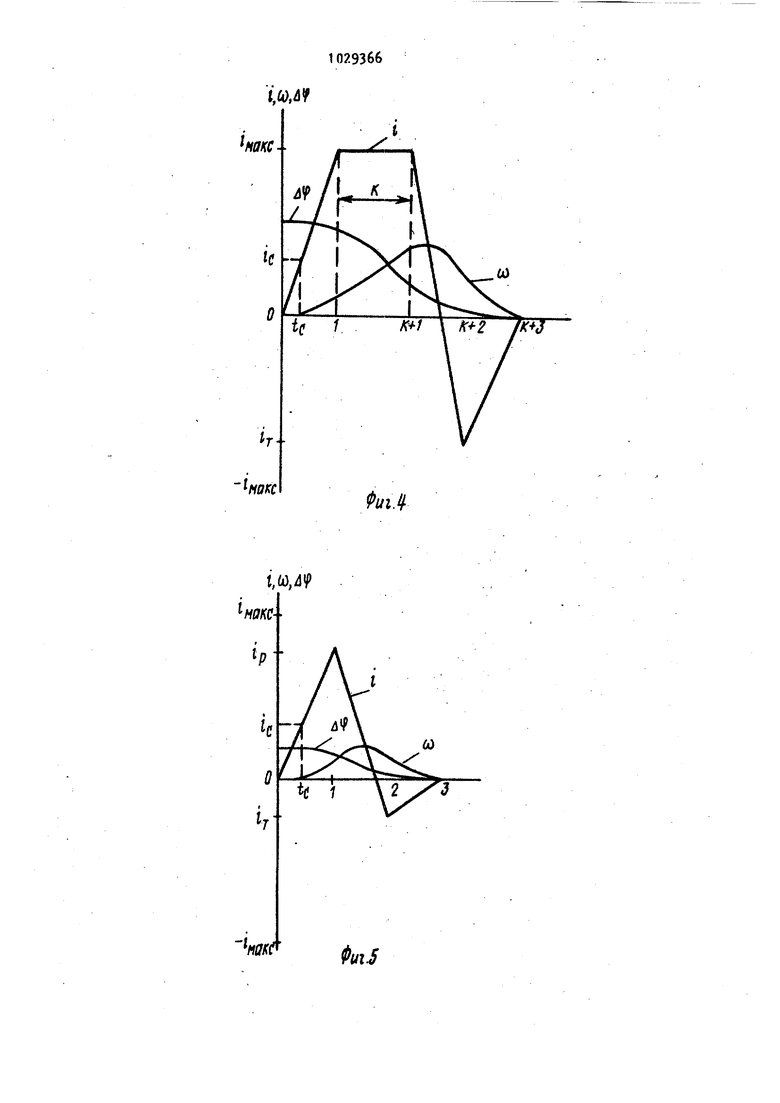
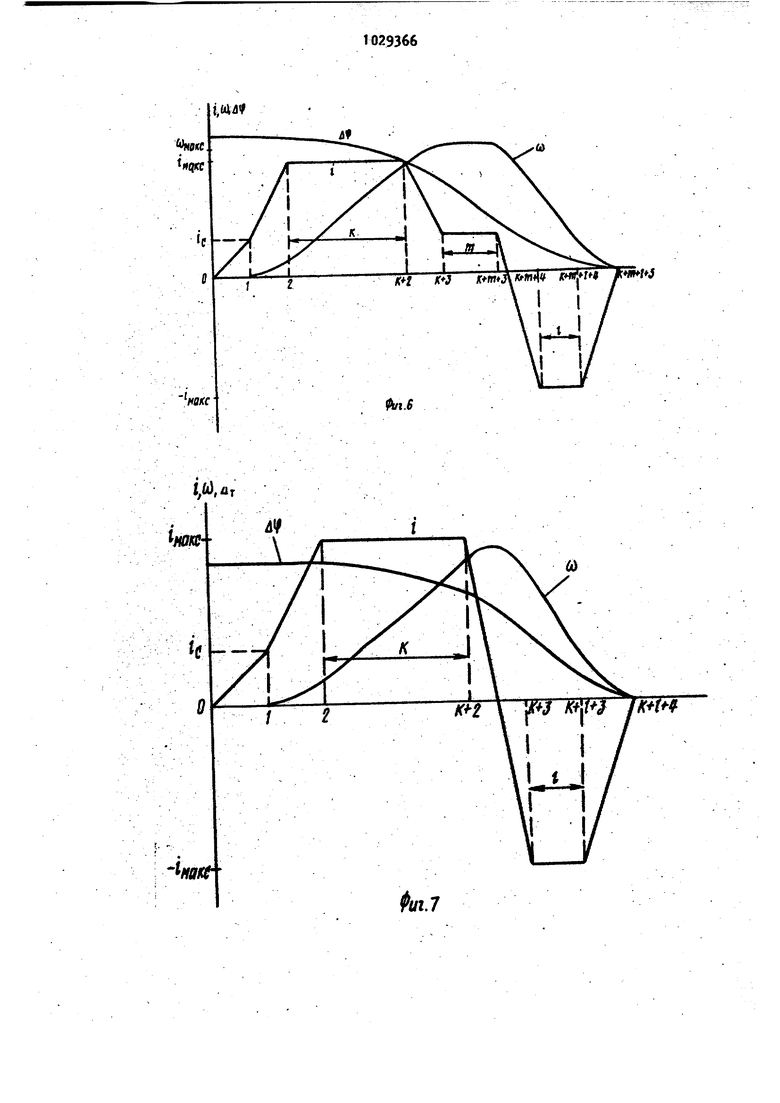
Цель изобретения - повышение точности и быстродействия отработки заданных перемещений. Лоставленная цель достигается тем что в цифровой позиционный электропривод введены три вычислителя модуля, один блок сравнения, девять вы числительных блоков, блок формирования сигнала управления, четыре коммутатора, блок управления, таймер, блок преобразования и запоминания те кущей информации, блок памяти максимальных и постоянных величин, блок вычитания. Выходы датчиков тока, ско рости, статического момента и пути подключены ко входам блока преобразования и запоминания текущей информации, управляк и ий вход которого соединен с таймером, а выход - с пер выми входами всех девяти вычислитель ных блоков, вторые входы которых под ключены к блоку памяти максимальных и постоянных величин. Третьи вхо ды первого, тпетьего и пятого вычислительных блоков соединены с запатчиком пути, а управляющий вход пе вого вычислительного блока подключен к блоку управления, выход первого вы числительного блока соединен с входа ми первого вычислителя модуля, первого коммутатора и третьим входом второго вычислительного блока, выход которого подключен ко входу первого коммутатора. Выход первого вычислителя модуля соединен с первь(м входом первого блока сравнения, первый выход которого подключен к управляющем входу первого коммутатора, а второй выход соединен с управляющим входом третьего вычислительного блока, выход третьего вычислительного блока соединен с входом второго коммутатора и третьим входом четвертого вычислительного блока, выход которого соединен с входами второго коммутатора и второго вычислителя модуля. Выход второго вычислителя модуля соединен с первым входом второго блока сравнения, первый выход которого подключен к управляющему входу второго коммутатора, а его второй выход соединен с; управляюи1им входом пятого вычислительного блока, выход которого подкж)чеи к входу третьего коммутатора, третьим входам шестого и седьмого вычислительных блоков. Вы ход шестого вычислительного блока со единен с входом третьего вычислителя модуля, выход которого подключен к первому входу третьего блока сравнения, второй вход которого соединен с вторыми входами первого и второго блоков сравнения, входом первого коммутатора и с блоком памяти максимальных и постоянных величин, первый выход третьего блока сравнения соединен с Управляю111им входом третьего коммутатора, вход которого соединен также с выходом седьмого вычислительного блока, а второй выход третьего блока сравнения подключен к управляющему входу восьмого вычислительного блока Выход восьмого вычислительного блока соединен с входом четвертого вычислителя модуля, выход которого соединен с первым входом четвертого блока сравнения, его второй вход соединен с выходом пятого вычислителя модуля, вход которого подключен к выходу блока вычитания. Входы блока вычитания связаны с задатчиком пути и выходом блока преобразования и запоминания теку1цей информации. Первый выход четвертого блока сравнения соединен с входом блока формирования сигнала управления, а его второй выход подключен к управляющему входу четвертого коммутатора, вход которого также соединен с выходом девятого вычислительного блока. Выходы всех коммутаторов, регулятора скорости и блока управления подключены ко входам блока формирования сигнала управления. Входы регулятора скорости, блока управления и блока формирования сигнала управления подсоединены к таймеру, другие входы регулятора скорости соединены также с блоками памяти максимальных и постоянных величин и преобразования и запоминания текущей информации, а вход блока управления подключен к ВЫХОДУ блока вычитания. Выход блока формирования сигнала управления соединен со входом цифро-аналогового преобразователя, выход которого соединен с другим входом.