(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СЛИТКОВОЗОМ С КАНАТНЫМ ПРИВОДОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления слитковозом с канатным приводом | 1979 |
|
SU858197A2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ОБОРУДОВАНИЕМ ЭКСКАВАТОРА-ДРАГЛАЙНА | 2006 |
|
RU2332542C1 |
| Устройство для управления электроприводами грузовых лебедок грейферного крана | 1986 |
|
SU1426933A1 |
| РЕГУЛИРОВАНИЯ | 1966 |
|
SU189763A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1985 |
|
SU1286694A1 |
| Устройство для управления лебедками грейферного крана | 1989 |
|
SU1730021A1 |
| Устройство для управления движением ковша экскаватора-драглайна | 1986 |
|
SU1425276A1 |
| Электропривод лебедок носовых канатов драги | 1986 |
|
SU1421827A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1982 |
|
SU1096745A1 |
| Способ управления движением ковша драглайна и устройство для его осуществления | 1982 |
|
SU1084390A1 |
,.1 ,
Изобретение относится к электротехнике и может быть использовано для регулирования пвух электродвигателей постоянного тока, рабЬтаюших на одну нагрузку.
Известны устройства для управления электродвигателями троллевьхх слитково- . зов-tL I В этих устройствах приводы электродвигателя установлены на самой платформе и управляются с помощью троллев, что снижает надежность их работы, ограничивает скорость передвижения.
Наиболее близким техническим решением к данному изобретению является устройство управления слитковозом с канатным приводом, содержащее электродвигатели постоянного тока, цепи управления которых подключены к обще-му переключающему устройству и через за датчики интенсивности соединень между собой общим узлом задания частоты вращения, причем каждая из цепей включает .упраачяемый выпрямитель
С регулятором угла открывания та,прямителя., подключенного к датчику тока электродвигателя, к переключающему устройству и узлу задания натяжения с узлом коррекции, а .цепь управле1П1я одного из электродвигателей содержит ОСгчлененнь1й с ним тахогенератор, подключенный к регулятору чacтoт л вращения, соединенному с перекЛючшощнм устройством и задатчиком интенсивноетн 2.
Однако известное устройство не обеспечивает требуемого натяжения каната, в результате чего сокращается срок службы электропривода.
Целью изобр етения является повыще- :ние качества регулирования час-готы вращения и натяжения, каната, а также увеличение срока службы электропривода.
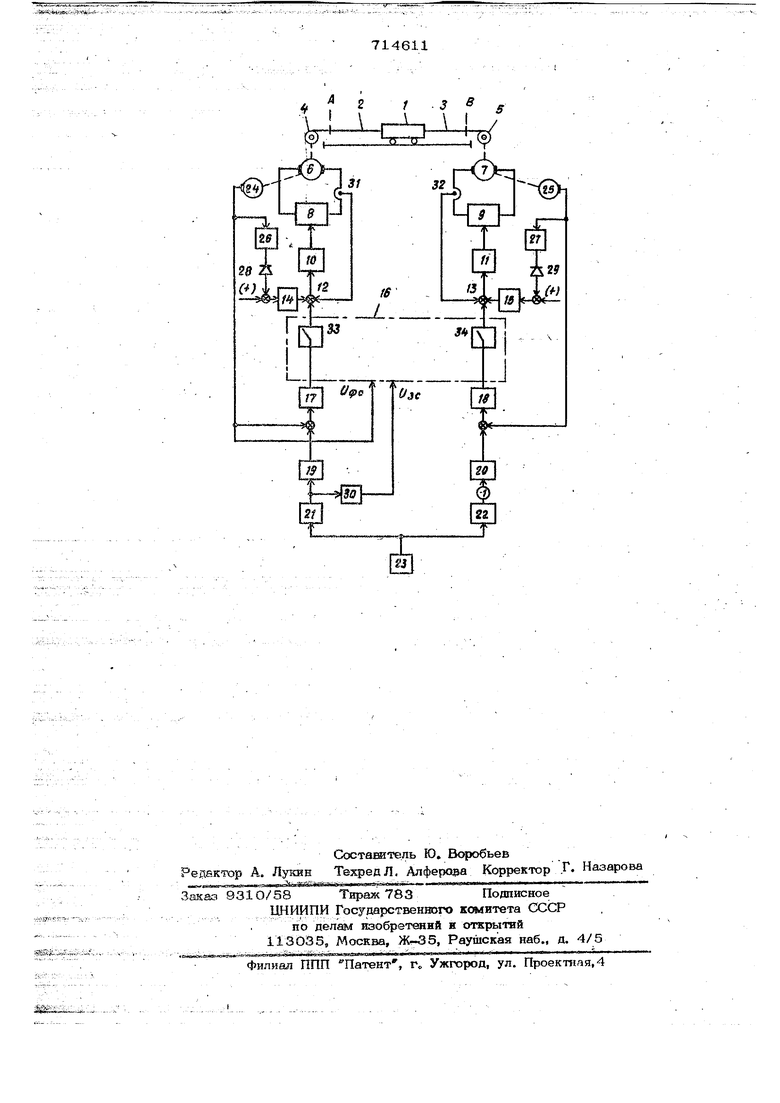
Указанная цель достигается тем, что устройство дополнительно снабжено последовательно соединенными регуля-гором частоты вращения и тахогепоратором, сочлененным со. вторым цпиг-.чтолг.м, а п ПОЛ управления каждого электродвигателя - фазочувствительные выпрямители, соединенные в противофазе с задатчиком.интен сивности и узлом задания частоты вращения, причем узел коррекции выполнен в ви де датчика динамического момента, вход которого соединен с тахогенератором, а выход через диод подключены к узлу за: Дания натяжения.. . На чертеже представлена блок-схема устройства.. Слитковоз 1 соединен канатами 2 и 3 с барабанами лебедок 4 и 5 с приводными электродвигателями пострянноге тока 6 и 7. Электродвигатели 6 и 7 подключень. к уйравляемым выпр .