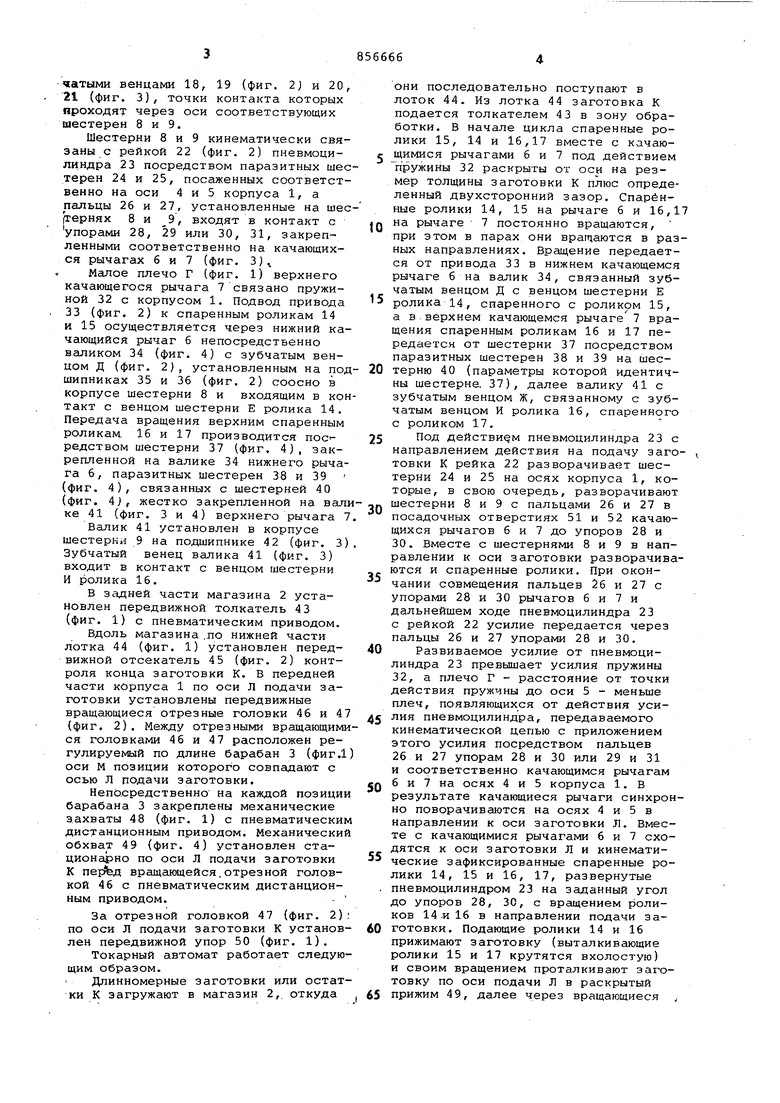
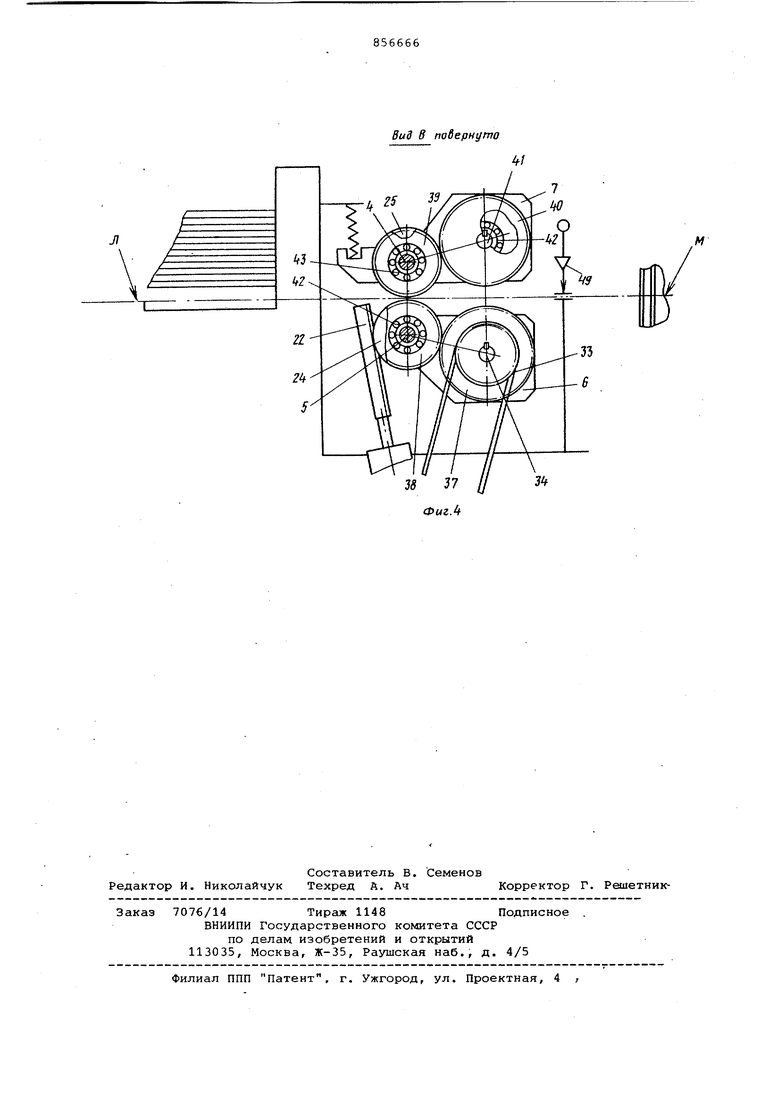
(54) ТОКАРНЫЙ АВТОМАТ Изобретение относится к станкостроению и может быть использовано для обработки длинномерных заготовок и прутков из отходов различного профиля. Известен токарный автомат, содержащий корпус, магазин заготовок, подпружиненный толкатель, соединенный с пневмоцилиндром, резцовые головки и упоры, установленные на корпусе l . Недостатками известного устройства являются невозможность обработки длинномерных заготовок из-за ограниченного действия подпружиненного тол кателя, а также потеря устойчивости заготовки при одностороннем зажиме в шпинделе вращения и действии центр бежных сил на незакрепленный конец заготовки при вращении. Цель изобретения - расширение тех нологических возможностей за счет обеспечения обработки длинномерных заготовок различного профиля и улуч 1|1ение условий эксплуатации путем обе печения выброса немерного остатка прутка. Для достижения поставленной цели корпус снабжен установленными с возмож ностью качания подпружиненнымирычагами с ограничителями, при этом на рычагах, на равных расстояниях от осей качания закреплены с возможностью проворота шестерни, предназначенные для взаимодействия с указанными ограничителями и снабженные попарно установленными осями с закрепленными на них роликами, имеющими возможность противоположного вращения от собственного привода. Кроме того, пневмоцилиндр снабжен рейкой, кинематически связанной с шестернями. На фиг. 1 изображен токарный автомат для подачи и резк заготовок, общий вид на фиг. 2 - разрез А-А на фиг. If на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - вид В на фиг. 3. -Токарный автомат включает корпус 1, расположенный и жестко закрепленный между магазином 2 и барабаном 3 (фиг. 1). В корпусе 1 на осях 4 и 5 (фиг. 4) посажены качающиеся нижний 6 и верхний 7 рычаги, в которых на равных расстояниях от осей качания 4 и 5 установлены, шестерни 8 и 9 (фиг. 1), в торце каждой из которых встроены по две оси 10, 1 и 12, 13 с насаженными на них д: оликами 14, 15 и 16, 17, спаренные между собой зуватыми венцами 18, 19 (фиг. 2} и 20, 21 (фиг. 3), точки контакта которых проходят через оси соответствующих естерен 8 и 9.
