1
Изобретение относится к области релейных регулирующих устройств автоматики, а именно к регуляторам замкнутых систем с кусочно-постоянным управлением, обеспечивающим изме-5 нение знака управляющего воздействия при состояниях системы, определяемых в фазовом пространстве гиперповерхностями переключения.
Известны регуляторы замкнутых сис-Ю тем, осуществляющие управление в К интервалов постоянства управления при полной информации о состоянии объекта, в которых К входов через функциональные преобразователи и бло-15 ки умножения через cyiviMaTop- соединены с реле 1 .
Недостатком данного регулятора является сложность аппаратурной реализации, обусловленная необходимостью 20 получения информации для всех К входов регулятора.
Наиболее близким к предлагаемому изобретению является релейный регулятор с кусочно-постоянным управле- 25 нием в к интервалов, содержащий последовательно соединенные блок сигнатуры и блок умножения и последовательно соединенные блок определения модуля и блок запоминания максимума, 30
2
выход которого через соответствующие последовательно соединенные преобразователь координат, первый блок сравнения и первое реле соединен с соответствующим вторым входом блока умножения, вход блока сигнатуры соединен со входом блока определения модуля, а также блок обнуления, выход которого соединен со вторым входом блока запоминания максимума, а выход блока определения модуля соединен со вторыми входами первых блоков сравнения 2 .
К недостаткам известного регулятора относится то, что в системах управления с указанным регулятором при действии помех и возмущений возможны срывы процессов приведения. Синтез управления в системах осуществляется на основе измеряемой переменной состояния и априорной информации, заложенной в регулятор в виде П-функций функций предсказания переключений. При синтезе П-функций априорная информация о состоянии объекта учитывается для определенных условий управления, например, при определенных величинах помех и возмущений. Несоответствие условий работы регулятора условиям, положенным для расчета П-фуиК ций, приводит к нарушениям оптимальности процесса. В определенных случаях эти нарушения могут привести к срыву процесса приведения, выражающемуся в том, что фазовое состояние объекта переводится в область, не содержащую конечной точки приведения, и удерживается в этой области неопрецеленно долгое время, что уменьшает точность регулятора.
Цель изобретения - обеспечить защищенность системы управления от действия помех и возмущений для повышения точности регулятора.
Для этого регулятор содержит элемент ИЛИ, счетчики времени и последовательно соединенные функциональный преобразователь, второй блок сравнения, второе реле и элемент И, выход блока запоминания максимума соединен со входами функциональных преобразователей, вторые выходы первых реле соединены через соответствующие элементы И с соответствующими первыми входами элемента ИЛИ, выход которого через блок обнуления соединен с первыми .входами счетчиков времени, вторые входы которых соединены с выходами соответствующих первых реле, а выход блока сигнатуры соединен со вторым входом элемента ИЛИ.
