Изобретение относится к автоматизации сварочных, сборочных и прессовых производств и может быть использовано для загрузки рабочих позиций многопозиционного оборудования листовыми заготовками с загибами по периметру.
Известно устройство для подачи деталей, содержащее магазин для стопы деталей, толкатель стопы, снабженный приводом, выполненным в виде силового цилиндра со штоком, зубчатой рейкой и взаимодействующих с ней собачек, а также каретку, охватываюремещения вдоль нее, тормозное устройство, смонтированное п каретке, выполненное в виде силопого цилиндра и шарнирно закрепленной но его под пружиненном штоке тормозной накладки,
КОНТЗКТИРУЮЩСП С ТЫЛЬНОЙ СТОроНОМ
ной из собачек, датчиком полисемия верхнего крзп стопы и блоком ллектг-о- управляемых клапанов с системой управления, связывающих датчик с цилиндрами толкателя и тормозного уг;л- ройстоа, о тыльная сторон; соба - кп, контактирующая с тормозной накла . ой 5 выполнена со скосом, плоскость кото-- рого обращена в сторону стопы заготовок (авт„ св. № 980902, KJK В 21 D k3/2k),
Недостаток устройства заключается о ограниченных функциональных возможностях из-за жестко профилированного шага зубьев рейки, определяющей шаг подъема стопы, что вызывает при сме не толщины заготовки нестабильное положение штока привода подъема„ К этому приводит также инерционность системы управления.
Известно также устройство для отделе: н- я листа от стопы (авт. ев, Р 709225, кл. В 21 I) (3/2.4), содержащее размещенный на основании стол длп установки стопы и толкатель для подачи стопы в зону разделения листов, связанный с приводом, а так- же каретку с упором, установленную из основании под столом; причём упор взаимодействует с отделенным листом, и штангу с зубьями, связанную с тол-
5
рычага, возможна только переналадка, а подготовка устройства к загрузке стопы листог; ведется вручную, при этом устройстпо посредством штанги перемещает по столу всю столу листов при их фрикционном воздействии друг о друга, что приводит к повышенным динамическим нагрузкам и самопроизвольному отделению нескольких листов одновременно. При этом нарушается работоспособность устройства„
Целью изобретения является расширение функциональных возможностей устройства, за счет надежного отделе™ иия Г-образных за готовок„