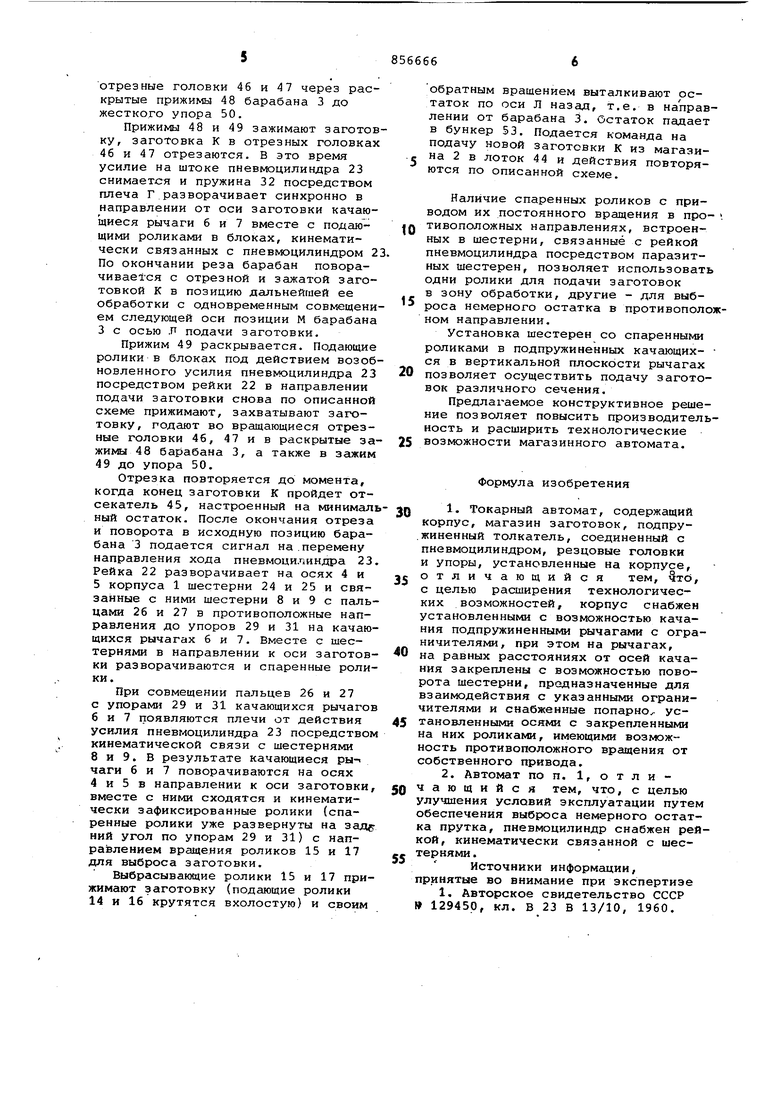
Шестерни 8 и 9 кинематически связаны с рейкой 22 (фиг. 2) пневмоцилиндра 23 посредством паразитных шестерен 24 и 25, посаженных соответственно на оси 4 и 5 корпуса 1, а пальцы 26 и 27, установленные на шеерернях 8 и 9, входят в контакт с упорами 28, 29 или 30, 31, закрепленными соответственно на качающихся рычагах 6 и 7 (фиг. 3), Малое плечо Г (фиг. 1) верхнего качающегося рычага 7связано пружиной 32 с корпусом 1. Подвод привода 33 (фиг. 2) к спаренным роликам 14 и 15 осуществляется через нижний качающийся рычаг 6 непосредственно валиком 34 (фиг. 4) с зубчатым венцом Д (фиг. 2), установленным на подшипниках 35 и 36 (фиг. 2) соосно в корпусе шестерни 8 и входящим в контакт с венцом шестерни Е ролика 14. Передача вращения верхним спаренным роликам 16 и 17 производится посредством шестерни 37 (фиг. 4), закрепленной на валике 34 нижнего рычага 6, паразитных шестерен 38 и 39 (фиг. 4), связанных с шестерней 40 (фиг. 4), жестко закрепленной на валике 41 (фиг. 3 и 4) верхнего рычага 7.
Валик 41 установлен в корпусе шестерки 9 на подшипнике 42 (фиг. 3). Зубчатый венец валика 41 (фиг. 3) входит в контакт с венцом шестерни И ролика 16.
В задней части магазина 2 установлен передвижной толкатель 43 (фиг. 1) с пневматическим приводом.
