скорости тангажа, подключенные к второму и третьему входам усилителясумматора, введен усилитель, вход которого подключен к выходу усилителя-сумматора, а выход - к приводу органов непосредственного управления подъемной силой.
Коэффициент усиления усилителя выбирается из условия компенсации подъемной силы руля высоты подъемной силой органов непосредственного управления подъемной силой (НУПС).
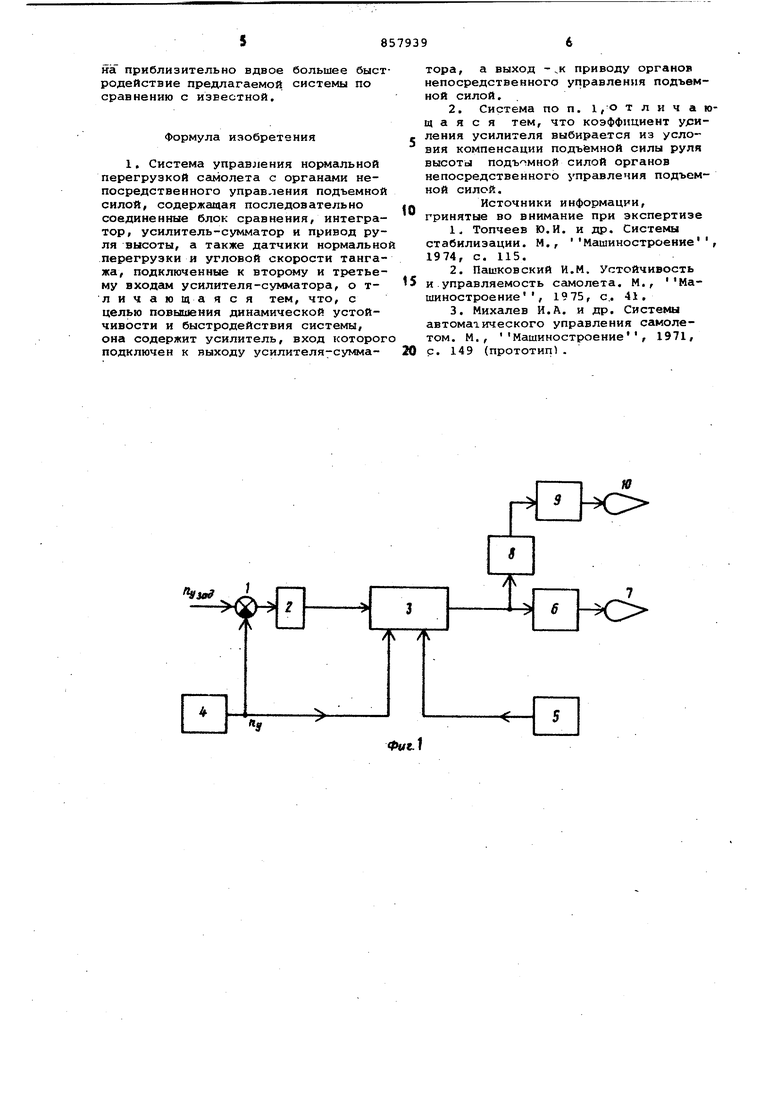
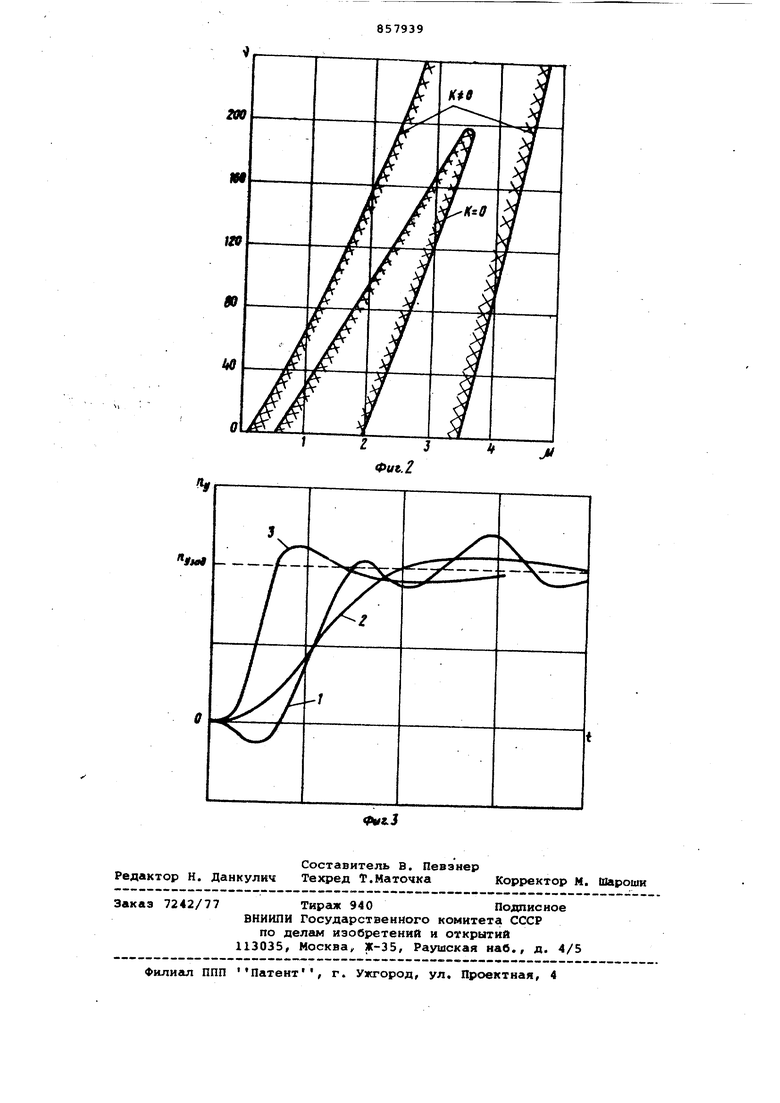
На фиг. 1 представлена блок-схема системы управления нормальной перегрузкой/ на фиг. 2 - графики областей устойчивости в плоскости коэффициентов, усиления усилителя-сумматора по сигналам с интегратора Т) и датчика угловой скорости тангажа /Л до и после введения дополнительног усилителя с коэффициентом усиления К, через который проходит сигнал управления на органы НУПС; на фиг.З графики переходных процессов управления нормальной перегрузкой до и после введения дополнительного усилителя, а также после повышения коэффициентов усиления усилителясумматора, которое становится возможным за счет расширения областей устойчивости после введения дополнительного усилителя.
Система управления нормальной перегрузкой (фиг. 1) содержит блок 1 сравнения заданного и текущего значений нормальной перегрузки, выход которого через интегратор 2 подключен к входу усилителя-сумматора 3, к двум другим входам которого подсоединены датчики 4 нормальной перегрузки и датчик 5 угловой скорости тангажа, причем к выходу усилителясумматора 3 подсоединены привод руля 6 высоты, связанный с рулем 7 высоты и усилитель 8, через который сигнал управления поступает на вход привода 9 органов НУПС, управляющий органами 10 НУПС.
Предлагаемая система работает следующим образом.
Традиционное управление нормальной перегрузкой осуществляется с помощью руля высоты. При отклонении руля высоты на нем возникает подъемная сила. Ввиду того, что руль высоты значительно удален от центра тяжести самолета, его отклонение приводит к возникновению значительного продольного аэродинамического момента, под действием которого происходит разворот корпуса самолета относительно траектории движения, изменяется угол атаки и, как следствие, подъемная сила. Таким образом, руль высоты воздействует на подъемную силу косвенно через создаваемый им продольный аэродинамический момент. Более того, при отклонении