Указанная цель достигается те.м,-.- что устройство для отделения листовых заготовок от стопы, содержащее смонтированный на основании корпуса опор™ ный стол, лоток, размещенный возле стола, механизм для перемещения крайней заготовки к лотку с толкателем; установленным с возможностью перемещения в вертикальной плоскости, привод вышеуказанного механизма в виде силового цилиндра, корпус которого размещен в корпусе устройства, а шток жестко с-пзан с толкателем и систему управления . снабжено приводным меха низмом шагового перемещения толка™ теля в вертикальной плоскости, выполненный в виде вертикально уста- позленного в корпусе ходового винта, верхний конец которого свободно установлен в корпусе, гайки, размещенной на ходовом винте, обгонной муфты с зубчатым венцом на боковой поверхности наружной полумуфты, внутренняя

| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Устройство для отделения заготовок от стопы | 1986 |
|
SU1360862A1 |
| Поворотно-делительный стол | 1983 |
|
SU1177137A1 |
| Устройство для подачи заготовок | 1987 |
|
SU1648729A1 |
| Устройство для отделения верхнего листа от стопы и подачи его в зону обработки | 1981 |
|
SU963641A1 |
| Устройство для отделения верхнего листа от стопы | 1978 |
|
SU747590A1 |
| Дыропробивной револьверный пресс | 1985 |
|
SU1286360A1 |
| Устройство для отделения верхнего листа от стопы и подачи его в зону обработки | 1980 |
|
SU904847A1 |
| Автоматическое загрузочное устройство | 1984 |
|
SU1220783A1 |
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
Использование: для автоматизации сборочных, сварочных или прессовых производств при загрузке рабочих позиций многопозиционного оборудования листовыми заготовками с загибами по периметру- Сущность изобретения: устройство содержит смонтированный на основании корпуса опорный стол, лоток, размещенный возле стола, механизм для перемещения крайней заготовки с толкателем, установленным с возможностью перемещения в вертикальной плоскости, привод вышеуказанного механизма в виде силового цилиндра, корпус которого размещен в корпусе устройства, а шток жестко связан с толкателем, приводной механизм шаго - вого перемещения толкателя в вертикальной плоскости, выполненный в