Вдоль магазина.по нижней части лотка 44 (фиг. 1) установлен передвижной отсекатель 45 (фиг. 2) контроля конца заготовки К. В передней части кбрпуса 1 по оси Л подачи заготовки установлены передвижные вращающиеся отрезные головки 46 и 47 (фиг. 2). Между отрезными вращающимися головками 46 и 47 расположен регулируемый по длине барабан 3 (фиг.1) оси М позиции которого совпадают с осью Л подачи заготовки.
Непосредственно на каждой позиции барабана 3 закреплены механические захваты 48 (фиг. 1) с пневматическим дистанционным приводом. Механический обхват 49 (фиг. 4) установлен стационарно по оси Л подачи заготовки К перЬд вращающейся.отрезной головкой 46 с пневматическим дистанционным приводом.
За отрезной головкой 47 (фиг. 2): по оси Л подачи заготовки К установлен передвижной упор 50 (фиг. 1).
Токарный автомат работает следующим образом.
Длинномерные заготовки или остатки К загружают в магазин 2,. откуда ,
они последовательно поступают в лоток 44. Из лотка 44 заготовка К подается толкателем 43 в зону обработки. В начале цикла спаренные ролики 15, 14 и 16,17 вместе с качающимися рычагами 6 и 7 под действием пружины 32 раскрыты от оси на резмер толщины заготовки К плюс определенный двухсторонний зазор. Спаренные ролики 14, 15 на рычаге 6 и 16,П на рычаге 7 постоянно вращаются, при этом в парах они вращаются в разных направлениях. Вращение передается от привода 33 в нижнем качающемся рычаге 6 на валик 34, связанный зубчатым венцом Д с венцом шестерни Е ролика 14, спаренного с роликом 15, а в верхнем качающемся рычаге 7 вращения спаренным роликам 16 и 17 передается от шестерни 37 посредством паразитных шестерен 38 и 39 на шестерню 40 (параметры которой идентичны шестерне. 37), далее валику 41 с зубчатым венцом Ж, связанному с зубчатым венцом И ролика 16, спаренного с роликом 17.
Под действием пневмоцилиндра 23 с направлением действия на подачу заготовки К рейка 22 разворачивает шестерни 24 и 25 на осях корпуса 1, которые, в свою очередь, разворачивают шестерни 8 и 9 с пальцами 26 и 27 в посадочных отверстиях 51 и 52 качающихся рычагов 6 и 7 до упоров 28 и 30. Вместе с шестернями 8 и 9 в направлении к оси заготовки разворачиваются и спаренные ролики. При окончании совмещения пальцев 26 и 27 с упорами 28 и 30 рычагов 6 и 7 и дальнейшем ходе пневмоцилиндра 23 с рейкой 22 усилие передается через пальцы 26 и 27 упорами 28 и 30.
Развиваемое усилие от пневмоцилиндра 23 превышает усилия пружины 32, а плечо Г - расстояние от точки действия пружчны до оси 5 - меньше плеч, появляющихся от действия усилия пневмоцилиндра, передаваемого кинематической цепью с приложением этого усилия посредством пальцев 26 и 27 упорам 28 и 30 или 29 и 31 и соответственно качающимся рычагам 6 и 7 на осях 4 и 5 корпуса 1. В результате качающиеся рычаги синхронно поворачиваются на осях 4 и 5 в направлении к оси заготовки Л. Вместе с качающимися рычагами 6 и 7 сходятся к оси заготовки Л и кинематические зафиксированные спаренные ролики 14, 15 и 16, 17, развернутые пневмоцилиндром 23 на заданный угол до упоров 28, 30, с вращением роликов 14 .и 16 в направлении подачи заготовки. Подающие ролики 14 и 16 прижимают заготовку (выталкивающие ролики 15 и 17 крутятся вхолостую) и своим вращением проталкивают заготовку по оси подачи Л в раскрытый прижим 49, далее через вращающиеся
отрезные головки 46 и 47 через раскрытые прижимы 48 барабана 3 до жесткого упора 50.
