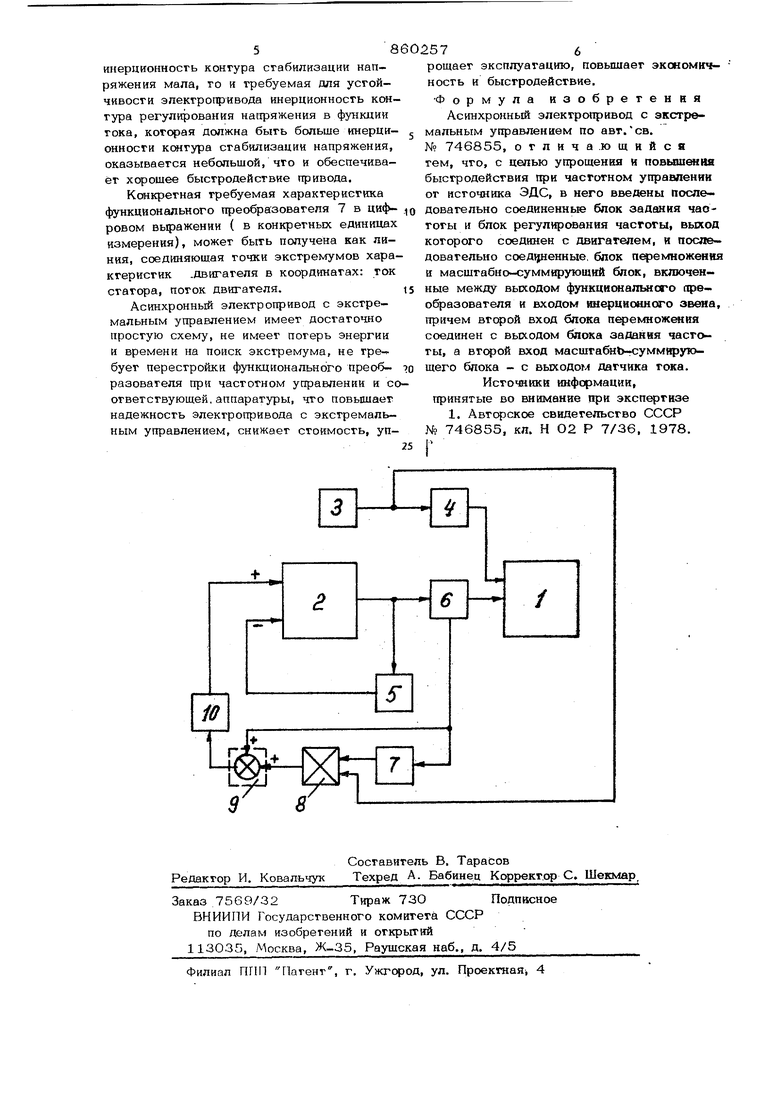
Иаобрегение относится к электротехнике и может быть использовано для управления частогно-регулируемым асинхронным электроприводом с короткозамкиутым двигателем при питании его от источникаЭДС По основному авт. св. N 746855 известен асинхронньш электропривод с экстремальным управлением, содержащий асинхронный электродвигатель, подключенный к блоку регулирования напряжения, к входу которого подключен датчик напряжения и экстремальный регулятор минимизации тока, вход которого соединен с датчиком тока двигателя, при этом экстремальный регулятор выполнен в виде последовательно соединенных функционального преофа- зователя с экспоненциальной характеристикой и инерционного звенаГ.. При использовании этого электропривода для частотного уа{:швления путем введения блоков задания и регулирования частоты необходимо для каждого нового зна чения частоты проиаводить перестройку функционального преобрпаователя (например, меняя или переключая стабилитрсжы и резисторы в схеме преобразователя в случае его исполнения в виде обычного резисторно-стабилитронного блока нелинейности), так как экстремальные характердсгики двигателя при переменкой частоте являются многозначными в функции напряжения. Это усложняет, удорожает электропривод (необходима дополнительная аппаратура для перестройки функционального преобразователя), не позволяет осуществлять плавное регулирование частоты (перестройка преобразователя возможна только дискретная) и снижает быстродействие привода (на перестройку преобразователя требуется время). Цель изобретения - упрощение и повышение быстродействия асинхронного электропривода с экстремальным управлением при частотном управлении от источника эдс. Для достижения этой цели в электропривод введены последовательно еоединенные блок задания частоты и блок регул и3рования частоты, вььход когорого соедянеи с двигагелем, и последовательно соединен ные блок перемножения и масштабно-суммируюший блок, включенные между выходом функционального преобразователя и входом инерционного звена, при этом вто рой вход блока перемножения соединен с выходом блока задания частоты, а второй вход масштабно-сумм фующего блока - с вькодом датчика тока. На чертеже представлена блок-схема асинхронного электропривода с экстремаль ным управлением. Асинхронный электропривод с экстремальным управлением содержит асинхронный электродвигатель 1, подключенный к блоку 2 регуЛ1фования напряжения и к последовательно соединенным блоку 3 задания частоты и блоку 4 регулирования час тоты. К одному входу блока 2 регулирова ния напряжения пошшючен выход датчика 5 напряжения. Второй вход блока 2 регулирования напряжения пошшючен к выходу датчика 6 тока через последовательно соединенные функциональный преобразовагель 7 с экспоненциальной характерисгикой, выполненный, например в виде обычного резисторно-стабилигронного блока не линейности ,блока 8 перемножения, в качестве которого может быть использован, например блок аналогового перемножения сигналов, выполненный по любой из известных схем, в частности, на полевых транзисторах и интегральном усилителе; масштабно-сумм1фующий блок 9, построенный, например как суммирующий усилитель, и инерционное звено 10. При этом второй вход блока 8 перемножения соединен с выходом блока 3 задания частоты, а второй вход масштабно-суммирующего блока 9 - с выходом датчика 6 тока. Для acfflixpoHHoro дветателя, работающего при изменяемых частоте и напряжении на его статоре, при любой нагрузке, на его валу всегда может быть найдено такое значение потока, которое обеспечит минимум потребляемого тока. Эта зависимость между минимальными значениями гока и оптимальными значениями потока, реализуемая посредством функционального преобразователя 7, не зависит от частоты и является единственной для каждого двигателя и имеет вид экспоненты. В задачу блока 8 перемгюжения и масштабно-суммирующего блока 9 входит вычисление оп тимального значения напряжения на двига теле при переменной частоте и нагрузке, соогветствующего оптимальному значению noroKQ. Посредством блока 8 производит57ся вычисление требуе 1ой )Д( статора двигателя в соответствии с соотношением Е (Д апт - о тимальное значение потока, задаваемое функциональным преобразователем 7; f - текущее значение частоты, задаваемое блоком 3 задания частогь). Пос{)едством блока 9 производится приближенное вычисление требуемого значения