и в разматывающей ветви тормозящей лебедки.
Цель изобретения - повышение экономичности и надежности работы устройства.
Поставленная цель достигается тем что устройство дополнительно снабжено ключами в цепях задания частоты вращения и натяжения каната и узлом контроля натяжения, который содержит узел сравнения, выпрямитель, усилитель, пороговое устройство, блок логики и блок ключей, причем входы узла сравнения подключены сосргветственно к тахогенераторам приводных двигателей, его выход подключен через - выпрямитель к входам порогового устройства и усилителя, выход усилител через, блок ключей, соединенный с переключающим устройством и выходом порогового устройства, подключен через суммирующие узлы к входам регуляторов угла открывания обоих выпрямителей, а блок логики своими входами подключен к тахогенераторам, пороговому и переключающему устройствам,а выходами соединен с ключами в цепях задания частоты вращения и натяжения каната.
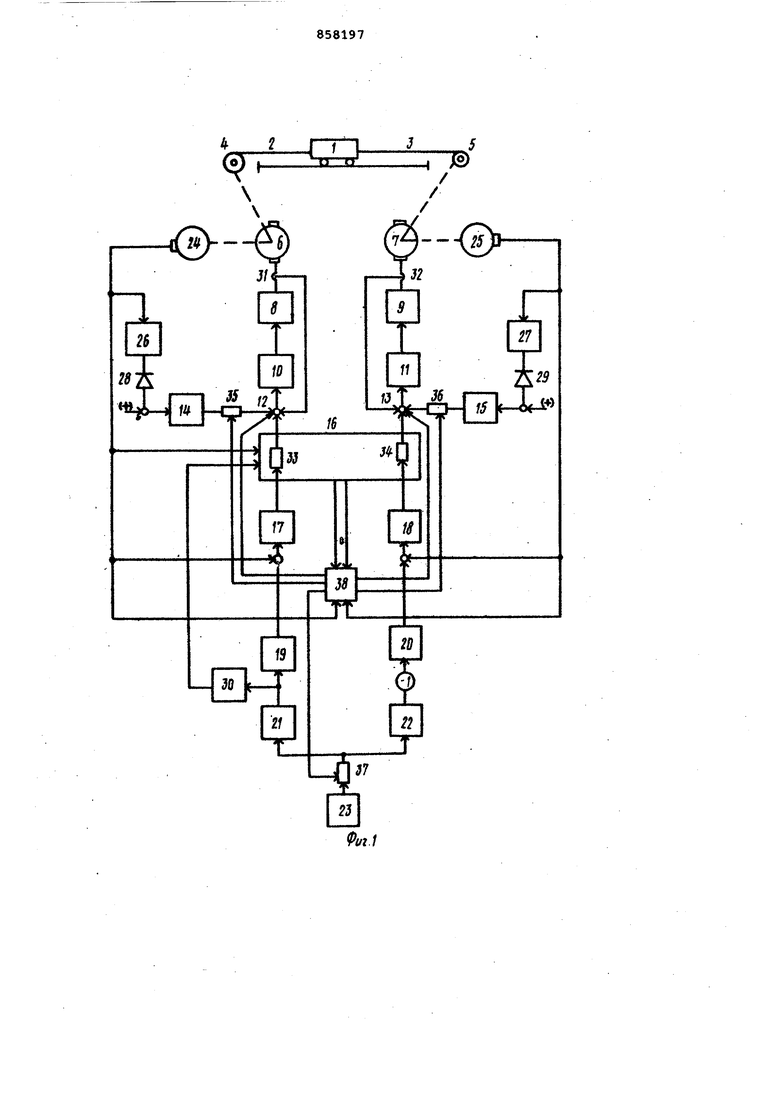
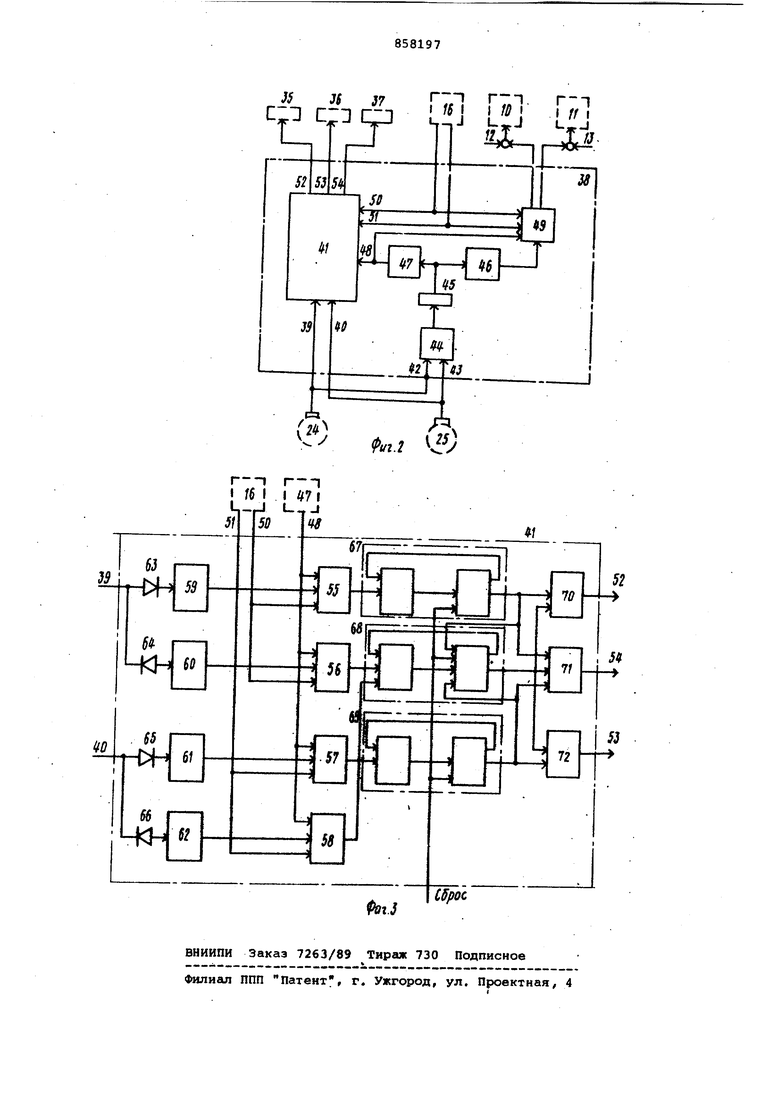
На фиг. 1 представлена функционалная схема устройства для управления слитковозом с канатным приводом; на фиг. 2 - узел контроля натяжения; на фиг. 3 - блок логики узла контроля натяжением.
Слитковоз 1 соединен канатами 2 и 3 с барабанами лебедок 4 и 5/ с приводными электродвигателями 6 и 7 постоянного тока. Устройство содержит управляемые выпрямители 8 и 9, регуляторы 10 и 11 угла открывания с суммирующими узлами 12 и 13, узлы 14 и 15 задания натяжения каната, переклю чающее устройство 16, ре;/ляторы 17 и 18 частоты вращения, задатчики 19 и 20 интенсивности, фазочувствительные выпрямители 21 и 22, узел 23 задания частоты вращения, тахогенерато ры 24 и 25, сочлененные с двигателями б и 7 , корректирующие