Прижимы 48 и 49 зажимают заготовку, заготовка К в отрезных головках 46 и 47 отрезаются. В это время усилие на штоке пневмоцилиндра 23 снимается и пружина 32 посредством плеча Г разворачивает синхронно в направлении от оси заготовки качающиеся рычаги 6 и 7 вместе с подающими роликами в блоках, кинематически связанных с пневмоцилиндром 23 По окончании реза барабан поворачивается с отрезной и зажатой заготовкой К в позицию Дсшьнейшей ее обработки с одновременным совмещением следующей оси позиции М барабана
3с осью Л подачи заготовки.
Прижим 49 раскрывается. Подающие ролики в блоках под действием возобновленного усилия пневмоцилиндра 23 посредством рейки 22 в направлении подачи заготовки снова по описанной схеме прижимают, захватывают заготовку, подают во вращающиеся отрезные головки 46, 47 и в раскрытые зажимы 48 барабана 3, а также в за1жим 49 до упора 50.
Отрезка повторяется до момента, когда конец заготовки К пройдет отсекатель 45, настроенный на минимальный остаток. После окончания отреза и поворота в исходную позицию барабана 3 подается сигнал на .перемену направления хода пневмоцилиндра 23. Рейка 22 разворачивает на осях 4 и
5корпуса 1 шестерни 24 и 25 и связанные с ними шестерни 8 и 9 с пальцами 26 и 27 в противоположные направления до упоров 29 и 31 на качающихся рычагах 6 и 7. Вместе с шестернями в направлении к оси заготовки разворачиваются и спаренные ролики.
При совмещении пальцев 26 и 27 с упорами 29 и 31 качающихся рычагов
6и 7 появляются плечи от действия усилия пневмоцилиндра 23 посредством кинематической связи с шестернями
8 и 9. В результате качающиеся рычаги 6 и 7 поворачиваются на осях
4и 5 в направлении к оси заготовки, вместе с ними сходятся и кинематически зафиксированные ролики (спаренные ролики уже развернуты на угол по упорам 29 и 31) с направлением врглцения роликов 15 и 17 для выброса заготовки.
Выбрасывающие ролики 15 и 17 прижимают заготовку (подающие ролики 14 и 16 крутятся вхолостую) и своим
обратным вращением выталкивают остаток по оси Л назад, т.е. в направлении от барабана 3. Остаток падает в бункер 53. Подается команда на подачу новой заготовки К из магазина 2 в лоток 44 и действия повторяются по описанной схеме.
Наличие спаренных роликов с приводом их постоянного вращения в про- .
тивоположных направлениях, встроенных в шестерни, связанные с рейкой пневмоцилиндра посредством паразитных шестерен, позволяет использовать одни ролики для подачи заготовок в зону обработки, другие - для выброса немерного остатка в противоположном направлении.
Установка шестерен со спаренными роликами в подпружиненных качающих- ся в вертикальной плоскости рычагах
позволяет осуществить подачу заготовок различного сечения.
Предлагаемое конструктивное решение позволяет повысить производительность и расширить технологические
возможности магазинного автомата.
Формула изобретения
1. Токарный автомат, содержащий корпус, магазин заготовок, подпру.жиненный толкатель, соединенный с пневмоцилиндром, резцовые головки и упоры, установленные на корпусе,
отличающийся тем, что, с целью расширения технологических возможностей, корпус снабжен установленными с возможностью качания подпружиненными рычагами с ограничителями, при этом на рычагах,
на равных расстояниях от осей качания закреплены с возможностью поворота шестерни, предназначенные для взаимодействия с указанными ограничителями и снабженные попарно, установленными осями с закрепленными На них роликами, имеющими возможность противоположного вргадения от собственного привода,
2. Автомат по п. 1, отличающийся тем, что, с целью улучшения условий эксплуатации путем обеспечения выброса немерного остатка прутка, пневмоцилиндр снабжен рейкой, кинематически связанной с шестернями.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 129450, кл. В 23 В 13/10, 1960.
