to
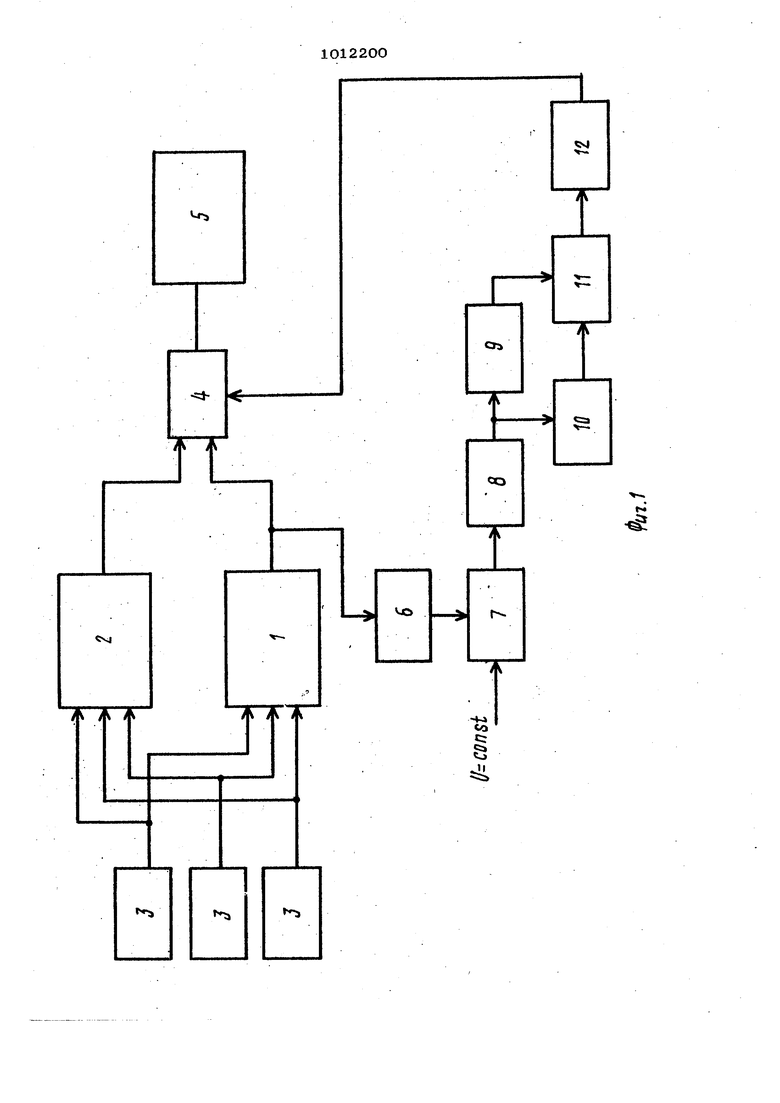
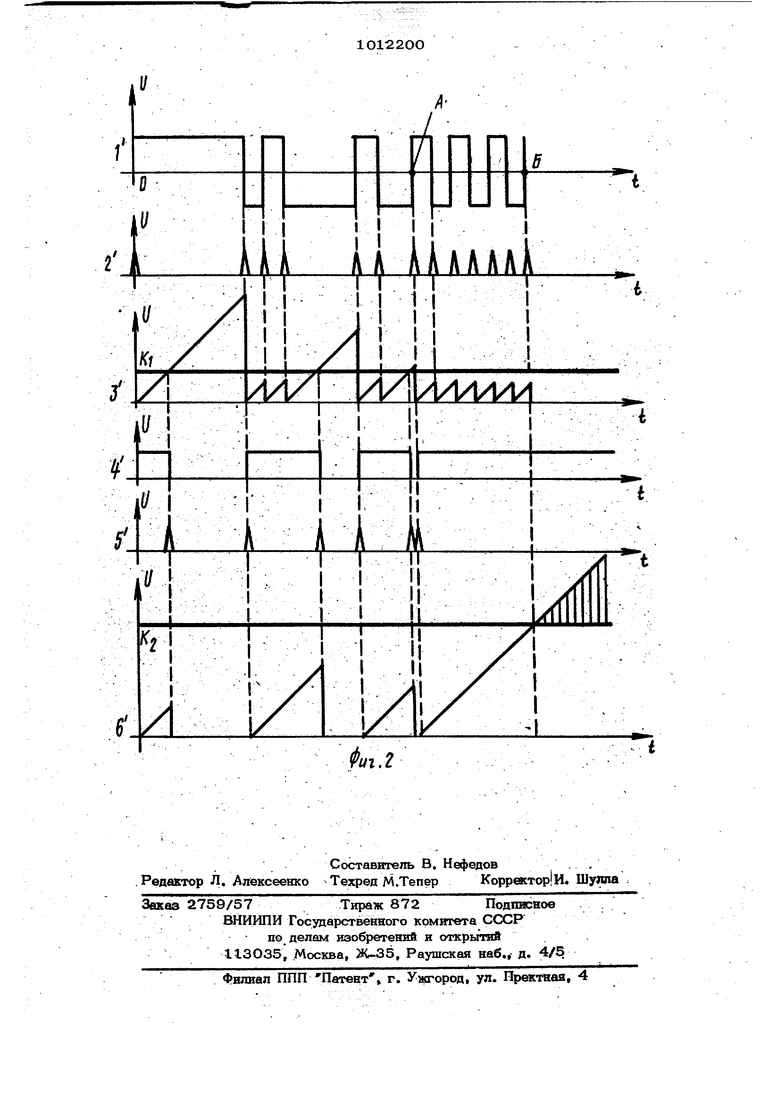
Nd 1 Изобретеяие относится к регулирующи устройствам автоматики, в частности к оптимальным системам управления. Известен релейный регулятор, обеспечивающий оптимальное, например, по быстродействию, управление при переводе состояния объекта из одной точки в другую . Недостатком известного регулятора являются наличие в режиме стабилнзашш автоколебаний. Известен линейный регулятор, обеспе чиваЬщий отсутствие автоколебаний в режиме стабилизации состояния объекта в окрестности точки щэиведения 2j. Недостатком линейного регулятора яв ляется неудовлетворителыгое быстродейс вие. Совмещение регуляторов релейного, ис пользуемого в переходном режиме, и лииейного Б режиме стабилизации обеспечивает качество переходного процесса, эффективность фильтрации помех и парирование возмущений. Наиболее близким к пpeдлaгaетv oмy является релейно-линейный рюгулятор, со держащий последовательно соединенные релейный регулятор, переключающее устройство и исполнительное устройство, причем каждый вход релейного регулятора соединен с выходом соответствукяцего датчика состояния объекта и с соответст вующим входом линейного регулятора, выход которого подключен к второму вхо ду переключающего устройства Sj, Недостатком известного регулятора является то, что для объекега fi -го порядка на основании информации, поступающей с К датчиков, без применения наблюдателей невозмо кно аппаратурно реали зовать замкнутую область вокруг конечно точки 1фиведения к фиксировать попадание точки, определяющей состояние объек та, в .эту область. В случае, если К « Я или при применении наблюдателе f 2 такая область реализуется по сигналам датчиков устройствами, в которых опре(деляются соотнощения (; X i I О-i , где - сигнал с 1 -го датчика, а| хтраница зоны по сигнал5 Реализация таких операций усложняется из-оа того, что работе протекает при малых уровнях полезных сигналов и большом уровне помех. Поэтчэму величины а | опр деляются не величиной желаемой зоны,; авеличиной помех. Цель изобретения - повышение точное ти и надежностирешейно-лвнейного регулятора. ОО2 Поставленная цель достигается т, что регулятор соаержит селектор сигналов и послэдовагельно соециненные первое дифференцирующее устройство, первый интегратор, первый компаратор, второе дифф енцирующее устройство, второй интегратор и второй компаратор, подключенный выходом к управляющему входу переключакядего устройства, первый вход которого соединен с входом первого : дифференцирующего устройства, вход селектсфа сигналов подключен к выходу первого компаратора, а выход - к второму вхоцу второго интегратора. 1На фиг. I представлена блок схема i предлагаемого регулятора; на фиг. 2 графики процессов в блоках системы. Система состоит из релейного регулятора I, линейного регулятора 2, датчиков 3 состо5гаия объекта, переключающего устройства 4, исполнительного устройства 5,первого дифференцирующего устройства 6,первого интегратора 7, первого компаратора 8, второго дифференцирукидего уст ройства 9, селектора Ю сигналов, второго интегратора II и второго компаратора 12. Объект управления яшляется у -мерным, и для измерения его состояния регулятор содержит К датчиков 3 состояния объекта. Первые