регулятора тока. На фиг 1 приведена функциональная схема цифрового позиционного электропривода; на фиг. 2-5 - графики процессов отработки разных по величине типов перемещений; на фиг.69 - варианты графиков процессов отработки. Цифровой позиционный электропривод (фиг 1 содержит последовательно соединенные двигатель 1 постоянного тока, регулируемый источник 2 якорного напряжения}, регулятор 3 тока, вход которого соединен с датчиком 4 тока, датчик 5 скорости датчик 6 статического момента, датчик 7 пути, регулятор 8 скорости, заддтчик 9 пути, цифро-аналоговый преобра зователь 10, блоки И- сравнения, вычислители модуля, вычислительные блоки, 7.0-28, блок 29 формиро вания сигнала управления, коммутаторы ЗП-33, блок 3 управления, таймер 35 блок Зб преобразования и запоминания текущей информации, блок 37 памяти максимальных и постоянных величин, блок 38 вычитания. . Выходы датчиков -7 тока, скорости, статического момента и пути подключены к входам блока 36 преобра зования и запоминания текущей информации. Таймер 35 соединен с входами блока .9 формирования сигнала управления, блока 3 управления, регулятора 8 скорости и с управляющим входом блока Зб преобразования и запоми нания текущей информации. Вход регул тора 8 скорости и первые входы вычислительных блоков 20-28 соединены с выходом блока 36 преобразования и запоминания текущей информации, а вторые их входы соединены с выходом блока 37 памяти максимальных и постоянных величин. Задатчик 9 пути связан с третьими входами вычислительных блоков 20, 22 и 2Ц и входом блока 38 вычитания, второй вход блока 38 подключен к блоку 36 преобразования и запоминания текущей информации. Выход блока З управления соединен с входом блока 29 формировани сигнала управления и управляющим вхо дом вычислительного блока 20, выход которого подключен к входам вычислителя 15 модуля и третьему входу вычислительного блока .1. Выходы вычислительных блоков 20 и 21 соединены с входами коммутатора 30. Выход вычислителя 15 модуля соединен с пер вым входом блока 11 сравнения, первый выход которого соединен с управЛЯЮ1ЦИМ входом коммутатора 30, а второй его выход подключен к управляющему входу вычислительного блока 22. Выход вычислительного блока 22 соеди нен с входом коммутатора 31 и третьим входом вычислительного блока 23 выход которого соединен с входом ком мутатора 31 и вычислителя 16 модуля. Выход вычислителя 16 модуля подключе к первому входу блока 12 сравнения, первый выход которого соединен с управляющим входом коммутатора 31, а второй его выход подключен к управля.ющему входу вычислительного блока 21. Выход вычислительного блока 2 соединен с третьими входами вычислительных блоков 25 и.26 и входом коммутатора 32. Вход вычислителя 17 модуля подключен к выходу вычислительного блока 25, а его выход соединен с первым входом блока 13 сравнения. Вторые входы блоков 11, 12 и 13 сравнения и третий вход коммутатора 30 подк;тчены к блоку 37 памяти максимальных и постоянных величин. Первый выход блока 13 сравнения соединен с управляющим входом коммутатора 32, а второй его выход - с управляю1чим входом вычислительного блока 27. Выход вычислительного блока 27 соединен с входом вычислителя 18 модуля, соединенного своим выходом с первым входом блока Т