мителям 8 и 9, регуляторы угла откры ния 10 и 11 которых через суммирующие узлы 12 и 13 соединены с узлами задания натяжения; каната 14 и 15, а через переключающее устройство 16 с регуляторами частоты фащения 17 и 18, йходы которых через за датчики интенсивности 19 и 20 к через фазочувстБИтельные вьшрямители 21 и 22 соединены с общим Для двух электродви гателей уздом задания скорости враще1шя, 23. Выходы тахогенератороБ 24 и 25 электродвигателей 6 и 7 подклю чены к входам регуляторов скорости 17 и 18 и к корректирующим узлам 26 и ,27, выполненным в вице датчиков дина мического момента, которые через дио- . ды 28 и 29 соединены с входами узло задания натяжения 14 и 15. Выход тахогенератора 24 подключен к входу переключающего устройства 16, к кото р1омуподключен также вход разделитель ного датчика напряжения ЗО, вход которого соединен с фазочувстш тельным и.шрямителем , 21. Датчики тока 31 и. 32 электродвигателей соединены с суммирующими узлами 12 и 13. Переключающее устройство 16 содержит управляемые ключи 33 и 34 , соединенные с регуляторами частоты вращения 17 и 18 и суммирующими узлами 12 и 13. Устройство работает еле дующим образом. Перед началом движения блитковоза Iне регуляторы угла открывавия 10 и IIвыпрямителей 8 и 9 от узлов зада ния натяжения 14 и 15 поступает опор сигнал, который вьтзйШёТ ffOTHa Й55Оета5Йт1ГЖ 1р- й«5пШШЙС1го йЩрВтшМйй.БраЩающие моменты электродвигателей 6 и 7, что соответствен
14 ю обеспечивает необходимое натяжение канатов2 и 3. При поступлении сигнала от узла задания скорости 23 на перемещение слитковоза, например, влево лебедка 4 становится тянущей, а лебедка 5 тормозящей. Сигнал от узла задания скорости 23 поступает через фазочувстви- тельные вьшрямители 21 и 22 и задатчикк интенсивности 19 и 20 на входь регуляторов частоты вращения 17 и 18. лебедок 4 и 5 в противоположной полярности. При этом ключ 33 переключающего устройства 16 замыкает цепь управления электродвигателя 6, в результате чего общий сигнал на ныходе регулятора 10 складывается из сигнала, поступающего из узла задания натяжения 14 и сигнала от регулятора частоты ащения 17. Электродвигатель 6 лебедки 4 увеличивает вращающий момент и обеспечивает перемещение сли-гаовоза влево. Темп разгона в указанном направлении определяется задатчиком интенсивнос-га 19. Ключ 34 переключающего усаройства 16 при этом разомкнут и вращающий момент, развиваемый двигателем 7 лебедки 5, определяется только величиной сигнала, поступающего к регулятору угла открывания 11 ш шрямителя 9 от узла задания натяжения 15, что обеспечивает необходимость поддержания натяжения каната 3, При приближении к крайнему положению задание на снижение скорости слитковоза 1 вызывает размыкание ключа 33 и замыкание ключа 34 переключающего устройства 16, в результате чего электродвигатель 6 лебедки 4 развивает момент, необходимый только для поддержания каната 2, а электродвигатель 7 лебедки 5 развивает момент, обеспечивающий торможение слитковоза 1 с заданным темпом. Величина момента торможения определяется суммарным сигналом, ПОСТупазощим к регулятору угла открывания 11 выпрямителя 9 от узла задания натяжения 15 и регулятора 18, а темп торможения определяется задатчиком интенсивности 20. Аналогичным образом цепи управления электродвигателей 6 и 7 работают при перемещении слитковоза 1 слеванаправо. Только при этом во время разгона и движения слитковоза с установившейся скоростью замкнут ключ 34, а ключ 33 разомкнут, а во время торможе571