входы интеграторов 7 и 11 являются обнуляющими. Регулятор работает следующим образом. Оптимальный переходный процесс в ойцем случае должен протекать в Ц интервалов знакопостоянства управления (теорема об Я интервалах) релейного регулятора и выйти затем на автоколебательнь1й цикл. Работа схемы основана на том, что длительность интервалов знакопостоянства управления зависит от начальных условий процесса приведения. Ч&л меньше состояние объекта отличается от состояния, определяетлого конечной точкой приведения, тем меньше время каждого из У интервалов оптимального 1фиведения, а при увеличении рассогласования между начальной и конечной точками, время хотя бы одного любого интервала. увеличиваться. Поэтому, оценивая время каждого из И интервалов, можно оценить удаленность состояния объекта от конечной точки приведения, т. е. задать область в у -мерном пространстве, при попадании в которую целесообразно переключать управление на инейное. 310 На фиг. 2 показаны графики, сигналов. Цифрой I помечен выходной саигнал релейного регулятора. От момента О до момента А показано изменение управлякяцего ригнала, обеспечивающего п еходной ре«КИМ, от момента А до момента Б пока.зано изменение управлякяцего сигнала, обеспечивающего автоколебательный режим стабилизации.. Вьпсодной сигнал релейного регулятора I дн{)ференцируется уст,ройством 6 импульсы, снимаемые с уст- ;,ройства 6 ( на фиг. 2 помече1ы цифрой 2 ), подаются на обнуляющий вход дастегратора 7, на другой вход которого подается постоянное напряжение. При этом выходной сигнал интегратора 7 имеет пилообразную форму, момент окончания нарастания которой определяется моментом при хода импульса с устройства 6 (график 3 фиг. 2). Напряжение, снимаемое с ин тегратора, сравнивается с постоянным напряжением К в первом компараторе 8. Селектор IО отрицательных сигналов, который может быть реализован диодом, пропускает только отрицательные сигналы .(график 4, фиг. 2) . на вход второго интегратора II. В моменты изменения амплитуды первого компаратора 8 на обнуляющий вход интегратора поступают импульсы (график 5 ),снимаемые с устройства 9. Напряжение с второго интегратора 11 достигает уровня напряхсбния К, заложенного во втором компараторе 12, только при условии, что с пер вого компаратора 8 поступает отрицатель ный сигнал в течение периодов автоколебаний. В момент Б, когда изменяется напряжение на втором компараторе 12, переключающее устройство 4 переключает исполнительное устройство на работу от линейного регулятора. Времена ин.тервало& могут быть-раэнь и, но в случае, когда точка, определяющая состояние объекта, попадает в область автоколебательного цикла, длительность каждого из януервалов знакопостоянства управления не должнр намного превьпиать велй 004/ чину полуперирда автоколебаний. Первый ингегратрр 7 и первый компаратор 8 otfpeделякуг , что длительность интервала знакопостоянства управления мало превышйет полупериод колебаний. Из этого условия выбирается величина напряжения К . Для того, чтобы переходный процесс закончился, а не несколько интервалов управления подряд прошли с малой длительностью, необходимо, чтобы количество интервалов с длт-епьностью, опреде ляемой полупериодом колебаний, былобольше И . Это определяется