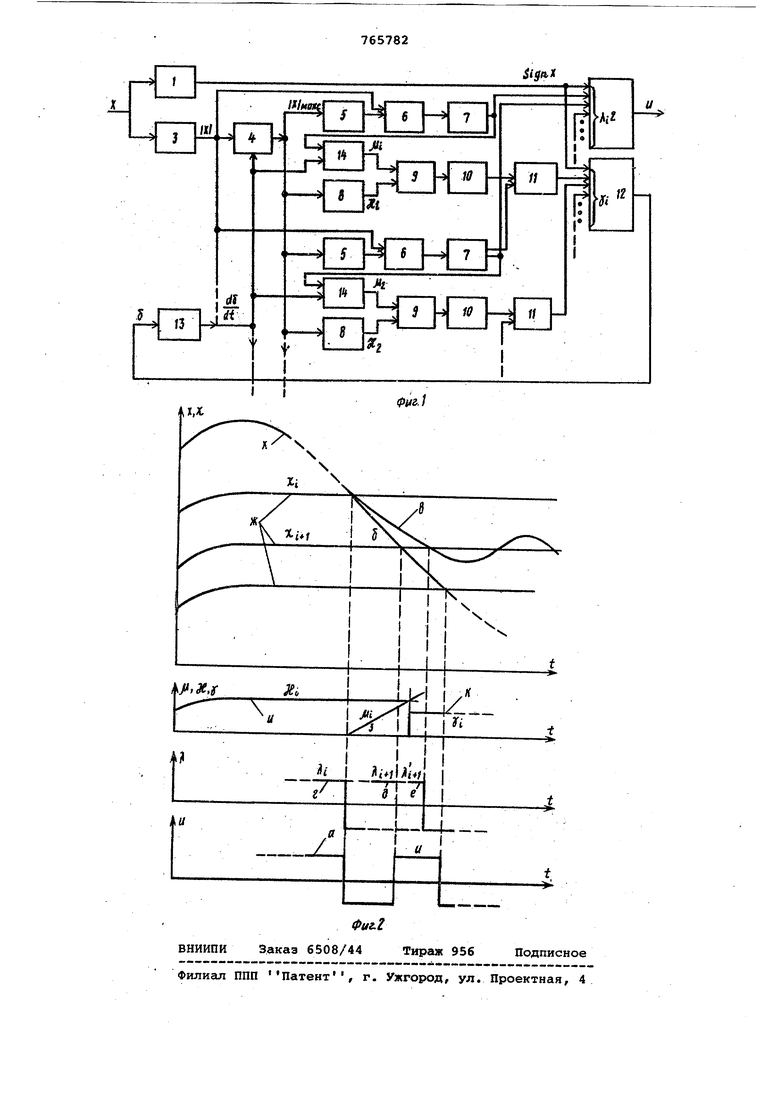
На фиг. 1 представлена структурна схема регулятора; на фиг. 2 - кривые характеризующие процессы в регуляторе ..
Регулятор состоит -из последовательно соединенных блока сигнатуры 1 и блока -умножения- 2 и последовательн соединенных блока 3 определения модуля и блока 4 запом инания максимума, выход которого через соответствующие последовательно соединенные преобразователь 5 координат, первый блок сравнения б и первое реле 7 соединен с соответствующим вторьм входом блока умножения 2. Вход блока сигнатуры 1 соединен со входом блока 3 определения модуля. Выход блока 3 определения модуля соединен также со вторыми входами первых блоков сравнения 6. Выход блока запоминания максимума соединен также со входами функциональных преобразователей 8, последовательно с каждым из которых соединены второй блок сравнения 9, второе реле 10 и элемент И 11, выход которого соединен с соответствующим первым входом элемента ИЛИ 12, со вторым входом которого соединен выход блока сигнатуры 1. Выход элемента ИЛИ 12 соединен со входом блока обнуления 13, выход которого соединен со вторым входом блока 4 запоминания максимума и с первыми входами счетчиков времени 14, вторые входы которых соединены с выходами соответствующих первых реле 7. Вторые выходы первых реле 7 Соединены совходами соответствующих
элементов И 11. Вьлходы счетчиков времени 14 и выходы функциональных преобразователей 8 соединены с первый и вторым входами соответствующих вторых блоков сравнения 9. . J Управляющее воздействие U (см. фиг. 2,а) формируется регулятором в .тветствии с зависимостью
U -signX..(lxi-x), (fl)
Q где X - измеряемая переменная состояния системы, поступающая на вход регулятора (см. фиг. 2, кривые б и, в).
Сигнал Sign X формируется в блоке
f сигнатуры 1. Сигналы Sign (lX|-JC), ;Обозначенные на фиг. 1 через Д, (см. фиг. 2, г,-д, е) формируются, в первых блоках сравнения бив первых реле 7. Сигналы Х- - абсолютные значения координат переключения (см. фиг.2,ж)
определяются выражениями
}TlKU 0 при Sign X Sign X. (2) М1к1мо.исГ при Sign X -Sign х (3) О npHdfi/dt 0 (4) где функции Пц{- (П-функции) - предсказания координат переключения в зависимости от экстремального значения измеряемой переменной X. Сигналы jCj реализуются в блоках 3 определения модуля, блоках 4 запоминания максимума и в преобразователях 5 координат.