ния ключ 34 разомкнут, а клюЧ 33 замкнут.
В динамических режимах работы датчики динамического момента 26 и 27, дифференцируя напряжение тахогенераторов 24 и 25, выдают корректирующие сигналы, пропорциональные производной от .частоты 1фащения лебедок 4 и 5 и их моменту инерции. Сигналы датчиков 26 и 27 поступают через диодь 2Q . и 29 на входы узлов задания натяжен1яя 14 и 15. Благодаря диодам 28, 29 корректирующий сигнал поступает к узлу задания натяжения и вычитается из опорного сигналатолько в режиме натяжения , когда регуляторьГ частоты ащения 17 и 18 отключены от регуляторов угльвого управления 1О и li. При работе лебедки на перемещение или торможение слитковоза сигналы коррекции через диоды 28 и 29 не проходят, благодаря чему максимальньхй момент электродвигателей, обусловленный огра ниченным на определенном уровне Bbixojaным сигналом регуляторов 17 и 18 и суммируемым с ним опорным сигйалом задания натяжения, остается в эттсс ipiS жимах на заданном уровне.
Наличие в цепи управления каждого электродвигателя регулятора и датчика частоты вращения обеспечивает непрерывную обратную связь по скорости, улучшает качество переходных процессов, ограничивает рывки в канате, улучшает устойчивость системы регули- ровання скорости слитковоза в щироких пределах и пойыщает срок службы кйната и электропривода.
Формула изобретения Устройство для управления слйтково зом с канатным приводом, содержащее
1 6
электродвигатели постоягшого тока, цепи управления которых подключены к обшему переключающему устройству я черкез задатчики интенсивности соедине ны между собой общим узлом задания частоты вращения, причем каждая из цепей управления составлена из управляемого вьшрямителя с регулятором угла открывания вьшрямителя, подключенного к датчику тока электродвигателя, к переклкхчающему устройству и узлу задания натяжения, снабженного узлом коррекдни, в цепь управления одного из электродвигателей введен сочлененный с 1ШМ тахогенератор, подключенный к регулятору частоты вращения, соединенному с переключающим устройством и задат чиком интенсивности, отличающееся тем, что, с целью повышения качества регулировашя частоты ращения дйектродвигателей и натяжения канатй, увеличения срока службы электропривода, в цепь управления второго электродвигателя дополнительно введены соединенные между собой регулятор частоты щэащения и тахогенератор, сочлененный со вторым двигателем, а в цепи управления каждого элеКтродЁИгателя - фазочувстштель- ные выпрямители, соединенные в про- тивофазе с задатчиками интенсивности н узлом Задания частоты вращения, при-. чем узел коррекции вьшолнен в виде датчика дштмического момента, вход которого соединен с тахогенератором, а выход через диод подключен к узлу задания натяжения.
Источники информации, принятые во внимание цри экспертизе .
714611