вторым ининтегратором II и вторым компаратором 12. Из этого условия выбирается величина напряжения K,t. Повышение точности достигается за счет того, что информация о состоянии объекта переводится во временную 6бласть, что позволяет судить о состоянии объекта в ц -мерном пространстве, тогда как прототип способен оценить состояние лишь в и - ерном пространстве по к измеряе1,№1м иеременньм состояния. Переход во временную область повышает так же помехозащитность системы, так как аддитивные помехи датчиков уже фильтруются в релейном регуляторе, и интеграторы не вносят дополнительных помех. Для устранения ложных переключений релейного управления перед диффереширующим устройством 6 может быть помдщен фильтр высоких частот. Для аппаратурной реализации предложенной требуется меньше элеь ентоЕ, чем на peaяизацию К устройств определения модуля сигналов, измеряемых К датчикакш, К компараторов, для сравнения амплитуд сигналов и построения логического устройства, обрабатывающего сигналы компараторов. Использование изофетения позволяет снизить затраты на его производство и повысить экономичность регулятора в эксплуатации. .,
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейный регулятор | 1979 |
|
SU857929A1 |
| Релейный регулятор | 1980 |
|
SU885971A1 |
| Экстремальный регулятор | 1981 |
|
SU974340A1 |
| ТРЕХФАЗНЫЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ С ЗАЩИТОЙ | 2012 |
|
RU2499347C1 |
| Устройство для направления электрода по стыку | 1979 |
|
SU856708A1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |
| МНОГОЗОННЫЙ ИНТЕГРИРУЮЩИЙ РЕГУЛЯТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2011 |
|
RU2471282C1 |
| МНОГОЗОННЫЙ РАЗВЕРТЫВАЮЩИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ ПЕРЕДАЧИ ЛОГИЧЕСКИХ ДАННЫХ ПО ОДНОПРОВОДНОЙ ЛИНИИ СВЯЗИ | 2001 |
|
RU2206922C2 |
| Устройство для дифференцирования медленно изменяющихся сигналов | 1981 |
|
SU993279A1 |
| УСТРОЙСТВО СИНХРОНИЗАЦИИ | 2008 |
|
RU2383985C1 |
РЕЛЕЙНО-ЛИНЕЙНЫЙ РЕГУЛЯТОР, содержащий последовательно соединенные релейный регулятор, переключак) щее устройство и исполнительное уст1ройст-. ,во, причем каждый вход релейного регулятора соединен с выходом соответствующего датчика состояния объекта и с соответствующим входом линейного регулятора, выход которого подключен к второму входу перзключакяцего устройства, отличающийся тем, что, с целью повышения точности и надежности релейнолинейного регулятора, он содержит селектор сигналов и последовательно соединенные первое дифференцирукяцее устройство, первый интегратор, первый компаратор, второе ди})фёренцирующеё устройство, второй интегратор и второй компаратор, подключенный выходом к управшюшему входу переключакяцего устройства, первый вход которого соединен с входом первого дифференцирующего устройства, вход : селектора сигналов подключен к выходу первого компаратора, а выход - к второму входу второго интегратора.
ь i
л п
А м м
-
-:
на
Со
«5
S
| I | |||
| Репников А | |||
| В | |||
| Колебания в оптимальных системах автоматического регулирования | |||
| М., Машиностроение, 1.968. | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Линейные оптимальные системы управления | |||
| M,,M«p 1977 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |
