(54) ГАЙКОВЕРТ

| название | год | авторы | номер документа |
|---|---|---|---|
| Гайковерт | 1981 |
|
SU954204A1 |
| Гайковерт | 1977 |
|
SU727414A1 |
| Гайковерт | 1979 |
|
SU861054A1 |
| Устройство для управления гайковертом | 1980 |
|
SU933437A1 |
| Устройство для сборки и разборки резьбовых соединений | 1980 |
|
SU1024255A1 |
| Устройство для управления гайковертом | 1979 |
|
SU837839A1 |
| Устройство для управления электромагнитной муфтой | 1980 |
|
SU903996A1 |
| Устройство для сборки и разборки резьбовых соединений | 1984 |
|
SU1174244A1 |
| Система управления многошпиндельным гайковертом | 1985 |
|
SU1265032A1 |
| ГАЙКОВЕРТ | 1991 |
|
RU2025268C1 |
1
Изобретение относится к машиностроению и может быть использовано в различных отраслях промьшшенности и строительства для механизированной затяжки резьбовых соединений рабочим инструментом, в частности, г.айковертами.
Известен гайковерт, содержащий корпус, размещенные в нем электро-, двигатель, узел.контроля и регулирования крутящего момента в виде электромагнитной фрикционной -муфты с внешними и внутренними дисками, ведущая полумуфта которой выполнена в виде маховика и размещена на выходном валу электродвигателя, шпиндель с рабочей головкой, поводок, соединенный с внешними дисками электромагнитной муфты, систему управления с программным блоком формирования импульсов включения электромагнитной муфты и электродвигателя, электродинамического торможения последнего и узла контроля и регулирования крутящего момента l .
Недостаток указанного гайковерта заключается в утечках магнитного потока через поводок, корпус ведущей полумуфты и вал электродвигателя,что приводит к уменьшению магнитного потока, пересекающего якорь электромагнитной муфты, а следовательно, к уменьшению скорости и силы его притяжения к ведущей полумуфте и к уменьшению величины создаваемого импульса крутящего момента.
Наиболее близким по технической сущности к предлагаемому явля;ется гайковерт, содержащий корпус, размещенные в нем электродвигатель, шпиндель с рабочей головкой, узел контроля и регулирования крутящего момента в виде электромагнитной фрикционной муфты, ведомая полумуфта которой размещена на шпинделе, систему управления с программным блоком формирования импульсов включения электромагнитной муфты и электродвигателя, электродинамического торможения последнего и узла контроля и регулирования крутящего момента, а ведущая ПОЛУмуфта выполнена в виде маховика .
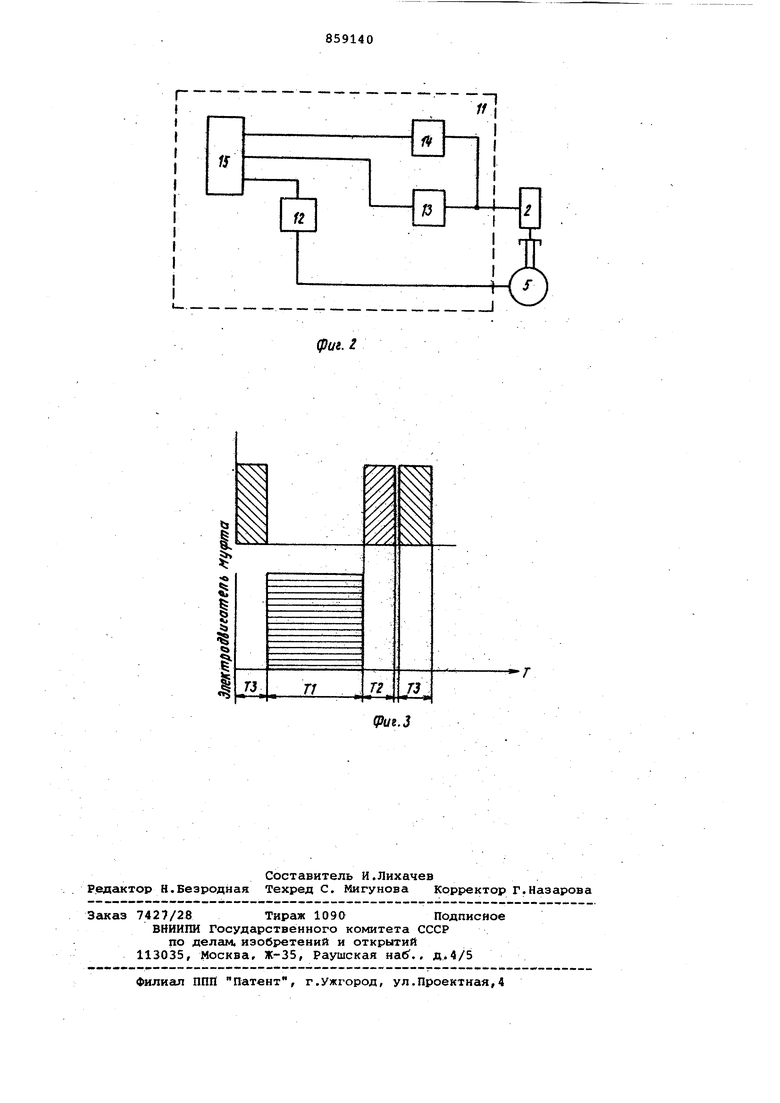
Недостатком такого гайковерта является то что при работе с ним в вертикальной плоскости, когда ведомая часть электромагнитной муфты (якорь и фр 1кционные диски) расположена сверху ее ведущей части, происходит резкое снт€жение КПД и производительности гайковерта из-за существенного увеличения величины остаточного момента муфты, приводящего к снижению скорости разгона ведущей полумуфты-маховика, к снижению величины накопленной кинетической энергии в ней и к перегрузке электродви гателя. Кроме того, в таком гайко-; верте остаточный момент муфты увели чивается за счет ;сил остаточного магнитного потока и сил молекулярного сцеплени я между ее фрикционными дисками