сравнения, второй вход блока I сравнения соединен с выходом вычислителя 19 модуля, соединенного с выходом блока 38 вычитания. Выход блока 38 вычитания соединен также с входом блока 3 управления. Выход вычислительного блока 28 подключен к входу коммутатора 33. управляю1ций вход которого соединен с вторым выходом блока 1А сравнения. Выходы коммутаторов 30-33, первый выход блока 1 сравнения и выход регулятора 8 скорости соединены с входами блока 29 формирования сигнала управления. Принимаем, что на всех этапах отработки перемещения электропривод работает -в зоне непрерывных токов, реверс тока не сопровождается токовой паузой либо ее, вследствие малости,можно не учитывать, переходный процесс в контуре тока заканчивается за один интервал квантования по времени Тр , Для определенности полагаем, что момент статического сопротивления по характеру - реактивный. Воспользуемся изображенными на фиг. 2 графиками изменения координат электропривода - тока двигателя i , скорости V и рассогласования по положению бЦ при отработке наиболее общего по величине типа перемещения большого По оси абсцисс отложено время, измеряемое интервалами квантования TO . На первом интервале вследствие того, что поступает задание на перемещение электропривода в координату ( при текущем положении электропривода V (рассогласование по положению 10 д1/в(Л-ф, ток двигателя изменяется от нуля до максимальногоV nax-Tpoгание электропривода происходит на интервале после превышения тоkpM величины статического тока 1 . За тем на протяжении К интервалов ток поддерживается равным максимальному, что обеспечивает при неизменном моменте статического сопротивления разгон с постоянным ускорением. Так как на участке разгона электропривод имеет целью быстрейшее достижение максимальной { номинальной ) скорости, то управление приводом на участке разгона для больших перемеудений осуществляется регулятором 8 скорости. При приближении к установившейся скорости ток за один интервал спадает от максимального до статического тока ив течением интервалов происходит движение с установившейся максимальной (номинальной) скорос тью у,рХ. Исходя из величин скооости д токов статического i, и максимально допустимогоi g производится подсчет тормозного пути. При равенст ве тормозного пути vfy и оставшегося до места остановки, определяемого разность заданного пути (положения) V-v и теку1чего вирабатывается команда на торможение. По этой команде ток за один интервал изменяется от статического i,, , затем в тече ние К интервалов поддерживается на этом уровне, на последнем интервале происходит изменение тока от -1у,а- до нуляi скорость к концу последнего интервала также достигает нулевого значения, а вал подходит к заданному потгожению. Общая длительность процес са отработки большого перемещения со ставляет K+wH-e-f t интервала. Функция управления состоит в определении момента подачи команды на торможение 1посредством определения тормозного путиfy и сопоставления его с оставшимся до места остановки путем) и длительности участка торможения g . Выполнение неравенства УМ 7 О (1 является -условием того, что перемещение относится к большим. С уменьшением величины отрабатываемых перемеи{ений длительность ум дв жения с максимальной скоростью также уменыэается и, начиная с некоторого переме1чения, она становится равной нулю. Графики процесса отработки перемем1ения, у которого отсутствует 8 часток движения с установившейся скоростью, изображены на фиг. 3. Характер процедсов на участке разгона такой же, как и при отработке ольших перемещений: на первом ин-. тервале ток изменяется от нуля до максимального, после этого на протяжении К интервалов происходит разгон электропривода при постоянном токе В момент времени К+1 интервал поступает команда на реверс тока за один интервал oTtyy,Qjc до тах последующим замедлением при постоянной величине тока -Jj av-Ha последнем интервале ток спадает от - нуля, к концу интервала скорость и остаа.