рул высоты самолета нормальной аэродинамической схемы (с задним расположением оперения), на нем возникает подъемная сила, противоположная по знаку подъемной силе, которая появляется в результате изменения угла атаки. Именно поэтому в известной системе наблюдается отрицательный заброс по перегрузке в начальной стадии переходного процесса (график 1, фиг. 3) .
Дополнительная цепь, образованная усилителем 8, приводом 9 и органами 10 НУПС, позволяет устранить влияние положительной обратной связи, обусловленной подъемной силой руля 7 высоты.
В предложенной системе для отработки заданной перегрузки одновре.-менно отклоняются руль 7 высоты и органы 10 НУПС, подъемные силы которых равны по величине и противоположны по направлению. В результате подъемная сила руля 7 высоты компенсируется подъемной силой органов 10 НУПС и на самолет действует только момент управления, создаваемый главным образом рулем 7 высоты. Тем самым существенно повышаются запасы устойчивости системы по интегралу сигнала ошибки и сигнал угловой скорости тангажа . Этот эффект иллюстрируется областями устойчивости (фиг. 2), полученными в предположении, что коэффициент усиления усилителя-сумматора 3 по сигналу с датчика 4 постоянен. При этом кривая 1 соответствует области устойчивости известной системы, кривая 2 соответствует режиму, когда с выхода усилителя-сумматора 3 сигнал управления поступает не только на привод руля 6 высоты, но и на привод 9 органов НУПС через усилитель 8, коэффициент усиления 1 которого выбран из услови компенсации подъемной силы стабилизатора подъемной силой органов 10 НУПС
На фиг. 2 график соответствует переходной функции предлагаемой сист мы, когда коэффициенты передачи усилителя-сумматора 3 остаются неизменными. Более плавный характер переходной функции 2 иллюстрирует снижение колебательности процессов управления нормальной перегрузкой и отсутствие обратной реакции на начальной стадии переходного процесса. Поскольку при использовании дополнительной цепи прохождения сигналов управления через органы НУПС на самолет расширяется область устойчивости, появляется возможность в значительной степени увеличить коэффициенты усиления - и Л ДО значений, при которых запас устойчивости приближается к запасам устойчивости известной системы. В таком случае достигается существенное повышение быстродействиа/ что |}ллюстрируется