узлы 26 и 27, диоды 28 и 29, датчик 30 напряжения, датчики 31 и 32 тока, управляемые ключи 33 и 34 в переключающем устройстве 16, ключи 35 и 36, включенные между узлами 14 и 15-задания натяжения и суммирующими узлами 12 и 13 регуляторов 10 и 11, ключ 37, включенный между узлом 23 и фазочувствительными выпрямителями 21 и 22, а также узел 38 контроля натяжения, входы которого соединены с переключающим устройством 16 и с тахогенераторами 24 и 25, а его выходы подключены к ключам 35 - 37 и к суммирующим узлам 12 и 13.
В узле 38 контроля натяжения вход 39 и 40 блока 41 логики и входы 42 и, 43 узла 44 сравнения соединены с тахогенераторами 24 и 25. Выход узла
44 сравнения соединен через выпрямитель 45 с входами усилителя 46 и порогового устройства 47, выход которого подключен к входу 48 блока 41 логики. Выход усилителя 46 через блок 49 ключей, который подключен к переключающему устройству 16 и пороговому устройству 47, соединен с суммирующими узлами 12 и 13 регуляторов 10 и 11. Вход 50 и 51 блока 41 логики : подключены к переключающему устройству 16, его выходы 52 и 53 соединены с ключами 35 и 36 в цепях задания натяжения, а его выход 54 соединен с ключом 37 в цепи задания частоты вращения .
В блоке 41 логики входы элементов И 55 - 58 подключены через входы 48, .50 и 51 блока к пороговому устройству 47 и переключающему устройству 16, а через согласующие устройства 59 - 62 и встречно-включенные диоды 63 н 64, 65 и 66 соединены с входами 39 и. 40 блока 41, которые подключены к тахогенераторам 24 и 25. Выходы элементов И подключены через узлы 67-69 памяти собранные на элементах ИЛИ-НБ, к выходным усилителям 70 -, 72, выходы которых 52 - 54 являются выходами блока 41 логики и соединены соответственно с ключами 35 - 37.
