Изобретение относится к регулирующим устройствам автоматики, к оптимальным релейным системам управления, а также к регуляторам замкнутых систем с кусочно-постоянным управлением, обеспечивающим изменение знака управляющего воздействия при состоянии системы, определяемых гиперповерхностями переключений.
Известен оптимальный регулятор для объекта и-го порядка, имеющий один датчик информации о переменной состояния, связанный через устройство определения модуля с устройством запоминания максимума, выход которого через соответствующий функциональный преобразователь связан с первым входом каждого из (п-1) компараторов, второй вход которых соединен с устройством определения модуля , причем выходы всех компараторов и устройства определения знака соединены с соответствующими входами устройства перемножения знака релейных сигналов, а выход соединен также со входом устройства определения знака, выход которого через дифференцирующее устройство соединен со входом обнуления устройства запоминания максимума 1 .
Наиболее близким к предлагаемому является регулятор, имеющий датчик переменных состояния и преобразователи системы координат, первый функциональный преобразователь и первый компаратор,, причем выходы всех датчиков переменных состояния связаны со входами всех преобразователей системы координат,выходы которых, первого
10 непосредственно, а последующих через первый функциональный преобразователь связаны с соответствующими входами первого компаратора 2.
Недостатком известного регулято15ра является то, что при изменении условий работы объекта управления нарушается оптимальность системы. Функционсшьный преобразователь регулятора рассчитывается при заданных
20 параметрах объекта управления и возмущений , Отклонения этих параметров от расчетных дают ошибку в определении моментов переключений и нарушение оптимальности регулятора.
25
Цель изобретения - повышение точности регулятора за счет получения оптимальных управлений при различных условиях работы объекта.
Поставленная цель достигается тем,
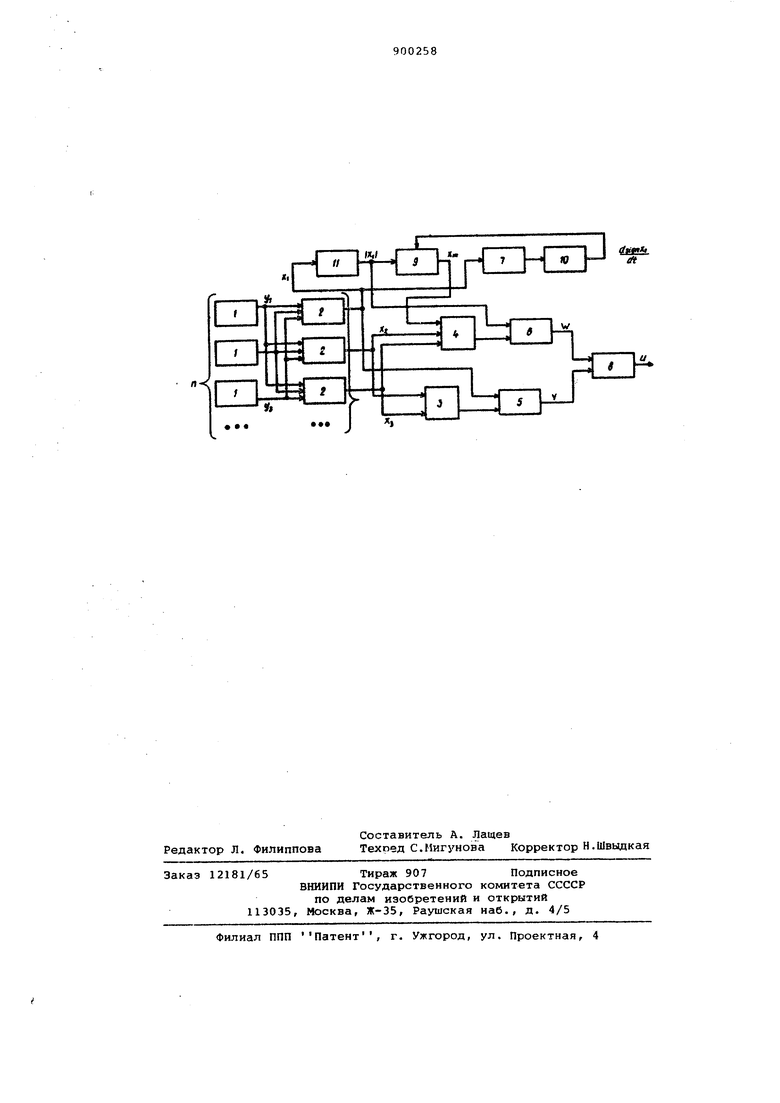
30 что в регулятор вводят второй фуикциональный преобразователь, второй компаратор, третий компаратор, устройство перемножения знаков релейных сигналов, устройство запоминани экстремума, дифференцирующее устрой ство и устройство определения модуля/ причем выход первого преобразователя системы координат соединен через устройство определения модуля со входом устройства запоминания экстремума и первым входом второго компаратора, а со входом третьего и первого компараторов нaпpя /Iyю, выходы последующих преобразователей си стемы координат соединены с соответствующими входами первого функционального преобразователя, первый вход которого связан с выходом устройства запоминания экстремума, а выход - со входом второго компаратора, выходы первого компаратора и вто рого комларатора связаны с соответствующими входами устройства перемножения знаков релейных сигналов, а выход третьего компаратора через дифференцирующее устройство связан со входом обнуления устройства запоминания экстремума. На чертеже изображена блок-схема регулятора. Регулятор включает и датчиков переменных состояния 1, п преобразователей системы координат 2, первый функциональный преобразователь 3, второй функциональный преобразовател 4, первый компаратор 5, второй компаратор б, третий компаратор 7, устройство перемножения знаков релейных сигналов 8, устройство запоминания экстремума 9, дифференцирующее устройство 10 и устройство опреде.