« « I ,V f / / WW M /(7 /
/r
41 /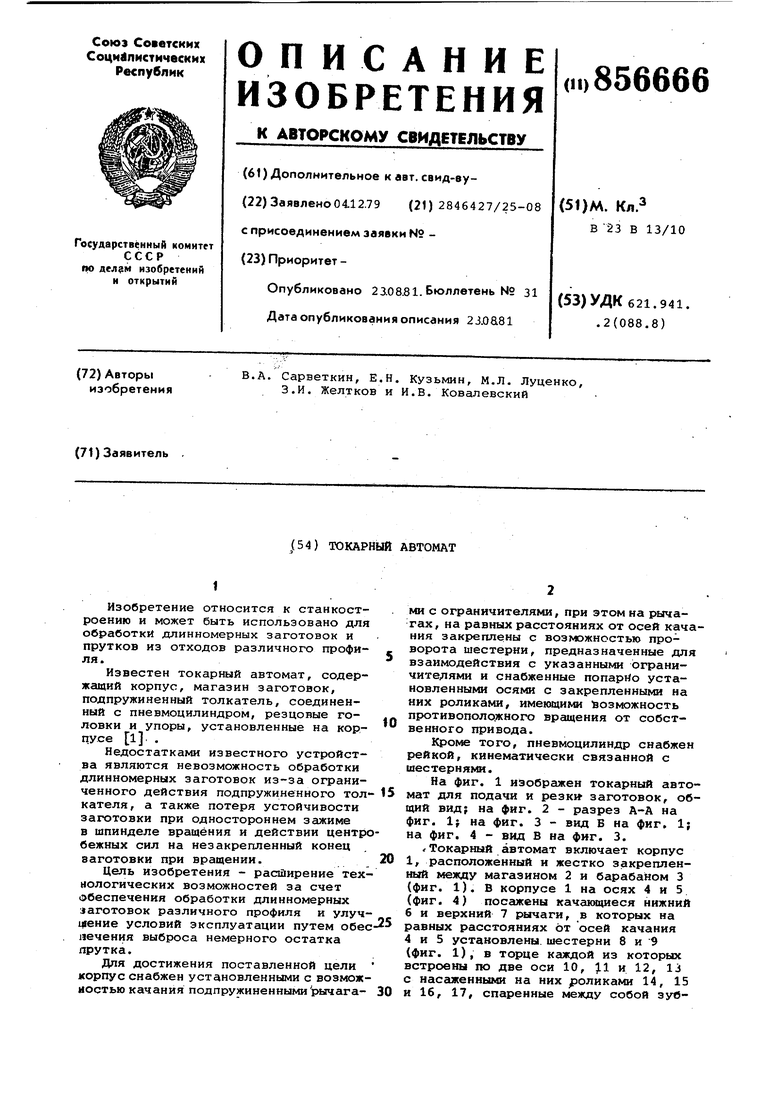
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат для упаковки катушек с нитками в пачки | 1958 |
|
SU118015A1 |
| АБРАЗИВНО-ОТРЕЗНОЙ ПОЛУАВТОМАТ | 1971 |
|
SU306689A1 |
| Устройство съема и передачи деталей на токарном автомате | 1989 |
|
SU1712126A1 |
| АВТОМАТ ДЛЯ КОПИРОВАЛЬНОГО ГРАВИРОВАНИЯ | 1948 |
|
SU85361A1 |
| Автомат для насекания надфилей | 1979 |
|
SU772760A1 |
| Грейферное подающее устройство | 1983 |
|
SU1138213A1 |
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ЗАГОТОВОК ИЗДЕЛИЙ ИЗ КОМПОЗИЦИОННЫХ МАТЕРИАЛОВ | 1993 |
|
RU2065833C1 |
| Автомат для сгибания фигурных изделий | 1981 |
|
SU963646A1 |
| АВТОМАТ ГОРЯЧЕВЫСАДОЧНЬШ ДЛЯ ИЗГОТОВЛЕНИЯ ФАСОННЫХ ДЕТАЛЕЙ, НАПРИМЕР ГАЕК | 1965 |
|
SU176476A1 |
| Цепевязальный автомат | 1990 |
|
SU1776198A3 |
Отрезная
Ролики развернуть