после отключения катушки муф ты, что приводит к снижению КПД и производительности гайковерта. Цель изобретения - повышение эффективности гайковерта. Поставленная цель достигается тем, что гайковерт снабжен кинематической связью, соединяющей выходной вал электродвигателя с ведущей полумуфтой, которая размещена посредством тел качения на шпинделе, а система управления включает в себя блок размагничивания электромагнитной муфты, соединенный с программным бло ком. На фиг.1 изображена конструктивная схема гайковерта; на фиг.2 электрическая блок-схема гайковерта на фиг.3 - циклограмма формирования импульсов включения электродвигателя и электромагнитной муфты программным блоком. Fa koBepT содержит корпус (ые показан), размещенные в нем шпиндель 1 с рабочей головкой, узел регулирования крутящего момента в виде электро магнитной фрикционной муфты 2, ведущая полумуфта 3 которой соединена через кинематическую связь 4 с валом электродвигателя 5. Ведущая полу муфта 3 и ведомая полумуфта б электромагнитной муфты 2 у ановлены на шпинделе 1, причем ведущая полумуфта 3 установлена на шпинделе 1 на подшипниках 7, а ведомая полумуфта 6, функцию которой выполняют внутрен ние фрикционные диски - на шлицах 8 итимделя 1. На шпинделе 1 установлен также якорь 9 электромагнитной муфты 2 . Ведущая полумуфта 3, кинематическая связь 4 и поводок 10, установле ный на корпусе ведущей полумуфты 3, играют роль маховика. Гайковерт имеет систему 11 управ ления, включающую узел питания 12 электродвигателя 5, узел 13 питания катушки возбуждения электромагнит-ной фрикционной муфты 2, выполняющей функцию узла контроля и регулирования крутящего момента, блок 14 размагничивания электромагнитной муфты 2 и программный блок 15 форми рования программы импульсов включения электродвигателя 5, Электромагнитной муфты 2, их торможения и регулирования крутящего момента. Гайковерт работает по прЪграмме импульсного включения электродвигателя 5 и. электромагнитной муфты 2, (фиг.3) где Т1 - время включенного состояния электродвигателя 5| Т2 - . время включенного состояния муфты 2 ТЗ - время размагничивания муфты 2 и возвращения ее фрикционных дисков в исходное (отключенное) положение перед очередным включением электродвигателя 5. При включении гайковерта за время Т1 электродвигатель 5 вместе с кинематической связью 4 и ведущей полумуфтой 3 разгоняются до номинальной скорости электродвигателя 5, накапливая кинетическую энергию. При сборке и разборке резьбовых соединений, расположенных в вертикальной плоскости, ведущая полумуфта 3 расположена сверху якоря 9 и при разгоне электродвигателя 5 вращается на подшипниках 7, если момент затяжки резьбового соединения превышает остаточный момент электромагнитной муфты 2. Если же момент затяжки (при свободном навинчивании) резьбового соединения меньше остаточного мвмента муфты 2, то вместе с ведущей полумуфтой 3 вращаются ведомая полумуфта 6 и шпиндель 1. По истечении времени Т1 программным блоком 15 и узлом 12 питания скстетл 11 управления отключается электродвигатель 5, а программным блоком 15 и узлом 13 питания подается постоянное напряжение на катушку возбуждения муфты 2. Якорь 9 сжимает фрикционные диски, и накопленная кинетическая энергия маховиком и электродвигателем 5 благодаря резко возросшему трению в пакете фрикционных дисков выделяется на шпинделе 1 в виде импульса крутящего момента.