В рассматриваемом алгоритме сигнал обнуления информации поступает с выхода блока обнуления в момент, 5 когда 0 . Сигнал 5 , который формируется в элементе ИЛИ 12, определяется выражением
(5) ки
S Ди5 п11хЬх,,)((.,1,
где 111 - сигнал с выхода I -го счетчика времени 14; 26 - сигнал с выхода i-го функционального преобразователя 8 (см. фиг.2, 3, и). Сигналы и эе,- определяются выражениями
rift
-|j 6i nllxl-x Vl dt приЦ-О ь о
0 (
при (Т)
.0
тт.дип
при 6 gnXrS4 nX (В)
при &AgnX -signX (9)
ii V мокс
эе
AS при (loV
о
функция ri| - функция предсказания 0 контрольного интервала времени постоянства управления, вычисляемая априорно и определяющая контрольную длительность интервалов знакопостоянства управления в функции экстремума измеряемой переменной состояния.
Изменение сигнала( йЛ )i iSign(nij- ejflo6o3Ha4eHHoro на фиг. 1 через yj (см. Фиг. 2 к), происходит в том случае, если изменение сигнала у с вьгхода второго реле 10 происхо дит раньше, чем изменение сигнала A с выхода реле 7. Программа переключений реализует оптимальный переходный процесс при отсутствии неучтенных возмущений (см. фиг. 2 б). При действии неучтенных возмущений возможны срывы процессов приведения. Срывы процессов приведения возникают в случаях, когда скорость изменения измеряемой переменной состояния становится меньше скорости изменения той же переменной для оптимального процесса (см. фиг. 2 в). В этих случаях возможен перевод фазового состояния объекта в область, не содержащую конечной точки приведения, и удержание в этой области неопределенно долгое время.
Для исключения приведения фазового состояния объекта в область, не содержащую конечной точки приведения, введен контроль времени знакопостоянства управления-на всех интервалах, позволяющий сравнить среднюю скорость процесса на интервалах со скоростью изменения той же переменной оптимального процесса. Если в процессе приведения время знакопостоянства управление на любом интервале превышает контрольный интервал времени, определяемый через функции предсказания времени, то происходит изменение величины t -S(gn(Ixl-Xi)J Usign ( - ) , входящей в выражение (5), формируется импульс обнуления информации (по сигналу с выхода элемента ИЛИ 12), который приводит регулятор в исходное состояние, и процесс приведения повторяется, причем начальными условиями для определения новой программы переключений являются текущие условия процесса приведения.
Использование предлагаемого регулятора в замкнутых системах с кусочно-постоянным управлением позволяет обеспечить эбидищенность системы при шумах измерения переменной состояния, при действии на объект возмущений, при действии помех в тракте регулятора, при инструментальных погрешностях реализации гитгоритма управления в регуляторе.
Формула изобретения
Релейный регулятор, содержащий последовательно соединенные блок сигнатуры ii блок умножения и последовательно соединенные блок определения модуля и блок запоминания максимума, выход которого через соответствующие последовательно соединенные преобразователь координат, первый
блок сравнения и первое реле соединен с соответствующим вторым входом блока умножения, вход блока сигнатуры соединен со входом блока определения модуля, а также блок обнуления,
выход которого соединен со вторым входом блока запоминания максимума, а выход блока определения модуля соединен со вторыми входами первых блоков сравнения, отличающ и и с я тем, что, с целью повышения точности регулятора, он содержит элемент ИЛИ, счетчики времени и последовательно соединенные функциональный преобразователь, второй блок сравнения, второе реле и элемент И, выход-блока запоминания максимума соединен со входами функциональных преобразователей, вторые выходы первых реле соединены через соответствующие элементы И с соответствующими первыми входами элемента ИЛИ, выход которого через блок обнуления соединен с первыми входами счетчиков времени, вторые входы которых соединены с выходами соответствующих первых реле, а выход блока сигнатуры соединен со вторым входом элемента ИЛИ.