пения модуля .11. Выходы всех датчиков 1 соединены с соответствующими входами всех преобразователей 2, выход первого преобразователя 2 соединен со входом устройства запоминания экстремума 9 и первым входом компаратора 6 через устройство определения модуля 11, а с первыми входами компараторов 7 и 5 напрямую. Выходы всех последующих преобразователей 2 связаны с соответствующими входами второго функционального преобразователя 4, и вхо дами первого функционального преобра зователя 3, первый вход преобразователя 4 связан с выходом устройства 9. Выход преобразователя 3 связан со вторым входом компаратора 5, а преобразователя 4 - со вторы входом компаратора б. Выходы компараторов б и 5 соединены со входами устройства 8, а компаратора 7 - через дифференцирующее устройство 10 со входом обнуления устройства 9. Каждый из преобразователей системы координат 2 реализует операцию Ч , Ч Vi где х - выходные сигналы преобразоватгзлей 2 ; yj - выходные сигналы датчиков 1. Устройство запоминания ма/симума 9 с компаратором 7, дифференцирующим устройством 10 и устройством определения модуля 11 формируют сигнал, определяемый выражением (/X,/ при sign X, sign х, 1х{1 max при sign х sign х, О .при о at где X tv - сггнал на выходе устройства 9. Обнуление запомненного сигнала х реализуется при значении х О компаратором 7 и устройством 10. Сигнал V на выходе компаратора 5 определяемся зависимостью V - signG , гдеб х, + f, (х , Xj . . .Х) , а функ,ция f, (Xi , Xj. ..Хц) реализуется в функциональном преобразователе 3. Сигнал W на выходе компаратора 8 определяется зависимостью W sigh f. , (/, + fj (х, xj,, X х„), функция г(Х;„, х, ) реализуется в функциональном преобразователе 4 . Устройство умножения знаков релейных сигналов 10 реализует операцию и V.W, где и - выходной сигнал устройства 10, определяющий знак управляющего воздействия системы управления. Регулятор реализует оптимальные управления при наличии одномерных возмущений или одномерной параметрической нестационарности объекта управления, т.е. в случаях, когда характеристики возмущений или измерения параметров объекта остаются постоянными или меняются во времени, причем разница между характеристиками может быть обоснована выбором одного чпоа из одномерного множества. Например, процесс управления может осуществляться при действии на объект синусоидального возмущения с определенной частотой и амплитудой, а начало процесса может приходиться На любое значение фазы возмущения, т.е. характеристики возмущений отличаются фазой начала процесса. Известный регулятор реализует (и-1) мерную гиперповерхность, переключения в и - мерном пространстве состояний. В рассматриваемом случае семейство гиперповерхностей оптимального переключения по одномерному изменению возмущений или параметров становится h-мерным и не может быть реализовано в и-мерном пространстве состояний для определения точек переключения. Для реализации второго и последующих переключений из (и-1)-го переключения оптимального управления гиперповерхностью оптимального переключения имеет размерность ( п -2 ) , а семейство таких гиперповерхностей объединяет в гиперповерхность размерности ( п - 1 ) . Это семейство может быть реализовано для определения точек второго и последующих переключений с помощью функционального преобразователя по зависимости 5 0. Так например, для объекта третьего порядка в известном регуляторе реализуется поверхность, состоящая из фазовых траекторий второго интер зала управления, проходящих через фазовую траекторию, включающую конечную точку приведения третьего интервала. В предлагаемом регуляторе реализуется поверхность, проходящая через множество фазовых траекторий третьего инт.ервала, которые отличаются между собой значением числа из одномерного изменения возмущений или параметров.