шийся путьДУ также принимают нулевые значения, Общая длительность такого перемещения, которое относится к средним, составляет K+g+3 интервала, а управление его отработкой состоит в определении, длительности участков разгона К и торможения f. Перемев1ение относится к средним, если справедливы соотношения W - О . K-70i U) Г1ри отработке менычих перемещений может оказаться, что один из участков установившегося тока (К либо - в зависимости от величины и характера момента статического сопротивления} равен нулю. Графики процесса отработки перемещения, у которого отсутствует участок установившегося тока при торможении (6 ОJ, приведены на фиг. k. На первом интервале ток изменяется от нуля до iyy,Qy и на протяжении К интервалов поддерживается на этом уровне, затем на предпоследнем интервале ток изменяется от;, „до .величины тормозного тока 1 , К концу последнего интервала ток, скорость и оставшийся путь приходят к нулевым значениям. Общая длительность процесса отработки перемещения составляет К+3 интервала . Это перемещение относим к малым. Задача управления процессом отработки малых перемещений заклочается в определении длительности участка разгона К и величины тока при торможении h-fl 5 Ijijov liyASM относить перемещение к малым, если выполняется соотношение ) К70 ) При дальнейшем уменьшении величины начального рассогласования уменьшает. ся длительность участка с установившимся током при разгоне и, начиная с некоторого начального рассогласования становится равной нулю. При отработке такого перемещения потребуется уменьшить ток при разгоне по сравнению с максимальным, причем исчезает участок установившегося тока. Графики процесса отработки перемещения изображены на фиг. 5о На первом интервале ток изменяется от нуля до величины тока при разгоне происходит разгон привода на втором интервале ток изменяется от i р до тормозного тока / 1т-1 таУ третьем, последнем интервале ток изменяется до нуля, скорость и рассогла сование по положению также достигают нулевых знаменийi Длительность процесса отработки такого перемещения, которое называем самым малым, составляет всего 3 интервала. Задача управления процессом отра1ботки самого малого перемещения состоит в определении величин токов при разгоне Лп и торможении j-. Для самых малых перемещений справедливо ..g Таким образом, при отработкЪТйобого перемещения неизвестными парамет рами управления всегда являются две величины: Ip и -fy при самом малом перемещении, К и l-j-- при малом, К и Р- при среднем, ifj и 8- при большом перемещении. Для их определения в устройстве предусмотрены вычислительные блоки 20-28. Исходными данными для вычисления двух неизвестных величин управления служат два урао-. нения - для приращений скорости и положения по интервалам о Сумма приращений скорости равна ну/во .z&uui:j.o, (5; сумма приращений положения равна заданному перемещению 1й.