Изобретение относится к измерител ной технике и предназначено для использования в автоматизированных си стемах контроля и управления движением автомобильного транспорта. По основному авт.св. № 484543 известно устройство для учета экипажей содержащее датчик, выполненный в виде упругой оболочки, заполненной воз духом, расположенный под проезжей частью дороги, блок обработки сигнала, подключенный к счетчику, а также термоанемометрнческий преобразователь , выполненный в виде глухой камеры, подключение к термоанемометру соединенному с блоком обработки са€Гнала и с датчиком СПОднако известное устройство может учитыватьколичество осей, но не позволяет определять массу перевозимого груза и тип автомобиля. Целью изобретения является расширение функциональных возможностей устройства. Поставленная цель достигается тем, что в устройство для учета экипажей введены датчик времени, блок ввода информации, блок регистрации и вычислительный блок, первый и второй входы которого соединены с перьым и вторым выходами блока обработки сигналов, третий и четвертый выходы которого подключены ко входам датчика времени, выход которого соединен со вторым входом блока обработки сигналов, выход блока ввода информации подключен к третьему входу, вычислительного блока, выход которого соединен со входом блока регистрации. Кроме того, блок обработки сигналов содержит элемент ШШ. элементы 1Ц элемент управления, формирователи ко да, формирователь импульсов, элемент вычисления скорости, элемент вычисления количества движения и элемент вычисления массы, вход которого соединен с первым входом блока обработки сигналов, который подключен ко вхдду
формирователя импульсов и через элемент вычисления количества движения к первому входу элемента вычисления скорости, выход элемента измерения массы соединен с первым входом первого формирователя кода и со вторым входом элемента вычисления скорости, выход которого подключен к первому входу второго формирователя кода, выходы формирователей кода через элементы И соединены с первым и вторым входами элемента ИЛИ, выход формирователя импульсов подключен к управляющим входам формирователей кода, к входу элемента управления и к третьему выходу блока обработки сигнала, четвертый выход которого соединен с первым выходом элемента управления, второй итретий выход которого подключен к входам элементов И, четвертый выход элемента управления соединен со вторым выходом блока обработки сигналов второй вход которого подключен к третьему входу элемента ИЛИ.
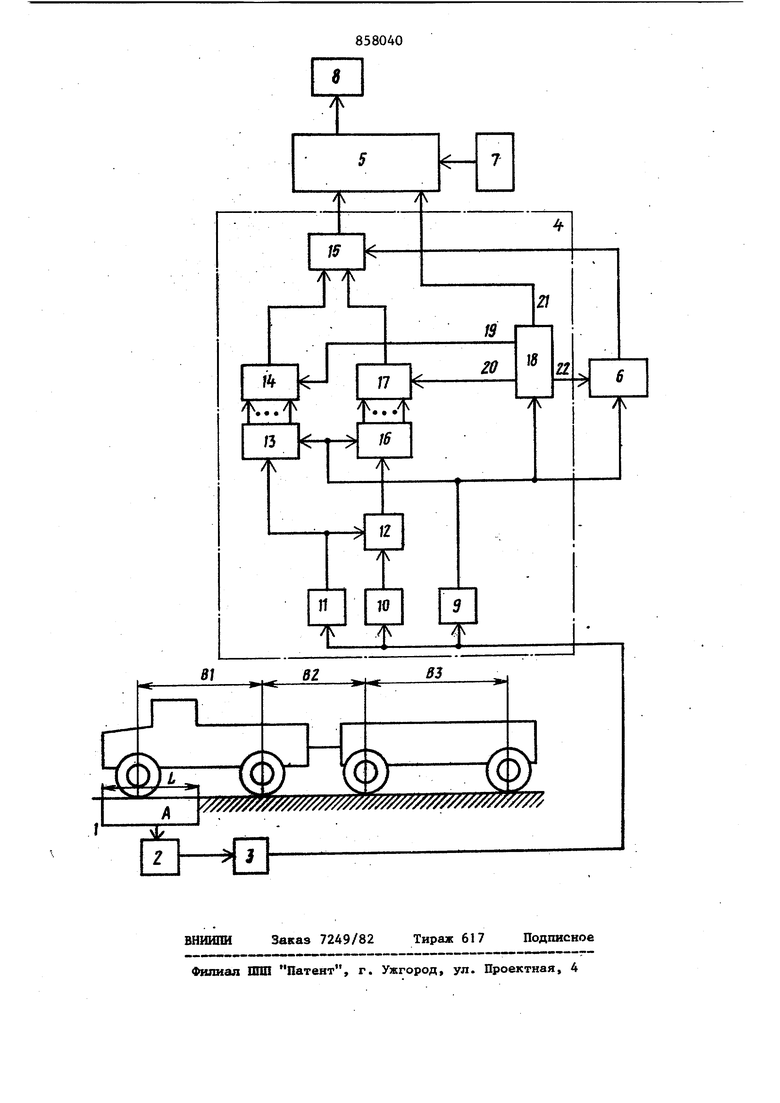
На чертеже представлена функциональная схема предлагаемого устройства.
