электродвигателя; rj - приведенное сопротивление ротора; Р„ - номинальная мощность электродвигателя; Uf, - номинальное фазное напряжение электродвигателя; го, число фаз; рн номинальное абсолютное скольжение; ftg- абсолютное скольжение, при котором , К, ;
+ ; О . п k, Блок 3 подает упратт
лягощий сигнал oi , пропорциональный частоте вращения ЭД 1, в ПЧ 2 посредством блока 6. Одновременно пос1
Изобретение относится к электротехнике, а именно к частотно-регулируемым электроприводам, и может быть использовано в приводах с экстремальным управлением, минимизирующим потребляемый двигателем ток.
Цель изобретения - упрощение электропривода и повышение быстродейст ВИЯ при статической механической нагрузке вида |li w .
На-фиг.1 представлена блок-схема частотно-регулируемого электропривода; на фиг,2 - график зависимости; на фиг.3 и 4 схемы функционального преобразователя.
Электропривод содержит асинхронный электродвигатель 1, преобразователь 2 частоты, выполненный в виде последоват епьно соединенных выпрямителя 3, предназначенного для подключения к сети, И инвертора 4, выходы которого подключены к асинхронному электродвигателю 1, Электропривод содержит также блок 5 задания частоты, выходом соединенного с блоком 6
управления инвертором, и функциональ ньй преобразователь 7, подключенньй к блоку 8 управления вьтрямителем.
. Функциональный преобразователь по существу является экстремальным регулятором минимизации тока статора и реализует зависимость вида
У ,
где У - относительное напряжение двигателя;
288887
редством ФП 7 управляющий сигнал подается в блок 8. С выхода ФП 7 снимается сигнал, пропорциональный оптимальному напряжению ЭД 1, при котором ток статора принимает минимально возможное значение при данной нагрузке, связанной с относительной частотой вращения зависимостью |U ()i. Изобретение позволяет экономить электроэнергию за счет реализации экстремального способа управления, минимизирующего ток статора при вентиляторной нагрузке. 4 ил.
5
ОС - относительная частота питания ;
К е
е
X,
/uJm,(l-(,) ; Х,/Х,;
индуктивные сопротивления двигателя; приведенное сопротивление ротора; номинальная мощность двигателя;
- номинальное фазное напряжение двигателя; - число фаз; РЦ- номинальное абсолютное скольжение, при котором
1 + и Х г PU m
20
К, р,,, ; m - -5:Oin i4.
Электропривод работает следующим образом.
Управляющее напряжение с выхода за- датчика 5 частоты поступает на вход
блока 6 управления частотой инвертора 4. Его величина пропорциональна час- тоте напряжения питания электродвигателя 1. Так как относительный момент двигателя U связан с относительной
частотой питающего напряжения соотношением |ц (;, то появляется возможность регулировать напряжение электродвигателя так, чтобы его ток был минимальным во всем диапазоне регулирования угловой скорости. Для
этого управляющий сигнал с выхода блока 5 задания частоты подается также
. I
на вход функционального преобразователя 7, выходной сигнал которого прО порционален оптимальному относительному напряжению статора двигателя (fg при данной нагрузке р . Таким образом, при частотном регулировании угловой скорости двигателя в широком диапазоне напряжение питания регулируется так, что при данной нагрузке ток имеет минимальное значение,
Для нахождения зависимости у f(o(,), реализуемой функциональным преобразователем 7, можно воспользоваться методикой, согласно которой
1 LfliPtSliEr
Yonr uj т;(1-р;)(Ьопг
где Р - номинальная мощность двигателя ;
т, - число фаз;
р„ - номинальное абсолютное сколжение;
Оц - номинальное фазное напряжение;г - приведенное сопротивление
ротора; Х,и Хр - индуктивные сопротивления
двигателя.
Оптимальное абсолютное скольжение f (ai) определяется путем графоаналитического рещения уравне- ния . -----.,
v о (.
I dcf Ч З
да p он /I2H
Хг
.2
v-J У Ло P относительный поток двигателя; i - относительный ток намагничивания; Xj - приведенное индуктивное сопротивление ротора; IOH - номинальный ток намагничивания; 1 номинальный приведенный ток ротора.
Задаваясь рядом значений |U , находим в точках пересечения кривых
К((, - и 2(1+2 с)(Ц /Ср значения соответствующих оптимальных потоков ipa и далее, используя равенство (boftr находим зависимость /3(jf, f(fii), которую используем для расчета характеристики функционального преобразователя 7.