чп -м з-чсоз, (t; где ,ik flljl соответственно приращения скорости и положения за j -ый интервал; 1 6 ,- заданное положение; исходное положеИ - длительность процесса отработки в интервалах. При наличии на валу двигателя 1 момента статического сопротивления трогание электропривода при изменении на первом интервале тока от нуля происходит не сразу, а лишь после достижения током величины статического тока, и для использования уравнений (5) и С 6 )необходимо дополнительно иметь информацию о величине приращений скорости и перемещения на первом интервале, начиная с момента трогания электропривода. Обладание этой информацией потребует введения в устройство дополнительных вычислительных блоков. Однако это препятстрие устраняется, если на первом интервале давать задание току якорной цепи изменяться не до величин „д или-fp ( при отработке самых малых перемещений ), а до величины статического тока -if. . Тогда движение начинается с второго интервала, длительность отработки увеличивается на один интервал при сохранении на остальных участках всех особенностей процессов, описанных выше Графики процессрв отработки большого, среднего, малого и самого малого перемещений при изменении тока на первом интервале от нуля до -i(j п редставлены соответственно на фиг. 6, 7 8 и 9. Найдем зависимости, связывающие между собой изменение тока, приращения скорости и пути. Контур тока обычно представляют в виде апериодического звена первого порядка, у которого его выходная координата изменяется по закону Ut),,o,), {.7; где )-, заданное и начальное зна чение тока; Т - пЪстоянная интегрирования аналогового контура тока. Пусть интервал квантования по вреени принят равным , , (б) ричём Ь пЪ условиям устойчиости Обычно величина jf. С учеом уравнения (8) при постоянном за/дании 1 к концу интервала Т то определяется выражением lCTo3-l -e i -),j. (9) Прираи ение скорости за некоторый интервал времени определяется интег-ралом динамического тока 1дмн 1-1с ||А И ;--Г| -О. to где 1с статический ток; С - постоянная двигателя 1; J - момент инерции электропривода. Подставляем в (10) выражение для тока ( 7 ) с заменой (8) f I ) -з- %- - ®НК ночЬ1с (Ю К концу интервала Т приращение скорости составляет AfttTol-fT El M-j-lj-е-) HauU-re-)Vc 02) Угловой путь вала двигателя 1 (м (ханизма) за некоторый интервал времени определяется Ф(А) 1Л(.4)аъ-1л,аца11-|дасадъ ,Q,(t)dt.) где начальная скорость. Подставляем в 113) выражение для пр ращения скорости И) (:)-ацо Ь ||4:1:1 Ц-Яз-е- )- c3at-si,i.ft Щ(( (Г:е -Г-ьЗ-)-0, W . Угловое перемещение вала за пери од квантования Т составляет AOno3 ftHc,.El(0,5-j-i-:+ 1-Г)нач reV j-li q l l 0 Для удобства дальнейшего изложения перейдем к относительным единицам, используя в качестве единичных величин дискрет по току, скорости и положению. При выбранной по какимлибо соображениям (требуемой точности, разрешающей способности датчика) величине дискреты по току (f . условимся в качестве единичной скорости принимать дискрету с , приращению скорости за единичное время - интервал квантования по времени Т при неизменном единичном инамическом токе - дискрете сГ. Аналогично, принимаем в качестве единичного изменение положения вала двигателя 1 (механизма) cG) , происходящее за единичное время Т при постоянной скорости, равной единичной. При этом величины тока, скорости и положения измеряются величинами дискрет, т.