Устройство состоит иэ датчика 1, представляющего собой заполненную воздухом или нейтральным газом герметичную камеру, которая соединена каналом с термоанемометром 2. Послед1шй связан с электроизмерительной схемой 3, соединенной с блоком 4 обработки сигнала. В состав устройства входит вычислительный блок 5, датчик 6 времени, блок 7 ввода информации, блок 8 регистрации. Термоанемометр 2 с электроизмерительной схемой 3 предназначены для преобразования скорости изменения давления в камере датчика 1 в электрический сигна Блок 4 обработки сигнала, содержит фомирователь 9 импульсов, элемент 10 вычисления количества движения, элемент 11 вычисления массы, элемент 12 вычисления скорости, первый формирователь 13 кода, первый элемент И 14, элемент ШШ 15, второй формирователь 16 кода, второй элемент И 17, элеме 18 управления. Входы формирователя импульсов 9, элемента 10 вычисления количества движения и элемента 11 вычисления массы подключены к выходу электроизмерительной схемы 3. Выход элемента 11 вычисления массы соединен с одними входами элемента 12 вычисления скорости и первого формирователя 13 кода. Выходы последнего через первый элемент И 14 и элемент ИЛИ 15 соединены с вычислительным блоком 5. Последний по одному из входов соединен с блоком 7 ввода информации.
Выход вычислительного блока 5 соединен с блоком 8 регистрации. Выход элемента 10 вычисления количества движения подключен к другому входу элемента 12 вычисления скорости. Выход поспеднего через второй формирователь 16 кода и второй элемент И 17 подключен к другому входу элемента ИЛИ 15. Выход формирователя 9 импульсов подключен к другим входам обоих формироs вателей 13 и 16 кодов, ко входу элемента 18 управления и к одному входу датчика 6 времени. Выход 19 элемента 18 управления подключен к одному из входов цервого элемента И 14, выход
Q 20 - к одному из входов второго элемента И 17, выход 21 - к третьему входу вычислительного блока 5, выход 22к другому входу датчика 6 времени. Выход датчика 6 времени подсоединен к
5 третьему входу.элемента ИЛИ 15.
Элемент 18 управления предназначен для синхронизации работы блока 4 обработки сигнала с вычислительным блоком 5. Вычислительный блок 5 обеспечивает операции вычисления, хранения результатов вычисления и выдачи окончательного результата на блок 8 регистрации. Блок 7 ввода информации предназначен для хранения эталонных параметров, с которыми сравниваются измеренные и вычисленные значения.
Датчик 6 времени формирует тактовые импульсы времени и код времени.
Устройство работает следующим образом.
Датчик 1 встроен в проезжую часть магистрали. При перемещении колес передней оси автомобиля по верхней поверхности оболочки датчика 1 упругая поверхность его деформируется. Величина деформации характерных точек оболочки в ее средней части поперек базы зависит от составляющей массы автомоб ля, скорости его движения и величины перемещения колеса вдоль
0 базы.
Изменение скорости деформации упругой поверхности датчика I преобразуется в скорость изменения давления в камере.
5 Воздух с изменением давления из камеры поступает через канал в термоанемометр 2, где изменение давления приводит к изменению сопротивления терморезистора. Сигнал с выхода тер моанемометра 2 через электроизмерительную схему 3 поступает на входы формирователя 9 импульсов, элемента 10 вычисления количества движени и элемента 11 вычисления массы. Эле мент 10 вычисления количества движе ния определяет амплитудное значение скорости деформации, которое являет составляющей количества движения. Элемент 10 вычисления количества движения выполняется в виде экстремального элемента памяти, например в виде электрической емкости, под- . ключенной через диод к источнику си нала. Элемент 11 вычисления массы опре деляет составляющую массы. Проинтег рировав величину скорости деформаци по времени прохождения колесом ве- личины участка дороги, можно получить составляющую массы автомобиля. Элемент 11 вычисления массы может быть выполнен в виде интегрирующей цепочки и операционного усилителя. Сигнал с выхода элемента 1 вычисления массы и сигнал с выхода элемента 10 вычисления количества движения поступают на вход элемента 12 вычисления скорости. Сигналы с вы ходов элемента 11 вычисления массы и элемента 12 вычисления скорости поступают на формирователи 13 и 16 кода. Стробимпульс с выхода формирователя 9 импульсов запускает датчик 6 времени, элемент 18 управления, формирователи 13 и 16 кода. При этом формирователи 13 и 16 ко преобразуют единичные .