В общем случае зависимость („f f ((U) линейная на участке О, 1 fli .« и аппроксимируется формулой
ДИМ
+fi()
Тогда, учитывая, что (Ц oi, нахо ч
288887
I опт
4кХ-Й%
is
25
где К, , -,% ; К Р, ,,(1-/5н) 5
п
РО - параметр аппроксимации, при ко- Iд
тором ш 0; ; О п 4.
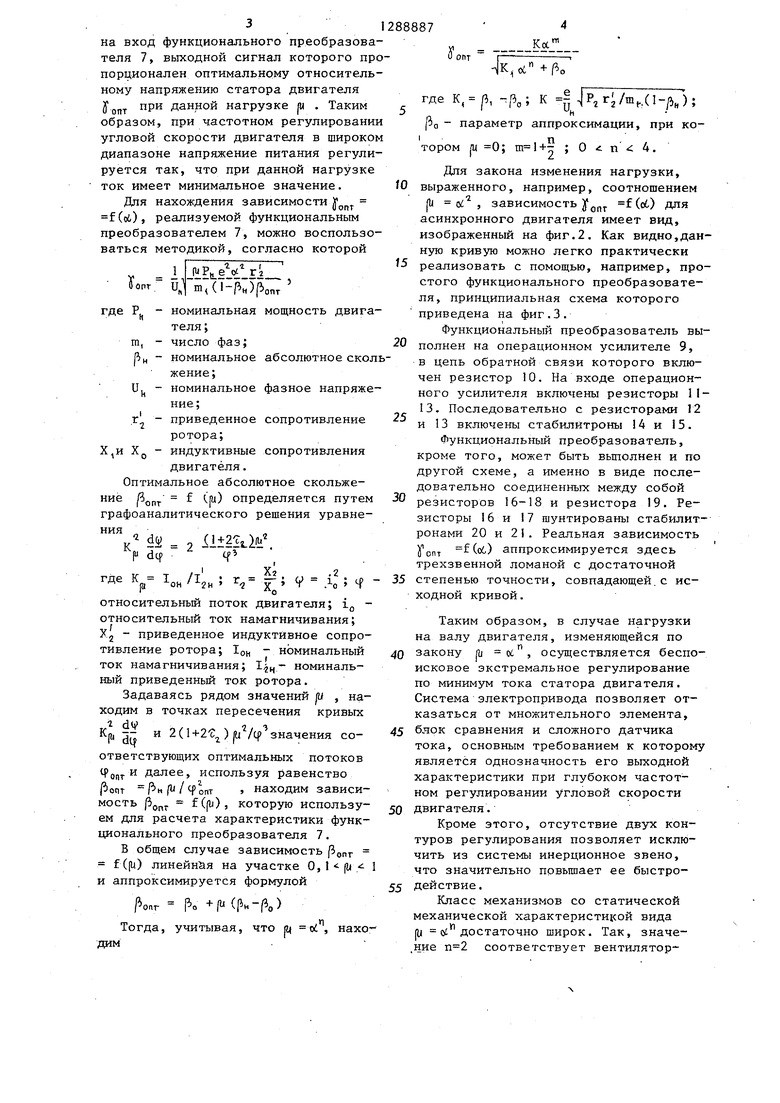
Для закона изменения нагрузки,
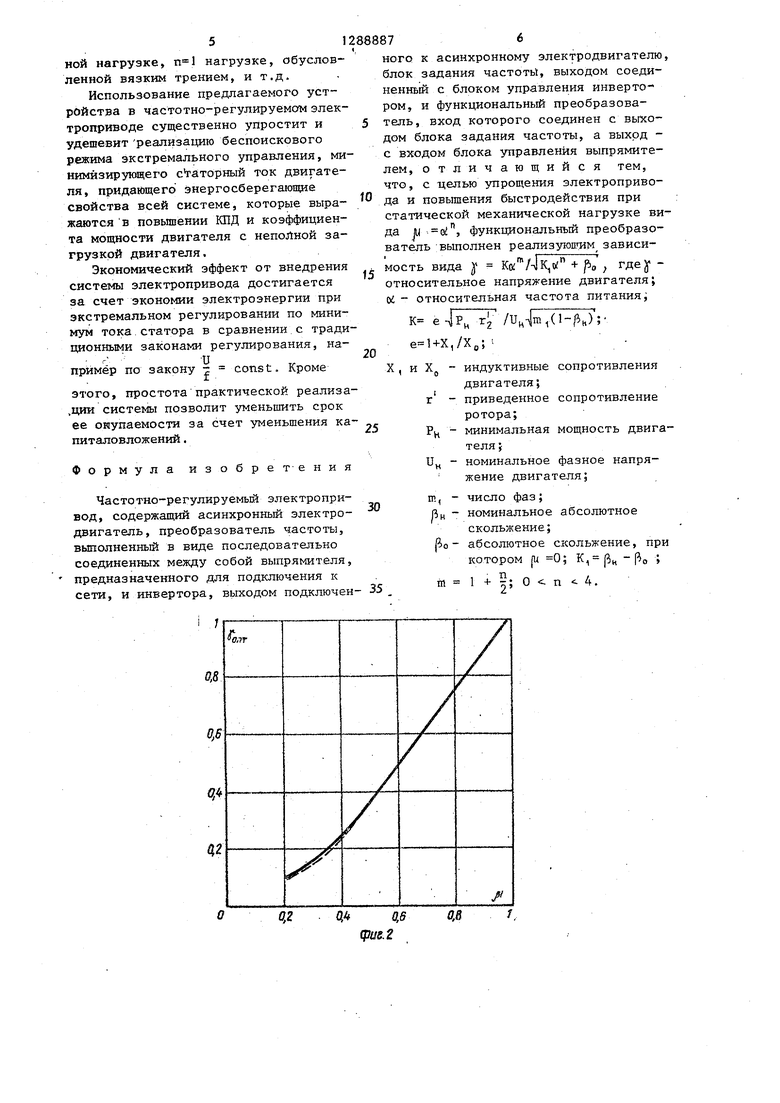
fO выраженного, например, соотношением (II к; , зависимость Jfjj f(o6) для асинхронного двигателя имеет вид, изображенный на фиг.2, Как видно,данную кривую можно легко практически реализовать с помощью, например, простого функционального преобразователя, принципиальная схема которого приведена на фиг.З.
Функциональны} преобразователь вы20 полнен на операционном усилителе 9, в цепь обратной связи которого включен резистор 10. На входе операционного усилителя включены резисторы П- 13. Последовательно с резисторами 12 и 13 включены стабилитроны 14 и 15.
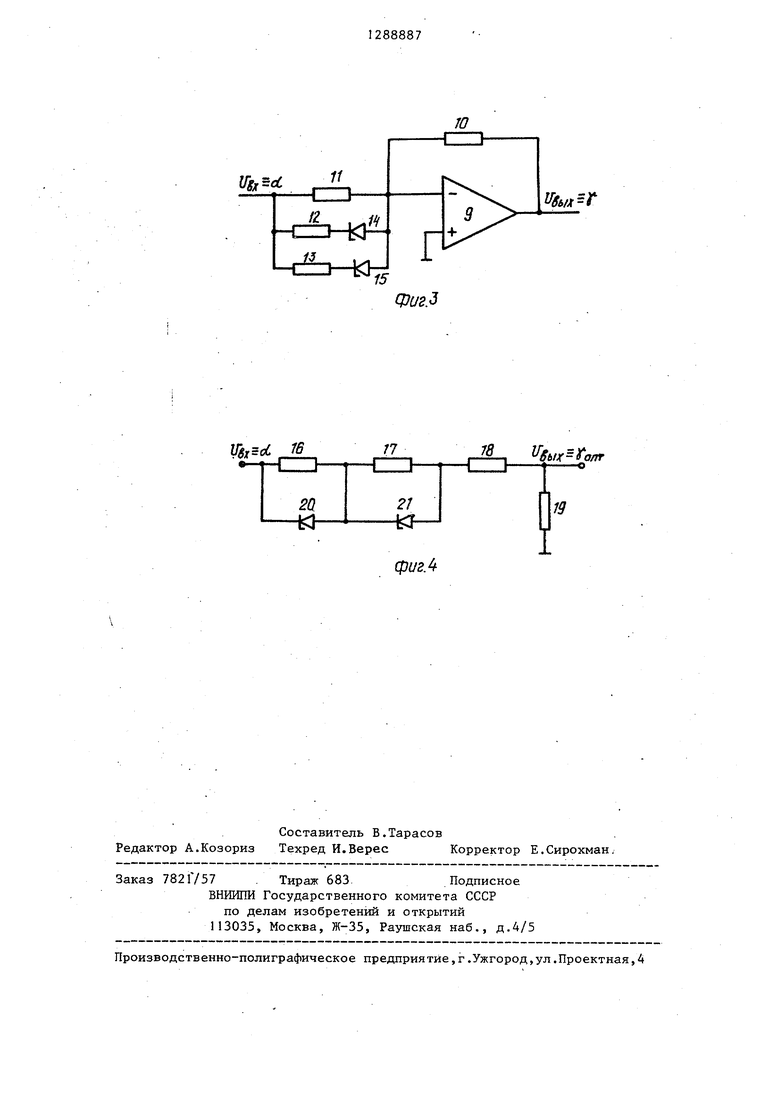
Функциональный преобразователь, кроме того, может быть вьтолнен и по другой схеме, а именно в виде последовательно соединенных между собой
резисторов 16-18 и резистора 19. Резисторы 16 и 17 шунтированы стабилитронами 20 и 21. Реальная зависимость УР„ f(c6) аппроксимируется здесь трехзвенной ломаной с достаточной
35 степенью точности, совпадающей.с исходной кривой.