е. числами, которыми оперируют цифровые регуляторы. Вотносительных единицах выражение для тока на И-ом интервале записываетсяiLnDv-i- Cvil-e-ni Cna-iCM-n)- (67 Выше к контуру тока предъявля- ;, лось требование конечной длительности переходного процесса - выходная координата контура дотична принимать к концу интервала , j Т заданное значение. Такое функционирование кон-, тура происходит при коррекции зада- ния, которое учтем действием дополнительного сигнала 1 .; ; где la-c скорректированное задание. Найдем выражение дополнительного сигнала, исходя из условия, что При ЙСи t 3 0 с учетом его действия itn 1, что возможно при lVt.Dft ( отсюда - - . е-г i(:ni-i- cCn -i i:yi3-:f7Fr в окончательном виде выражение для скорректированного задания по току записывается Си 3 м Си (I-y Си 3-i Cvi ИЗ),, где коэфициентыд B последней записи индекс щен. Запишем выражения для приращейй скорости и пути на интервале учетом относительных величин -и замены 1у на чус лшСиЗ 1 Си-11- ei С4о) i. i«Lv -O+05tv l-b , - i{:vi-ti-o,5i., ) где коэффициенты iH-r+rV. r -e-J-i:-f-e ± ± е-З rV ojs-lrirV t-e Отметим, что суммы )фициентов, носящихся к одной, координате - вел чины постоянные W b°4 Рассмотрим изменение координат .при отработке самого малого перёме На первом интервале ток изменяе ся от О до 1с Vctll-O l,., (Ъ) Приращения скорости и перемещение интервале равны нулю. На втором ин тернале ток изменяется от-(с до1р .Q й.Ц)С1 -аг1р а4.1с-1с i /„4) Ci3-cj5VOfe c-o,5iV На третьем интервале ток изменяетс от 1 р до у. 1(,,1р fiviD L 3 о-,,|-г- а4р с uiYtbl-a i-r Obip-va iV ,510 Ч|цГ HniQy-ic)CAt -fbiic-imax) , j VVJQH . Ha последнем, четвертом интервале ток спадает до нуля . V« 41-a;,i Mwc41«a4iVic 1.,„,. .4t4 3 pHcH4afe )IT + П26; v(a4-2,5Kc Для определения неизвестных параметров управления IP Hir(fi,} ocпользуемся уравнениями (5) и ( 6) для сумм приращений скорости и положения. --: ) 3 . . vq4ip-ic- a4i -ic-o ,1 uMtllasip+Qttc-o. TCil) 4X5 ip+о,, ip- 04 с - . W Q-b a«)iTHQ4-5L,5)ic-4 -4i:01 После преобразований . -Ч ЧГоз- -0.,Х1,5-а4)3) 1c-A4 bi1ciMg) 4T-CVa4)i,-iprt)afc- V j , гдед(| еличина заданно О перемещения; , 1, коз ищ еи-гы: Ь .Б-а); Ьа. 3-а. , Аналогичный подходк изменениям координат при малом перемещении позволяет получить расчетные соотношения для параметров управления - длительности и тормозного тока i .. Для определений длительности , следует решить квадратное уравнение б()Л«)+ М тох-с)Кс„;-« waX-b ic-ArV O, (Ю; причем определяется лишь один ( положительный У корень
51029366
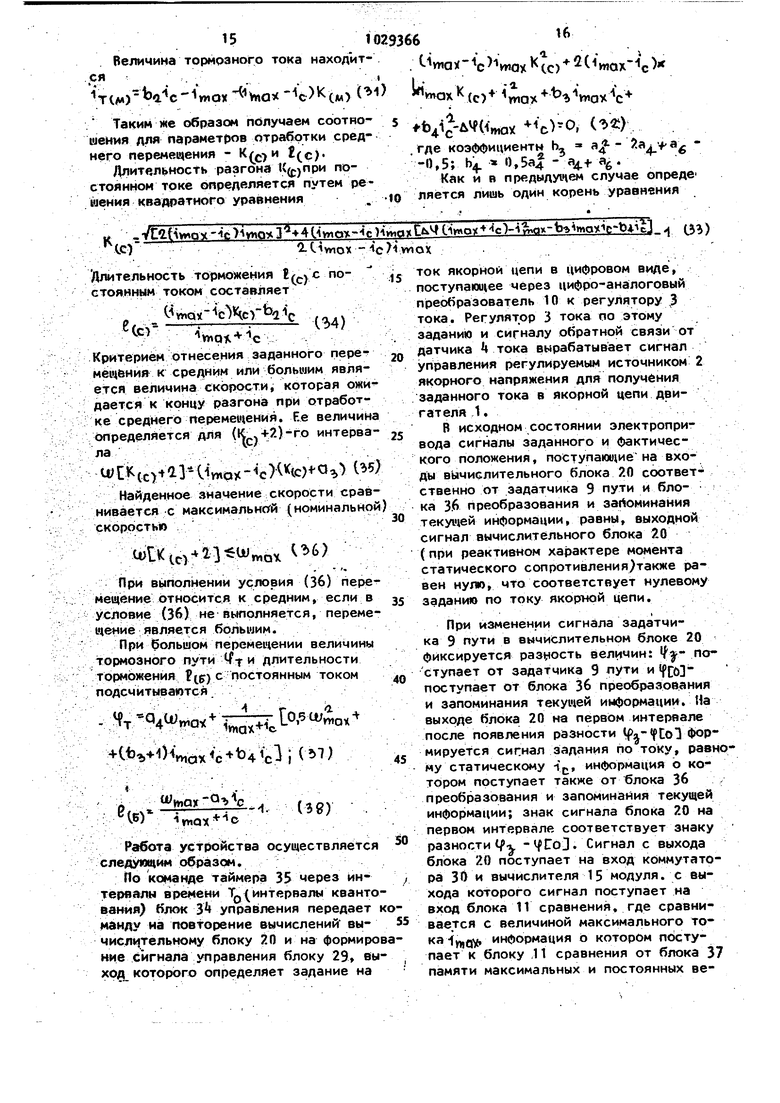
Величина тормозного тока находит-{i«.,,j-i i k 0f л
Cfl CK C WIOX CC)
т(и)Цс-1«10хЧ1у,) (c)
Таким же образом получаем соотно s j i AVP{4 +i vo () ыения ЛЛЯ параметров отработки сред- 4 с / него перемещения - К и (с). . где коэффициентн Ь, а
Длит льность разгона K(pjnpH постоянном токе определяется путем решения квадратного уравнения , -«О
и -Vt { v ox c wo 3 4C vиo - e ivиaxU Ci «o cVi (Зг)
tc)2-Uwiox-IC WQX Длительность торможения v) стоянным током составляет t V«Q« )4c) Критерием отнесения заданного перет мёщбния к средним или большим является величина скорости, которая ожи дается к концу разгона при отработке среднего перемещения. Ее величин определяется для (К.4;2)-го интерва па - .- ;: : ;. , :. -. )aг Найденное значение скорости срав нивается с максимальногй (номинально скорбстью tKlc) При выполнении условия (36) пере мещение относится к средним, если в условие (36) не выполняется, переме щение является большим. При большом перемещении величины тормозного пути f и длительности т6рмрж€ния ) с постоянным током подсчитываются; - г. а , ..-1Ht,,-.-l)v,4c b4ic3i(51) . t jjjOjf-O ) n. Работа устройства осуществляется следующим образом. По коианде таймера 35 через йнтервалы времени Т(интервалы кванто В1ания) блок 34 управления передает манду на повторение вычислений вычислительному блоку 20 и на формиро ние сигнала управления блоку 29, вы ход которого определяет задание на
55й4- б -0,5; Ьф 0,5а -ад. а.
