(54)- УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ MOMEHTCS ВРЕМЕНИ КВАНТСВАНИЯ СИГНАЛА

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения моментов времени квантования сигнала | 1986 |
|
SU1325695A2 |
| Адаптивный временной дискретизатор | 1977 |
|
SU680015A1 |
| Устройство для определения моментов времени квантования сигнала | 1975 |
|
SU714642A1 |
| Адаптивный временной дискретизатор | 1976 |
|
SU577668A1 |
| Устройство для определения моментов времени квантования сигнала | 1982 |
|
SU1069154A2 |
| Устройство для определения моментов времени квантования | 1976 |
|
SU588625A1 |
| Устройство для определения моментов времени квантования сигналов | 1980 |
|
SU892701A1 |
| Устройство для определения моментов времени квантования сигнала | 1973 |
|
SU456361A1 |
| Адаптивный временной дискретизатор | 1981 |
|
SU1005301A2 |
| Линейный интерполятор | 1980 |
|
SU886014A1 |
1
Изобретение относится к измерительным информациок1О)1м системам и может быть использовано, например в телеметрии, системах связи и управления.
По основному авт.св. № 456361 известео устройство для определения моменТОБ времени квантования сигнала, содержащее дифференцирующий блок, подключенный ко входу запоминающ&- ычитающего блока, интегратор, вход которого соеди иен с выходом запоминакнце-вычитающего блока, и блок срЕВВнения, один из входов которого подключен к выходу интегратора, а выход- ко входу сброса интегратора и к управляющему входу зап(4инающе-вычитаюшего бпокЕц другой вход блока сравнения подключен к шине задания величины допустимой погрешности, Ъ котором заданная допустимая погрешность аппроксимации неизменная ио шка- п пе сигнала.
Однако в ряде случаев высокая точность необходима только при измерениях вблизи номинального значения сигнала.
и по мере удаления от этого значения допустимая погрешность аппроксимации может значительно увеличиваться. При известное устройство с неизменной попрешностью аппроксимации вносит большое количество избыточных отсчетов сигнала.
Цель изобретения - повышение точности устройства при намерениях вблизи номинального значения сигнала.
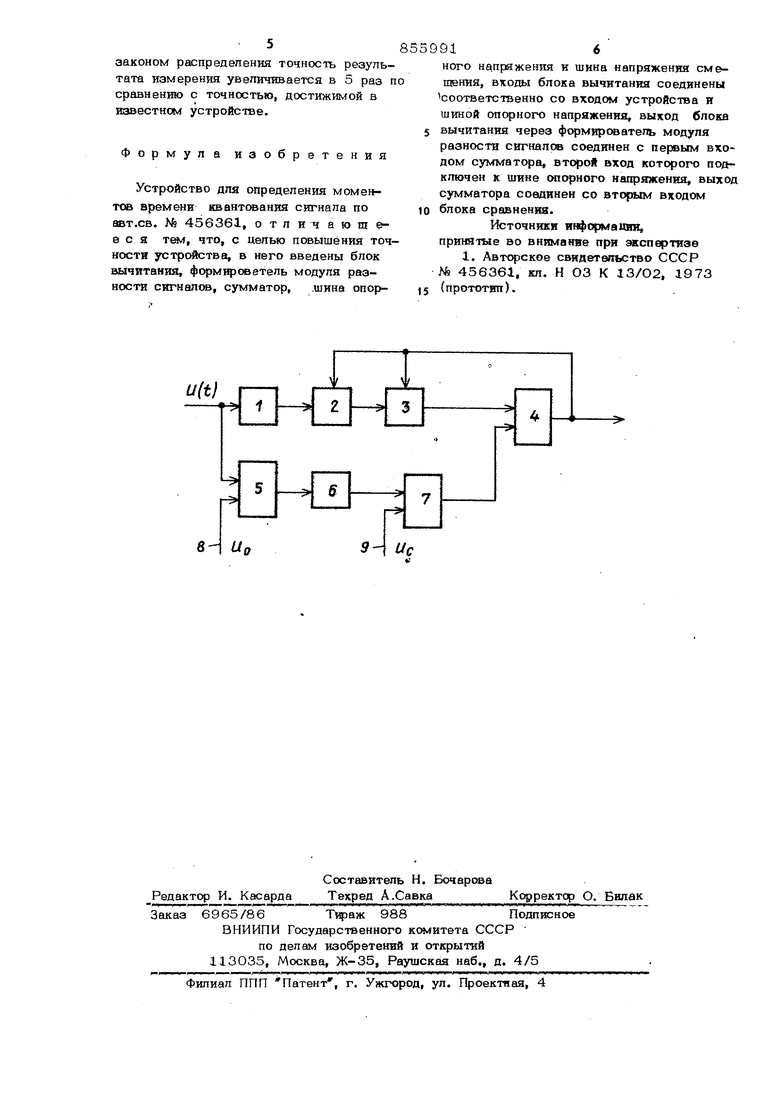
Поставленная цель достигается тем, что в устройство для определенш моментов времени квантсжания сигнала введены блок вычитания, форм фО1ватель модуля разности сигнале, сумматор, шина опорного напряжения и шина напряж&ния смещения, входы блока вычитания соединены соответственно со входом устройства и шиной опорного напряжения, выход блока вычитания через формирователь модуля разности сигнаяов соединен с первым входом сумматора, второй вход которого подключен к шине опораего налряжения, выход сумматора соединен со вторым входом блока сравнения. , На чертеже изображена структурная схема устройства. Устройство содержит дифференци рующий блок 1, запоминающе- ычитающи блок 2, интегратор 3, блок 4 сравнения, блок 5 вычитания, формирователь 6 модуля pa3HOCTif сигналов, сумматор 7, шину 8 опорного напряжения и шину 9 напряжения смещения. Устройство работает следующим обра зом. Входной сигнал U( t ) поступает на .ди Аеренцирующий блок. 1, на выходе которого появляется напряжение, пропорцио нальное первой производной входного сиг нала. Это напряжение подается на блок где происходит заполнение первой произв дной сигнала в начале интервала дискретизации ( в точке отсчета) и вычисле ние разности между заполненным значе нием первой производной и текущим ее значением. Эта разность поступает на интегратор 3 . На выходе интегратора 3 образуется сигаал, пропорциональный текущей погрешности аппроксимации € (t ) ,который поступает на один из входов блока 4 