Устройство работает следующим образом.
В результате рассогласования скоростей ведущей и ведомой лебедок при образовании слабины в канате на выходе узла 44 сравнения появляется сигнал, пропорциональный относительной величине рассогласования. Так как рассогласование скоростей может быть как положительным, так и отрицательным, а уставка задания на натяжение каната и выход порогового устройства имеет определенную полярность, выходной сигнал узла 44 сравнения выпрямляется выпрямителем 45 и поступает на входы усилителя 46 и порогового устройства 47. При этом если рассогласование скоростей не превышает 10 - 15%, выходной сигнал через по| оговое устройство 47 не проходит, а на выходе усилителя 46 появляется . сигнал , который с помощью блока 49 ключей, управляемого переключающим устройством 16, проходит к суммирующему узлу 12 или 13 регулятора угла открывания 10 или 11 цепи управления той лебедки , которая на момент появления рассогласования поддерживает натяжение каната и увеличивает задание натяжения.
При обрыве каната сигнал рассогласования скоростей на выходе узла 44 сравнения превьииает уставку порогоЬого устройства 47, и с его выхода проходит на вход 48 блока 41 логики и к блоку 49 ключей, блокируя прохождение сигнала на увеличение натяжения каната. Пусть лебедка 4 наматывающая, а
лебедка 5 разматывающая. При этомна входе 39 блока поступает положительны сигнал от тахогенератора 24, который через диод 63 и согласующее устройство 59 поступает как сигнал 1 на один из входов элемента 55. На вход 40 блока логики поступает отрицательг ный сигнал от тахогенератора 25, который через диод 66 и согласующее устройство 62 подается как сигнал 1 на один из выходов элемента 58. Когда лебедка 4 тянущая, а лебедка 5 поддерживает натяжение каната - на входе 50 блока 41 логики, соединенном с переключающим устройством 16, имеется сигнал 1, а на входе 51 - сигнал О.
При обрыве каната 2 частота вращения двигателя 6, лишенного статической нагрузки, под действием задания на натяжение от узла 14 возрастает. Когда рассогласование частот вращения двигателей 6 и 7 превзойдет 10 - 15%, выходной сигнал узла 44 сравнения превысит уставку порогового устройства 47, и на его выходе появится сигнал 1, При этом на всех входах элемента 55 собираются сигналы 1 и на его выходе - также сигнал 1. Этот сигнал запоминается узлом 67 памяти и передается к выходным усилителям 71 и 70, которые действуют на размыкание ключа 37 в цепи задания частоты вращения и ключа 35 в цепи задания натяжения каната лебедки 4.
При снятии сигнала задания на часг тоту вращения переключающее устройство 16 переключается и на входе 56 появляется сигнал О, а на входе 51сигнал 1. Лебедка 5 осуществляет торможение слитковоза. На выходе эле, мента 55 появляется сигнал О. Однако на выходе узла 67 сигнал 1 об обрыве каната поддерживается до поступления каманды Сброс, Если обрыв каната произошел при торможении слитковоза лебедкой 5, когда на выходе 51 имеется сигнал 1, а на выходе 50 -(сигнал О, то сигнал 1 появляется на входе элемента 58), запоминает, ся узлом 68 памяти и через усилители 70 - 72 воздействует на ключи 35-37, которые снимают задания на частоту вращения двигателя и натяжение каната в обеих ветвях слитковоза. Аналогично устройство работает при перемещении слитковоза в сторону лебедки 5, когда положительный сигнал от
тахогенератора 25 поступает на вход 40, а отрицательный сигнал от тахо-генератора 24 поступает на вход 39. При обрыве каната в ветви тянущей лебедки 5, когда на входе 51-сигнал 1 а на входе сигнал обрыва каната проходит через элемент 57. При этом paз.v1ыкaeтcя ключ 37 в цепи задания частоты вращения и ключ 36 в цепи задания натяжения лебедки 5. При обрыве каната разматывающей ветви лебедки 4 при торможении слитко- воза сигнал обрыва проходит через элемент 56 к усилителям 70 - 72, отключающим ключи в цепях задания натяжения обеих лебедок и в цепи задания частоты вращения.
Наличие в устройстве управления слитковозом с канатным приводом узла контроля натяжения каната обеспечивает своевременное выявление обрыва каната, обнаружение и устранение слабины в канате, повышает экономичность ёлектропривода, срок службы каната, надежность работы слитковозг.