Таким образом, в случае нагрузки на валу двигателя, изменяющейся по
0 закону fU oi , осуществляется беспоисковое экстремальное регулирование по минимум тока статора двигателя. Система электропривода позволяет отказаться от множительного элемента,
5 блок сравнения и сложного датчика
тока, основным требованием к которому является однозначность его выходной характеристики при глубоком частотном регулировании угловой скорости
0 двигателя.
Кроме этого, отсутствие двух контуров регулирования позволяет исключить из системы инерционное звено, что значительно повышает ее быстро5 действие.
Класс механизмов со статической механической характеристикой вида (U «yi достаточно широк. Так, значе- ,ние соответствует вентилятор5
ной нагрузке, нагрузке, обусловленной вязким трением, и т.д.
Использование предлагаемого устройства в частотно-регулируемом электроприводе существенно упростит и удешевит реализацию беспоискового режима экстремального управления, ми нимизирукщего с аторный ток двигателя, придающего энергосберегающие свойства всей системе, которые выражаются в повышении КПД и коэффициента мощности двигателя с неполной загрузкой двигателя.
Экономический эффект от внедрения системы электропривода достигается за счет экономии электроэнергии при экстремальном регулировании по минимум тока статора в сравнении с традционными законами регулирования, наи
- cons t
Кроме
пример по закону
этого, простота практической реализ ,ции системы позволит уменьшить срок ее окупаемости за счет уменьшения к питаловложений.
Формула изобретения
Частотно-регулируемый электропривод, содержащий асинхронный электродвигатель, преобразователь частоты, выполненньй в виде последовательно соединенных между собой выпрямителя, предназначенного для подключения к сети, и инвертора, выходом подключен-
Q2
0,г Q 0,8 0,в /, tpue2
0
5
0
6
ного к асинхронному электродвигателю, блок задания частоты, выходом соединенный с блоком управления инвертором, и функциональный преобразователь, вход которого соединен с выходом блока задания частоты, а выход - с входом блока управления выпрямителем, отличающийся тем, что, с тделью упрощения электропривода и повышения быстродействия при статической механической нагрузке вида W oi, функциональный преобразователь :выполнен реализующим зависимость вида у где у - относительное напряжение двигателя; oi - относительная частота питания i
К е-., ,/Х,
-,(-f)
X. и X, 0
5
индуктивные сопротивления двигателя;
приведенное сопротивление ротора;
минимальная мощность двигателя ;
номинальное фазное напряжение двигателя;
число фаз;
номинальное абсолютное скольжение; - абсолютное скольжение, при котором JU 0; К, РЦ ;
1 + ; О п 4.
г
PU и. т, - И
|;с
ITSi,- .