Источники информации, принятые во внимание при экспертизе 1. Павлов А.А. Синтез релейных
систем, оптимальных по быстродейст- . ВИЮ. М., Наука, 1966, с.214-216.
2. Авторское свидетельство СССР 283354, кл. G 05 В 17/00, 03.02.69 (прототип) .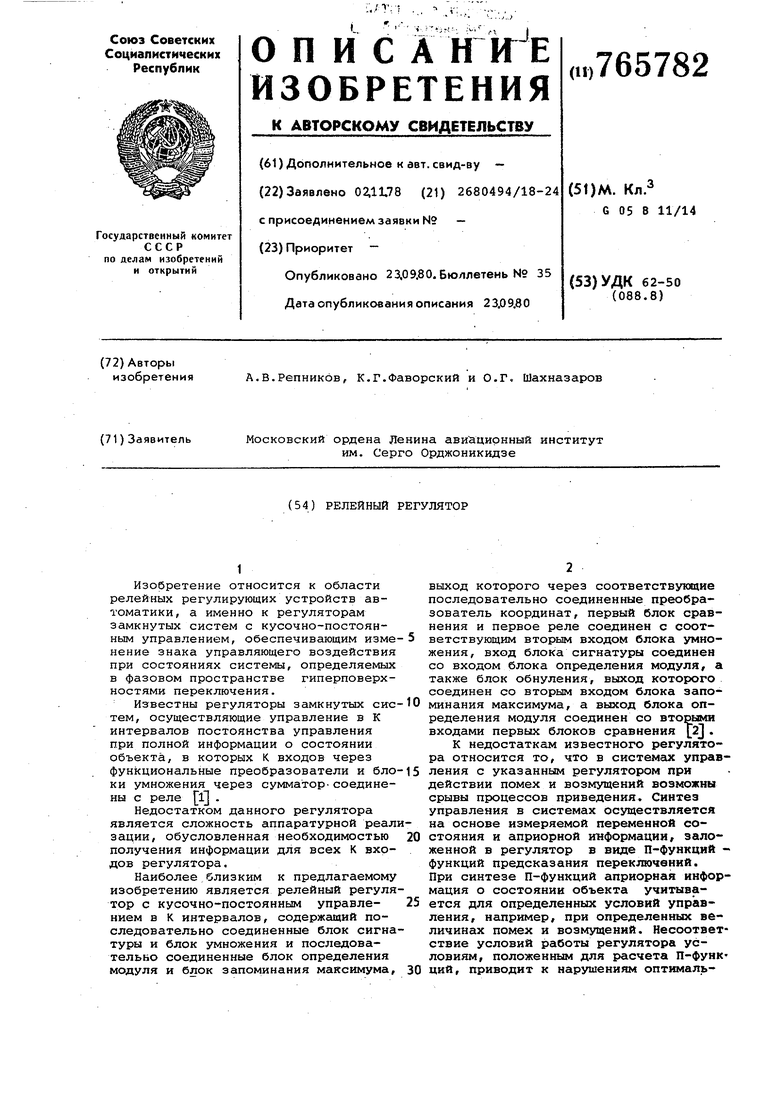
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейный регулятор | 1979 |
|
SU857929A1 |
| Релейный регулятор | 1980 |
|
SU900258A1 |
| Релейный регулятор | 1980 |
|
SU900257A1 |
| Релейный регулятор | 1980 |
|
SU885971A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| Бесконтактный следящий привод постоян-НОгО TOKA | 1979 |
|
SU853606A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2005 |
|
RU2284561C1 |
| Самонастраивающаяся система комбинированного регулирования | 1986 |
|
SU1339494A1 |
| Релейно-линейный регулятор | 1981 |
|
SU1012200A1 |
| Способ приведения главной оси гирокомпаса в меридиан | 1990 |
|
SU1728662A1 |