Формула изобретения
Устройство для управления слитковозом с канатным приводом по авт. св № 714611, отличающееся тем, что, с целью повышения экономичности и надежности работы слитковоза, оно дополнительно снабжено ключами в цепях задания частоты вращения и натяжения каната и узлом контроля натяжения, который содержит узел сравнения выпрямитель, усилитель, пороговое устройство, елок логики и блок ключей, причем входы узла сравнения подключены соответственно к тахогенёраторам приводных двигателей, его выход подключен через выпрямитель к входам порогового устройства и усилителя, выход усилителя через блок ключей, соединен ный с переключающим устройстве и выходном порогового устройства подключен через суммирующие узлы к входам регулятора угла открывания обоих выпрямителей, а блок логики своими входами подключен к тахогенераторам, пороговому и переключающему устройствам, а выходами соединен с ключами в цепях задания частоты вращения и натяжения каната..
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР 714611, кл. Н 02 Р 7/68, 1980.
42
Cll CIDCZ3 л л J7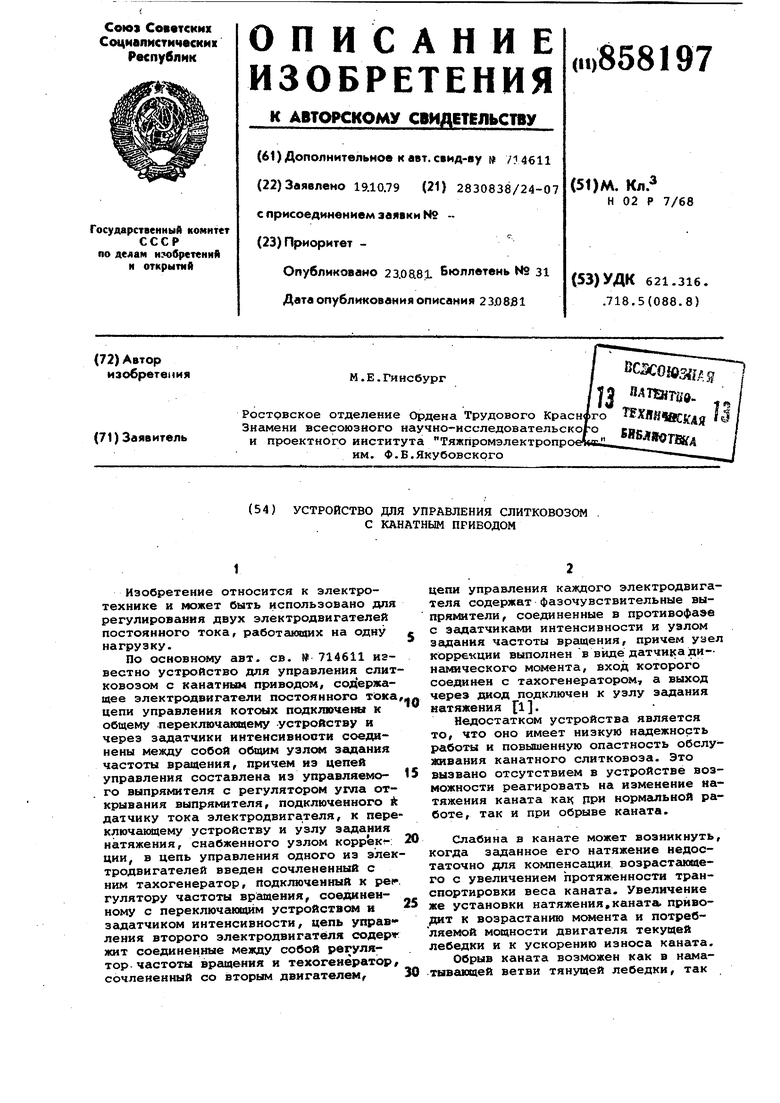
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления слитковозом с канатным приводом | 1977 |
|
SU714611A1 |
| Источник технологического тока | 1977 |
|
SU733220A1 |
| Электропривод переменного тока | 1980 |
|
SU955482A1 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
| Электропривод постоянного тока | 1982 |
|
SU1073867A1 |
| Устройство для управления накопите-лЕМ пОлОСы | 1978 |
|
SU809077A1 |
| Реверсивный тиристорный электропривод с двухзонным регулированием | 1977 |
|
SU692043A1 |
| Реверсивный тиристорный электропривод переменного тока | 1976 |
|
SU738087A1 |
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |
| Следящий электропривод | 1980 |
|
SU903804A1 |