напряжения на статоре двигателя по соотношению U нопт + ото задаваемое оптимальное значение напряжения отрабатывается блоком 2 регулирования напряжения. Точность вычисления требуемого значения напряжения находится в пределах Допустимого отклонения от точного оптимального значения (минимум тока несколько размыт, что допускает отклонение от оптимального значения потока на +1О%). Достаточная точность вычисления требуемого значения на;фя кения обусловлена тем, что при высоких частотах , а при малых частогах, где Е соизмеримо фазовый сдвиг между напряжением и ГОКОМ практически отсутствует. При увеличении нагрузки при любой частоте возрастает ток статора асинхронного двигателя 1, т.е. увеличивается сигнал с датчика 6 тока, который подается на функЦиональ)1ый гфеобразователь 7 с экспоненциалыюй характеристикой. Возросший на выходе функционального (феобразователя 7 сигнал поступает на вход блока 8 перемножения, где перемножается с сигналом частоты, снимаемым с выхода блока 3 задания частоты. Возросший сигнал с выхода блока 8 перемножения поступает на вход масштабмо-сумм фующего блока 9, посредством которого этот сигнал склады-оаегся в соогвегствуюшем масштабе с сигналом с выхода датчика 6 тока. Полученный таким образом сигнал с выхода блока 9 поступает через инерционное звено 10 на вход блока 2 регулирования напряжения. В результате напряжение на двигателе 1 увеличивается до тех пор, пока не достигнет значения, близкого к оптимальному, соответствующему минимальному значению тока статора при моменте на валу двигателя 1. Заданное таким образом оптимальное значение наряжения поддерживается за счет жесткой отрицательной обратной связи по напряжению,реализуемой датчиком 5 нагфяжения, выход которого подключен к первому входу блока 2 регул фования на1тряжения. При сбросе нагрузки ток двигателя уменьшается, что приводит к уменгзшению нагфяжения до нового оптимального значения. Поскольку
инерционносгь контура стабилизации напряжения мала, то и требуемая для устойчивости электропривода инерционность контура регулирования настряжения в функции тока, которая должна быть больше инерционности ксжтура стабилизации напряжения, оказывается небольшой, что и обеспечивает хорошее быстродействие привода.
Конкретная требуемая характеристика функционального преобразователя 7 в цифровом вьфаженни ( в конкретных единицах измерения), может быть получена как линия, соединяющая точки экстремумов характеристик .двигателя в координатах: ток статора, поток двигателя.
Асинхронный электропривод с экстремальным управлением имеет достаточно простую схему, не имеет потерь энергии и времени на поиск экстремума, не требует перестройки функционального преобразователя при частотном управлении и соответствующей, аппаратуры, что повышает надежность электропривода с экстремальным управлением, снижает стоимость, уп-
рощает эксплуатацию, повышает экономкиность и быстродействие. Формула изобретения Асинхронньй электропривод с экстремальным управлением по авт.св. № 746855, отлича.ющнйся тем, что, с цепью упрощения и повышения быстродействия при часготном управлении от источника ЭДС, в него введены последовательно соединенные блок задания частоты и блок регулирования часгогы, выход которого соединен с двигателем, и последовательно соеД1|ненные, блок п емноження и масштабио-суммирующнй блок, включенные между выходом функциокалыюго преобразователя и входом 1шерциош1ого звеиа, причем второй вход блока п емножетшя соединен с выходом блока задания частоты, а втсрой вход масштабнЬ-гсумм{фующего блока - с вькодом датчика тока. Источники инфс мации,
принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 746855, кл. Н О2 Р 7/36, 1978.

| название | год | авторы | номер документа |
|---|---|---|---|
| Асинхронный электропривод с экстремальным управлением | 1983 |
|
SU1117812A2 |
| Асинхронный электропривод с экстремальным управлением | 1978 |
|
SU888319A2 |
| Частотный асинхронный электропривод с экстремальным управлением | 1985 |
|
SU1287250A1 |
| Асинхронный электропривод с экстремальным управлением | 1977 |
|
SU746855A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| Частотно-регулируемый электропривод | 1985 |
|
SU1288887A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2069034C1 |
| Устройство для управления асинхронным частотно-регулируемым электродвигателем | 1990 |
|
SU1793526A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