сигналы в код Датчик 6 времени производит отсчет времени прохождения первого межосе- вого расстояния. По сигналам с выходов 19 и 20 элемента 18 управления информация с формирователей 13 и 16 кода поступает через элементы И 14 и 17, элемент ИЛИ 15 на вход вычисли тельного блока 5, где записывается ,информация по сигналу с выхода 21 элемента 18 управления. При наезде на датчик 1 колес втор оси автомобиля процесс измерения мас сы и скорости повторяется. Дополнительно на выходе 22 элемента 18 управления формируется сигнал, который поступает на второй вход датчика 6 времени. С выхода последнего код вре мени через элемент ИЛИ 15 поступает в вычислительный блок 5. По сигналу с выхода 21 элемента 18 управления в вычислительном блоке 5 производится вычисление первого межосевого расстояния. Далее вычислительный блок 5 производит суммирование осевых нагрузок. По величине суммарной осевой нагрузки и количеству осей, равному двум, вычислительный блок 5 выбирает из блока 7 ввода информации группу эталонных значений межосевых расстояний для двухосевых автомобилей и сравнивает измеренное значение межосевого расстояния с эталонными значениями. При равенстве с одним из эталонных значений вычислительный блок 5 определяет тип автомобиля, его собственную массу. Далее вычислительный блок определяет разность между собственной массой автомобиля и измеренной суммарной осевой нагрузкой, соответствующей массе перевозимого груза. После прохождения каждой оси автомобиля через датчик 1 по сигналу с выхода датчика 6 времени вычислительный блок 5 производит вычисление максимального времени по допустимому рас стоянию между автомобилями при данной скорости движения. При наезде на датчик 1 колес третьей оси автомобиля вычислительный блок прекращает вычисление макси- мального времени. На его первый вход через элемент ИЛИ 15, элементы И 14 и 17, формирователи 13 и 16 кода поступают сигналы с выходов элемента 11 вычисления массы и элемента 12 вычисления скорости. Вычислительный блок 5 начинает выполнять последовательность операций, как посла колес второй оси автомобиля. При этом по команде с выхода 21 элемента 18 управления вычислительный блок 5 выбирает из блока 7 ввода информации мно жество межосевых расстояний трехосевых автомобилей, , определяет новый тип автомобиля, его массу, массу перевозимого груэа. При наезде на датчик четвертой оси автомобиля вычислительный блок 5 аналогично изложенному определяет его тип, массу и перевозимого груза. , После определения максимального ремени вычисленные параметры вычисительный блок 5 передает на блок 8 егистрации. Использование предлагаемого устойства позволяет получить непрерыв785МО 3 течение суток на хпобых дорогах для различных служб соответствующую информацию, например динамические нагрузки на полотно дороги для службы контроля состояния дорог, параметры транспортного потока, с учетом типа автомобиля, учет перевозимого груза по типам автомобилей для транспортных и производственных подразделений и т.д. В этих случаях устройство позволяет значительно повысить производи TejtbHocTb труда работников указанных служб. Формула изобретения 1.Устройство для учета экипажей по авт.св. № 484543, отличаю-|Ц е е с я тем, что, с целью расширения функциональных возможностей устройства, в него введены датчик времени, блок ввода информации, блок регистрации и вычислительный блок. Первый и второй входы которого соединены с первым и вторым выходами блока обработки сигналов, третий и четвертый выходы которого подключены ко входам датчика времени, выход которого соединен с вторым входом блок обработки сигналов, выход блока ввода информацни подключен к третьему в ду вычислительного блока, выход кото рого соединен со входом блока регистрации. 2.Устройство по п., о т л и ч а ю щ е е с я тем, что блок обработки сигналов содержит элемент ИЛИ, элемент И, элемент управления, формирователи кода, формирователь импульсов, элемент вычисления скорости, элемент вычисления количества движения и элемент вычисления массы, вход которого соединен с первым входом блока обработки сигналов, который подключен ко входу формирователя импульсов и через элемент вычисления количества движения к первому входу элемента вычисле1шя скорости, выход элемента измерения массы соединен с первым входом первого формирователя кода и со вторым входом элемента вычисления скорости, выход которого подключен к первому входу второго формирователй кода, выходы формирователей копа чепез элементы И соеаинены с пеовым и втооым входами элемента ШШ« выход формирователя импульсов подключен к управляю1цим входам формирователей кода, входу элемента управления и к третьему выходу блока обработки сигнала, четвертый выход которого соединен с первым выходом элемента управления, второй и третий выход которого подключен к входам элементов И, четвертый выход элемента управления соединен со вторым выходом блока обработки сигналов, второй вход которого подключен к третьему входу элемента ИЛИ. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 484543, кл. CJ 07 С 5/10, 1972 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регистрации работы транспортных средств | 1979 |
|
SU894760A1 |
| Устройство для поосного взвешивания вагонов в движении | 1985 |
|
SU1278603A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2078324C1 |
| Система для регистрации и обработки индикаторных диаграмм | 1981 |
|
SU954839A1 |
| Устройство для регистрации эксплуатационных показателей автотранспортных средств | 1988 |
|
SU1566392A1 |
| СПЕЦИАЛИЗИРОВАННЫЕ ЭЛЕКТРОННЫЕ НАРУЧНЫЕ ЧАСЫ | 2000 |
|
RU2189620C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |
| СИСТЕМА ДИСТАНЦИОННОГО КОНТРОЛЯ ЗА ТРАНСПОРТИРОВКОЙ СТРОИТЕЛЬНЫХ ГРУЗОВ | 2003 |
|
RU2243592C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЭКСПЛУАТАЦИОННЫХ ПАРАМЕТРОВ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2107946C1 |
| Способ определения производительности ленточного конвейера и устройство для его осуществления | 1982 |
|
SU1167439A1 |