Величина этого импульса момента при постоянной величине запасенной энергии в маховике и электродвигателе 5 зависит от времени выделения этой энергии на шпинделе 1. т.е. от ноемени нарастания и окончательного усилия сжатия фрикционньох дисков, которые зависят от скорости изменения и окончательной величины тока, протекающего по катушке муфты 2. По истечении времени Т2 катушка электромагнитной муЛты 2 отключается от узла 13 питания (регулируемого источника постоянного тока) и подключается на время ТЗ к блоку 14 размагничивания. При этом на катушку электромагнитной муфты 2 подается переменное напряжение и под действием создаваемого переменного магнитного потока ее фрикционные диски и якорь 9 вибрируют с частотой напряжения, питающей катушку сети. Оста-точный магнитный поток, создающийся после отключения муфты 2 от узла 13 питания, размагничивается, а фрикционные диски, вибрируя, отдаляются друг от друга и тем самлм исключае ся действие сил молекулярного сцеп , ления между дисками на величину ос таточного момента муфты 2. По истечении времени ТЗ снова включается электродвигатель 5 на время Т1. Хакой порядок работы элементов гайковерта автоматически осу ществля тся с помощью програломного блока 15 система 11 управления. При горизонтальном расположении шпинделя 1 и электромагнитной муфты 2 режим работы гайковерта остается таким же, как и при вертикальном ра положении этих элементов. Предлагаемый гайковерт позволяет осуществлять сборку и разборку резь бовых соединений, расположенных в вертикальных и горизонтальных плоскостях, без увеличения мощности эле тродвигателя при высоких производительности и КПД гайковерта. Кроме того, в гайковерте обеспечивается высокая точность соосной установки ведомой и ведущей полумуфт электромагнитной муфты, необходимая для ее нормальной работы, вследствие того, что обе полумуфты устанавливаются на одном шпинделе. 404 Формула изобретения Гайковерт, содержащий корпус, размещенные в нем электродвигатель, шпиндель с рабочей головкой, узел контроля и регулирования крутящего момента s виде электромагнитной фрикционной муфты, ведомая полумуфта которой размещена на атинделе, систему управле 1ия с програкашым блоком формирования импульсов включения электромагнитной муфты и электродвигателя, электродинамического торможения последнего и узла контроля и регулирования крутящего момента, а ведущая полумуфта выполнена в виде маховика, отличающийся тем, что, с целью повьааения эффективности, он снабжен кинематической связью, соединяющей выходной вал электродвигателя с ведущей полумуфтой, которая размещена посредством тел качения на шпинделе, а система управления включает в себя блок размагничивания электромагнитной «уфты, соединенный с программным блоком. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР по заявке 2516378/25-28, кл. В 25 В 21/00, 1977, 2.Авторское свидетельство СССР о заявке 2834683/25-28 л. В 25 В 21/00, 1979 (прототип).
Г
/Л
15
.J
«
S
S 1
rj
л
«3
Л.