сравнения. На выходе бпока 5 образуется напряжение, равное разности между напряжением входного сигнала U ( t ) и постоянным (опорным) напряжением UQ. С помощью формиров теля 6 вычисляется абсолютное значение этой разности, которое затем суммируется с напряжением смещения U в сумматоре 7. Выход сумматора 7 блока подключен ко второму зходу блока 4 сравнения, который срабатывает при достижении равенства : €( t ) , (.) где k - коэффициент передачи по напряжению последовательно соединенных блоков 1 и 2 и интегратора 3. При срабатывании блока 4 сравнения на его выходе формируется сигнал дискретизации. Одновременно происходит сброс интегратора 3 и запоминание первой произдюдной сигнала U { t ) в блоке 2, после чего начинается следующий интервал дискретизации. Как следует из (1), погрешность в конце интерва ла дискретизации уменьшается при умен
шенин модуля разности напряжения сипнала и ( -Ь ) и напряжения Up , ксР торсе выбирается равным номинальному
ся заданная точность измерения сигнала в 1О раз меньше номинального значения сигнала, то для сигналов с нормальным 14 начению сигнала U ( -Ь ). Наиеньшая погрешность иемет место при t ) его lioавенстве сигнала (j инальному значению U, у и на основаИИ (1) она равна отношению-напряже0 к коэффициенту переия смещения ачи К : Р .УС. m-ifl- к Наибольшая погрешность достигается при максимальном отклонении сигнала U ( t ) от своего номинального значения и о : lU(-tJ-L;gt 4Uc По заданным значениям минимальной к максимальной погрешностей аппроксимаиии € и€YTWlX t номинальному значе- . нто сигнапа Up и максталальному отклонению U ( -Ь ) -Uo/tnrtX основании (2) и (З) можно нейти нужные значения напряжения смещения УС и коэффициента передачи . Из описания работы устройства следует, что по мере удаления измеряемого сигнала от его номинального значения погрешность предсказания автематически увеличивается Е соответствии с формулой (1). Это приводит к уменьшеншо количества отсчетов сигнала на неинтересующих участках и, спедовательно, к уменьшению средней частоты дискретизации. В измерительных информационных системах с адаптивной дискретизацией средняя частота адаптивной дискретизации является величиной заданной, и кревышение ее приводит к потере существенный отсчетов и к увеличению погрешноста восстановления сигнала (1). Для известногчэ дискретизатора с постоянной по шкале сигнала уставкой погрешности предсказания средняя частота дискретизации в соответствии с (1) рассчитьюается по формуле : Я 0,, ТОе я среднеквадратическое отклонение второй производной сигнала. Расчеты, проведенные на основании последнего выражения и формул {1)-(3) описания работь предлагаемого устройства показывают, что если ширина зоны, в которой должна выдерживатьзаконом распредепения точность результата измерения увеличивается в 5 раз п сравнению с точностью, достижимой в известном устройстве.
Формула изобретения
Устройство для определения момеитов sspeMeHH квантсвания сигнала по №т.св. № 456361, отличающееся тем, что, с целью повышения точности устройства, в него введены блок вычитания, форм1фоветель модуля разности сигналов, сумматор, .шина опорного напряжения и шина напряжения сме щения, входы блока вычитания соединены соответственно со входом устройства и шиной опорного напряжения, выход блока вычитания через формирователь модуля разности сигналов соединен с первым входом сумматора, второй вход которого подключен к шине опорного напряжения, выход сумматора соединен со вторым входом
блока сравкен1ш.
Источники янформашга, приня1ые во внимание при жспертизе 1. Авторское свидетельство СССР № 456361, кл. Н ОЗ К 13/О2, 1973
(прототип).