кривой 3 (фиг. 3), которая указывает на приблизительно вдвое большее быст родействие предлагаемой системы по сравнению с известной, Формула изобретения 1. Система управления нормальной перегрузкой самолета с органами непосредственного управления подъемной силой, содержащая последовательно соединенные блок сравнения, интегратор, усилитель-сумматор и привод руля высоты, а также датчики нормально перегрузки и угловой скорости тангажа, подключенные к вторс 1у и третьему входсш усилителя-сумматора, о тличающаяся тем, что, с целью повышения динамической устойчивости и быстродействия системы, она содержит усилитель, вход которог подключен к выходу усилителя-сумматора, а выход -.к приводу органов непосредственного управления подъемной силой, 2. Система по п. 1, о т л и ч а ющ а я с я тем, что коэффициент ухзиления усилителя выбирается из условия компенсации ПОДЪЁМНОЙ силы руля высоты подъ мной силой органов непосредственного управления подъемной силой. Источники информации, принятые во внимание при экспертизе 1,Топчеев Ю.И. и др. Системы стабилизации. М,, Машиностроение , 1974, с. 115. 2,Пашковский И.М. Устойчивость и .управляемость самолета. М., Машиностроение, 1975, с.. 41, 3,Михалев И.А, и др. Системы автомааического управления самолетом. М., Машиностроение, 1971, с. 149 (прототип.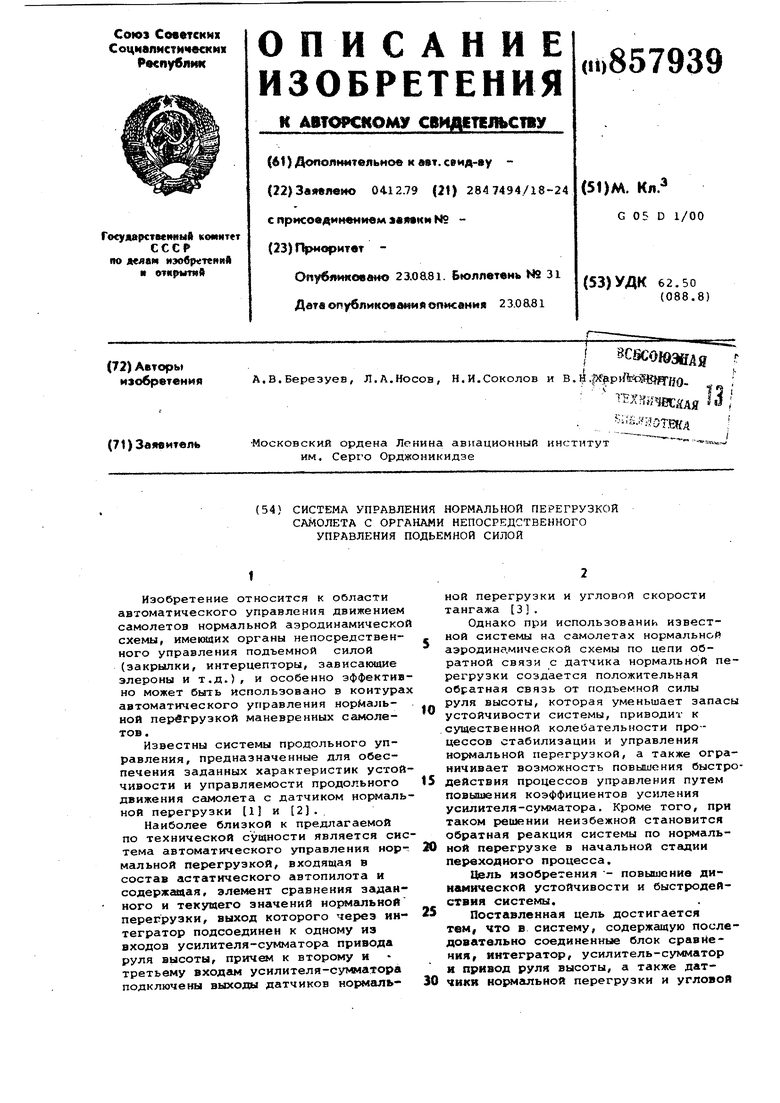

| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ ПОДЪЕМНОЙ СИЛОЙ САМОЛЕТА | 1991 |
|
RU2009963C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2001 |
|
RU2192366C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379738C1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 2008 |
|
RU2379739C1 |
| Способ и система управления продольным движением при разбеге по взлётно-посадочной полосе и наборе высоты беспилотного летательного аппарата со специально расположенными передними и задними крыльями | 2018 |
|
RU2695897C1 |
| СПОСОБ ПРОДОЛЬНОГО УПРАВЛЕНИЯ САМОЛЕТОМ | 2007 |
|
RU2344460C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ САМОЛЕТОМ В ПРОДОЛЬНОМ КАНАЛЕ ПРИ ДОЗАПРАВКЕ В ВОЗДУХЕ | 2022 |
|
RU2833735C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 1991 |
|
RU2025413C1 |
| АВТОМАТ ПРОДОЛЬНОГО УПРАВЛЕНИЯ | 2007 |
|
RU2339989C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ И КОМПЛЕКСНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2327602C1 |
«у Фut.