VSbfX-r
Фиг.З
фиг A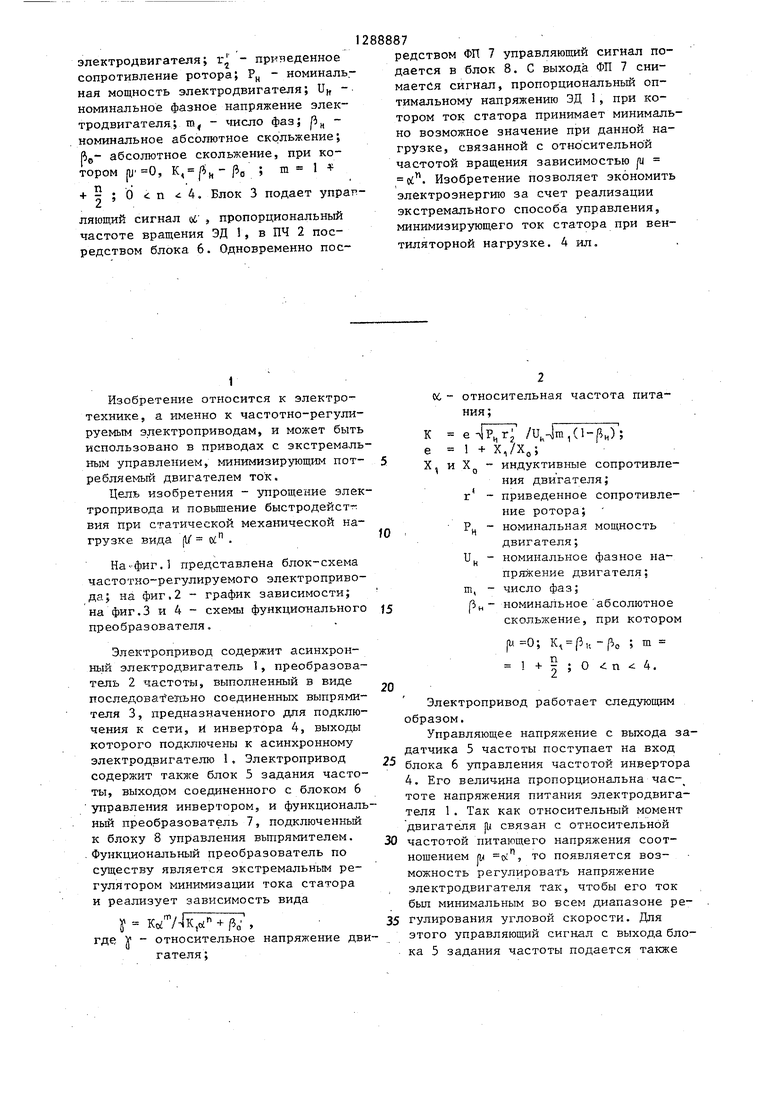
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод переменного тока | 1987 |
|
SU1476590A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Электропривод переменного тока | 1986 |
|
SU1431027A1 |
| СПОСОБ ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2016 |
|
RU2626325C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С ЭКСТРЕМАЛЬНЫМ УПРАВЛЕНИЕМ | 1992 |
|
RU2069034C1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1990 |
|
SU1746507A1 |
| Система частотно-регулируемого асинхронного электропривода крано-манипуляторной установки (Система ЧРАП КМУ) | 2023 |
|
RU2820159C1 |
| ЭЛЕКТРОПРИВОД | 2008 |
|
RU2399149C1 |
| Способ управления асинхронным двигателем с фазным ротором | 1987 |
|
SU1408516A1 |
| Частотный асинхронный электропривод с экстремальным управлением | 1985 |
|
SU1287250A1 |
Изобретение относится к электротехнике. Целью изобретения является упрощение схемы электропривода и повышение быстродействия при-статической механической нагрузке вида (j 0,. Электропривод содержит асинхронный электродвигатель (АД) 1, к которому подключен выход инвертора (И) 4, преобразователя 2 частоты (ПЧ). Выпрямитель 3 ПЧ 2, соединенный последовательно с И 4, подключен к сети. Выход блока 5 задания частоты подключен к блоку 8 управления выпрямителем через функциональньгй преобразователь (ФП) 7, а к блоку 6 управления- непосредственно. ФП 7 реализует зависимость вида у К К, 0 Я cL - относительная частота питания; X. Хо X,, X(j - индуктивные сопротивления К СЛ Фыг.1
| Асинхронный электропривод с экстремальным управлением | 1977 |
|
SU746855A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Заявка ФРГ № 3004924, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Асинхронный электропривод с экстремальным управлением | 1979 |
|
SU860257A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