Как и в предыду1нем случае опреде ляётся лишь один корень уравнения ток якорной цепи в цифровом виде, поступащее через цифро-аналоговый преобразователь 10 к регулятору Д тока. Регулятор 3 тока по этому заданию и сигналу обратной связи от датчика тока вырабатывает сигнал управления регулируемым источником 2 якорного напряжения для получения заданного тока в якорной цепи двигателя 1. В исходном состоянии электропривода сигналы заданного и фактического положения, поступаюи ие на входы вычислительного блока 20 соответственно от задатчика 9 пути и бло- ка 36 преобразования и заЛоминания текущей информации, равны, выходной сигнал вычислительного блока 20 (при реактивном характере момента статического сопротивленйя)также равен нулю, что соответствует нулевому заданию по току якорной цепи. При изменении сигнала задатчика 9 пути в вычислительном блоке 20 фиксируется разность величин: поступает от задатчика 9 пути и f б поступает от блока 36 преобразования и запоминания текущей информации. На выходе блока 20 на первом интервале после появления разности to 1 Формируется сигнал задания по току, равному статическому nj,, информация о котором поступает также от блока 36 преобразования и запоминания текущей информации; знак сигнала блока 20 на первом интервале соответствует знаку разности If -vfToJ. Сигнал с выхода блока 20 поступает на вход коммутатора 30 и вычислителя 15 модуля. с выхода которого сигнал поступает на вход блока 11 сравнения, где сравнивается с величиной максимального тока-f , информация о котором n k;Tyпает к блоку .11 сравнения от блока 37 памяти максимальных и постоянных величин. Так как величина с меньше,че , с выхода блока 11 сравнения поС . W . . . ступает сигнал на управляющий вход коммутатора 30, который разрешает пе редачу поступившего на вход коммутат pa 30 сигнала-от блока 20 к блоку 29 формирования .сигнала управления. В р зультате к концу первого интервала Tjj в якорной цепи двигателя 1 протекает ток, равный 1с . После выдачи на первом интервале величины -fp в вычислительном блоке 2 производится определение величины то ка при разгоне в соответствии с первым соотношением (23). Коэффициент Ъл, необходимый для определения 1р, поступает в блок 20 от блока 37 памяти максимальных и постоянных величин. Как и в предыдущем случае значение -jp поступает к коммутатору 30, вычислителю 15 модуля и от него к блоку 11 сравнения„ Если величина ip fjrtai найденное значение -ip передается от коммутатора 30 к блоку 29 для формирования сигнала управления контуру тока на второй интервал, а в вычислительном блоке 2 выполняется определение величины тока 1-г(см) f третьего интервала отработки самых милых перемещений по соотношению {2П). Для этого на вход вычислительного блока 2t поступают сигналы о величине-jp от вычислитель ного блока 20, о величине статического тока IQ - от блока 36 и о коэффициенте Ь2 блока 37 памяти максимальных и постоянных величин. Найденная величина 1,.,поступает на второй вход коммутатора 30, а от него - к блоку 29. Нсли величина IP ок ,, I жется Польше-lyncjV JO от коммутатора 30 к блоку 29 передается сигнал задания на максимальный основании информации, поступащей на третий вход коммутатора 30 от блока 37 памяти максимальных и постоянных величин и сигнала от блока 11 сравнения. В этом случае заданное перемещение превышает самое малое и поэтому второй выход блока 11 срав нения разрешает вычислительному блоку 22 приступить к вычислению длительности разгона К()при отработке малого перемещения по соотношению (30, Для этого на вход вычислительного блока 22 поступает информация о задан- 55
ном положении от задатчика 9 об исходном положении СОЗИ статическом
токе от блока 36 преобразования