Для определения первого переключения и-мерное множество точек переключения расслаивают на одномерное многообразие (и-1)-мерных множеств по значению параметра , ,т.е., еси в процессе управления зафиксировано одно значение Xj, , то в и -мерном множестве точек переключения выбирают соответствующую значению . (и-1)-мерную гиперповерхность точек первого переключения. При другом значении параметры этой гиперповерхности первого переключения меняются. Гиперповерхность первого переключения oпpeдeJтяютcя как сумма областей точечного отображения области фиксируемого экстремума на гиперповерхности оптимального переключения, построенные для различных значений числа из одномерного изменения возмуэдений или параметров. Область фиксируемого экстремума х,„ах определяется как пространство (п-2)го порядка по признаку х,) Хтох t х О. Поэтому отображение этого пространства на гиперповер ;ность переключения будет (in-2)-мерное многообразие. Объединение этих областей по различным гиперповерхностям переключения по одномерному изменению возмущений или параметров даст гиперповерхность (и-1)-го порядка, которая может быть реализована зависимостью .
В регуляторе знак управляющего воздействия на первом интервале определяется сигналом V, при этом W + 1. Первое переключение осуществляется в момент, когда 3 О, которое реализуется за счет изменения знака сигнала W. Второе и последующие переключения реализуются в моменты Q О. Преобразователи системы координат ,2,преобразуют переменные состояния к кононическому нормальному базису, в котором передаточная функция относительно х не имее. нулей. В этом случае оптимальный переходной процесс по переменной х, монотонен и заканчивается при значении х 0. no3TONiy сигнал с компаратора 7 используется для приведения регулятора в исходное состояние за счет обнуления величин запомненных в устройстве 9.
Таким образом, без изменений параметров, определяющих режимы, или возмущений получают оптимальные управления при различных условиях работы объекта управления.
Формула изобретения
Релейный регулятор,содержащий датчики переменных состояния и преобразователи системы координат, первый функциональный преобразователь и первый компаратор, выходы всех датчиков переменных состояния связаны со входами всех преобразователей систе -.Ы координат, выходы которых, первого нпосредственно, а последующих через первый функциональный преобразовател связаны с соответствующими входами первого компаратора, о т л и ч а ющ и и с я тем, что, с целью повышения точности регулятора, в него введены второй функциональный преобразователь, второй компаратор, третий компаратор, устройство перемножения знаков релейных сигналов, устройство запоминания экстремизма, дифференцирующее устройство и устройство определения модуля, выход первого преобразователя системы координат через устройство определения модуля соединен со входом устройства запоминания экстрег -ма и первым входом второго компаратора, а со входом третьего и первого компараторов непосредственно, выходы последующих преобразователей системы координат соединены с -соответстьующими входами первого функционального преобразователя, первый вход которого связан с выходом устройства запоминания экстремьм а выход - со входом второго компаратора, выходы первого компаратора и в т орого компаратора связаны ссЪотвествующими входами устройства перемножния знаков релейных сигналов, а выход третьего компаратора через дифференцирующее устройство связан со входом обнуления устройства запоминания экстремума.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 283354, кл. G 05 В 17/00, 1969.
2.Павлов А.А. Синтез релейных систем, оптимальных по быстродействию. Наука, 1966, с..209-219 (прототип).
-
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейный регулятор | 1980 |
|
SU900257A1 |
| Релейный регулятор | 1980 |
|
SU885971A1 |
| Релейный регулятор | 1981 |
|
SU1029139A1 |
| Релейный регулятор | 1978 |
|
SU765782A1 |
| Релейный регулятор | 1979 |
|
SU857929A1 |
| Способ управления в пьезополупроводниковых преобразователях и устройство для его осуществления | 1977 |
|
SU739500A1 |
| Автоматический регулятор | 1983 |
|
SU1120282A1 |
| Адаптивная система управления с нестационарным упругим механическим объектом | 1984 |
|
SU1188697A1 |
| Релейно-линейный регулятор | 1981 |
|
SU1012200A1 |
| РЕГУЛЯТОР С РЕЛЕЙНОЙ ХАРАКТЕРИСТИКОЙ | 2005 |
|
RU2302029C1 |