и к коммутатору 32. С выхода вычислительного блока 25 величина WCK(cj+Zj поступает через вычислитель 17 модуля к третьему блоку 13 сравнения, в котором проверяется выполнение условия (ЗбЛ При его выполнении коммутатор 32 передает блоку 29 форми рвания сигнала управления величины и запоминания текущей информации и о величинах 1,,ОУ( и коэффициенте Ъ от блока 37 памяти максимальнйх и л. . . . .,.. ......... ..Ь.. постоянных величии. Найденное значение длительности К(м)поступает на первый вход коммутатора 31 и на вход вычислительного блока 23, в котором прюисходит определение величины тормозного тока т{,м) Р отработке малых перемещений по соотношению (31у при известной величине К(;ц) и информации от .блоков 36 и 37. Найденная величина1т(м) поступает на второй вход коммутатора 31 и вход вычислителя 16 модуля, а от него к блоку 12 сравнения, в котором величина V(,i) сравнивается с1уаду.Если1т.(, б-ло 2 сравнения разрешает передачу величин ) KM коммутатора 31 к блоку 29 формирования сигнала управления, который по ним формирует задание на поддержание тока-j, в течение (Сд. интервалов с последующим изменением тока за один интервал .и затем от1у,.,чза один интервал до нуля. В противном случае перемещение не является малым, и блок 12 сравнения запрещает передачу этих данных коммутатором 31 и блоку 29 и дает разрешение на работу вычислительного блока 2й. В -это время блок 29 передает постоянное задание и ведет счет длительности этого задания. В вычислительном блоке 2 производится определение длительности разгона при среднем перемещении К() по соотношению-(33) для чего вход вычислительного блока связан с задатчиком 9 пути (получается ), блоком 36 преобразования и запоминания текущей информации информация о ) и бло- ком 37 памяти максимальных и постоянных величин (информация , коэффициентах у-бл)- Найденная величмна К(,прступает к вычислительному блоку 25 для определения скорости к концу разгона СК(с)+ 2 по соотношению (35), к вычислительному блоку 26, в котором определяется длительность торможения при среднем перемеЩении fcc) - по соотношению , Чс) &f последняя величина поступает к коммутатору 32 от вычислитель ного блока 26. Блок 29 по этим параметрам поддерживает ток на уровне т6Х течение К(i(.) интервалов, затем дает команду на реверс тока за один интервал до - 4tnG. и поддержание этого тока в течение t интервалов. Если условие (36) не выполняется, перемещение относится к большим и по команде блока 13 сравнения начинает работу вычислительный блок 27, в котором по информации от блоков Зб и 37 определяется величина тормозного пути чу , поступающая от вычислительного блока 27 через вычислитель модуля к блоку 14 сравнения. На второй вход блока 14 сравнения от вычислителя 19 модуля поступает модуль разности заданного текущего i/ 0 ложений привода, наведенного блоком 3 вычитания. В вычислительном блоке 28 определяется длительность торможения с постоянным максимальным током при .большом перемещении (бг)по соотношению (38) на основании информации, поступающей от блоков 36 и 37о Величина (Б)пос-тупает к ком,мутатору 33. Пока в блоке 14 сравнения фиксируется/ / -Mtfl jj t в блоке 29 формируются сигналы управIления под контролем регулятора 8 скорости, который обеспечивает разгон с максимальным током 1(}(уи движение с заданной максимальной (номинальной) скоростью. Как только наступит равенство оставшегося до места остановки перемещения с тормозным путем/ - I (%, ксжмутатор 33 передает блоку 29 величину , под действием чего в блоке 29 прекращается управление от регулятора 8 скорости и начинается торможение в течение интервалов с максимальным током. Такое поочередное подключение к блоку 29 формирования сигналов управления выходов коммутаторов 30-33, передающих информацию о параметрах управления, позволяет производить отработку любого перемещения за минимальное время и без перерегулирования, так как для всех четырех возможных типов перемещений строго разграничены параметры управления, каждый из которых определяется одним из вычислительных блоков. Ксли подавать сигнал задания на вход регулятора 8 скорости, известное устройство может работать в режиме регулирования скорости. Таким образом, цифровой позиционный электропривод позволяет снизить время переходных процессов у механизмов , требующих точное позиционирование за минимальное время, например,нажимных устройств, ножниц и других механизмов, работающих в режимах программной или следящей отработки перемещений, и благодаря устранению перерегулирования, уменьшить потери энергии в силовой цепи электропривода.
I,
наке..
1,4
k Q
ta
Фиг
Цщие HlffC
-I
макс
г.$
haff
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| и др | |||
| Управление вентильными электроприводами постоянного тока | |||
| М., Энергия, 1970, с, 83-9. | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ дубления кожи | 1944 |
|
SU65755A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