виде вертикально установленного в корпусе ходового винта, верхний конец которого свободно установлен в корпусе, гайки, размещенной на ходовом винте, обгонной муфты с зубчатым венцом на боковой поверхности наружной полумуфты, внутренняя полумуфта которой жестко связана с вышеуказанной гайкой, зубчатой рейки, свободно установленной в корпусе с возможностью взаимодействия с наружной полумуфтой и конец которой сопряжен с толкателем посредством тяги, при этом привод этого механизма выполнен в виде вертикально закрепленного на основании корпуса силового цилиндра, шток которого смонтирован на нижнем конце ходового винта, а корпус горизонтально расположенного силового цилиндра жестко связан с ходовым винтом, а на корпусе устройства установлен электромеханический фиксатор, сопряженный с верхней частью ходового винто. 1 з.п. ф-лы, 3 ил. XJ Os со ел ю
ковании и связанным с приводом двуплечим рычагом/ один конец которого связан с кареткой, а на другом за креплена подпружиненная собачка, вза имодействующая с зубьями штанги, а расстояние между зубьями штанги равно шагу перемещения толкателя и соотношение длин плеч рычага пропорционально соотношению длины хода каретки и длины шага перемещения толкателя
Данное устройство является прототипом.
Недостаток прототипа заключается в ограниченных функциональных возможностях и недостаточной надежности работы. Это вызвано тем, что регулировка устройства для смены толщины выдаваемых листов исключена из-за жесткой кинематики штанги и двуплечего
0
вышеуказанной гайкой, зубчатой рейки, свободно расположенной в корпусе с возможностью взаимодействия с наружной полумуфтой и конец которой сопряжен с толкателем посредством тяги, при этом привод этого механизма выполнен в виде вертикально закрепленного на основании корпуса силового цилиндра, шток кторого смонтирован на нижнем конце ходового винта, а корпус горизонтально расположенного силового цилиндра жестко связан с ходовым винтом, при этом устройство снабжено и. электромеханическим фиксатором, сопряженным с верхней частью ходового винта.
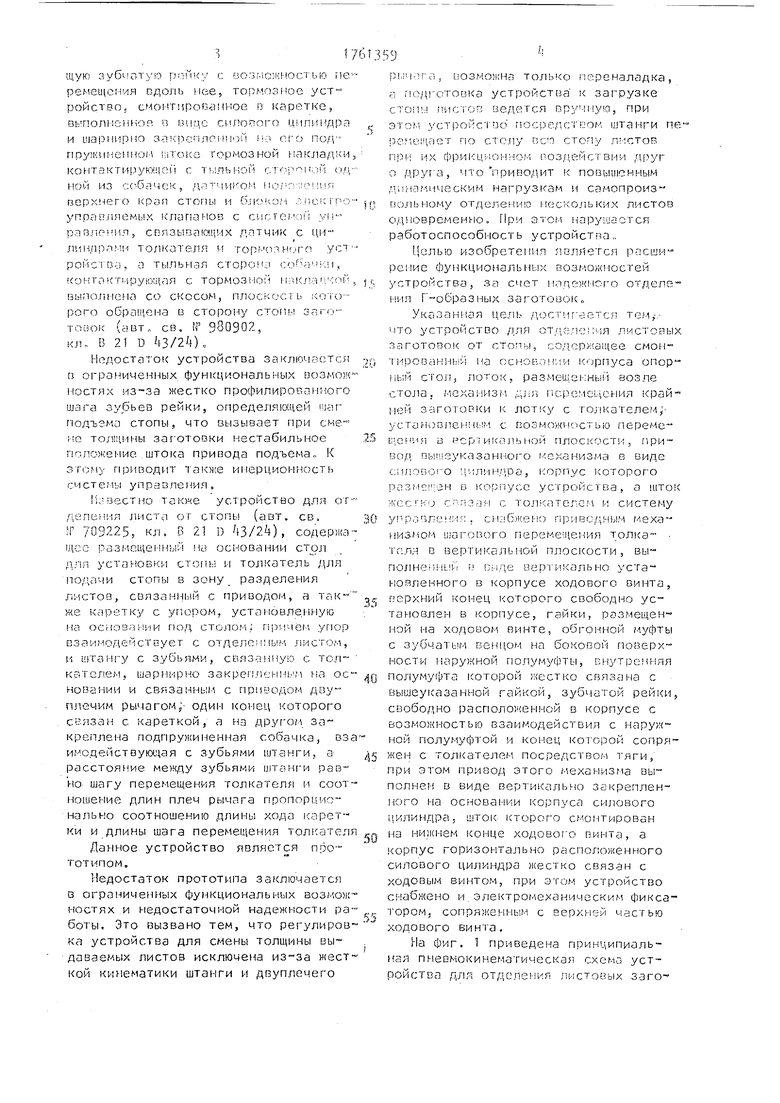
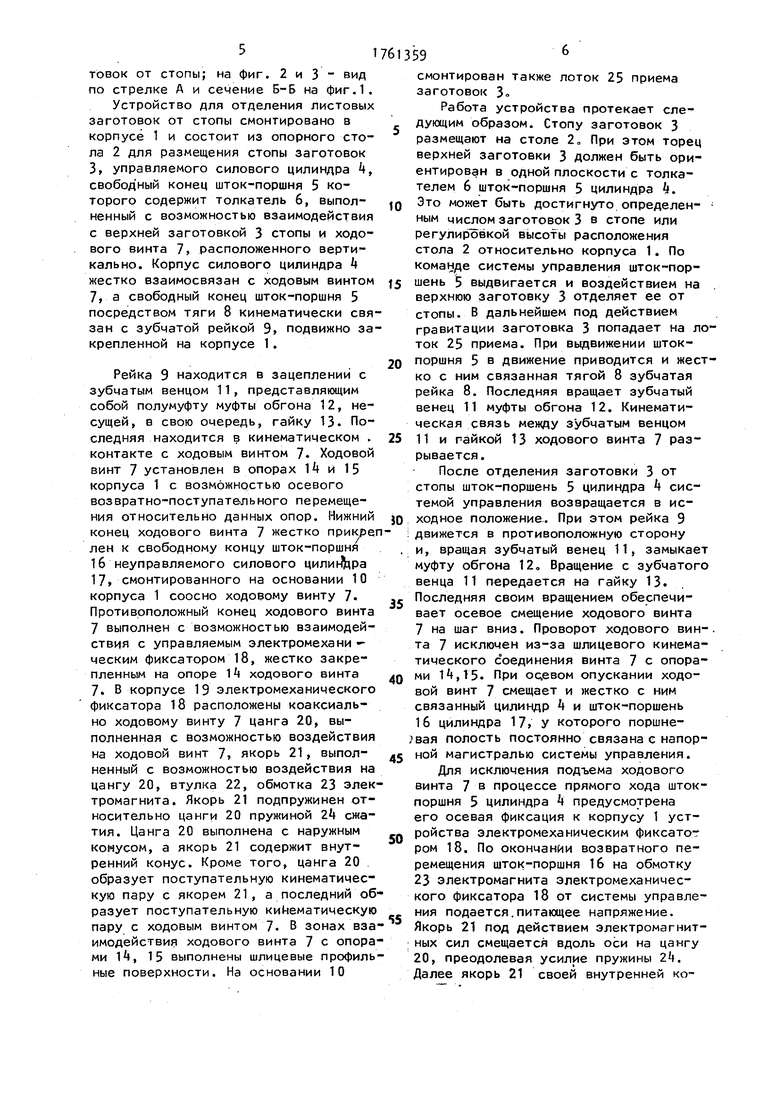
На фиг. 1 приведена принципиальная пиевмокинематическая схема устройства для отделения листовых з-зго5
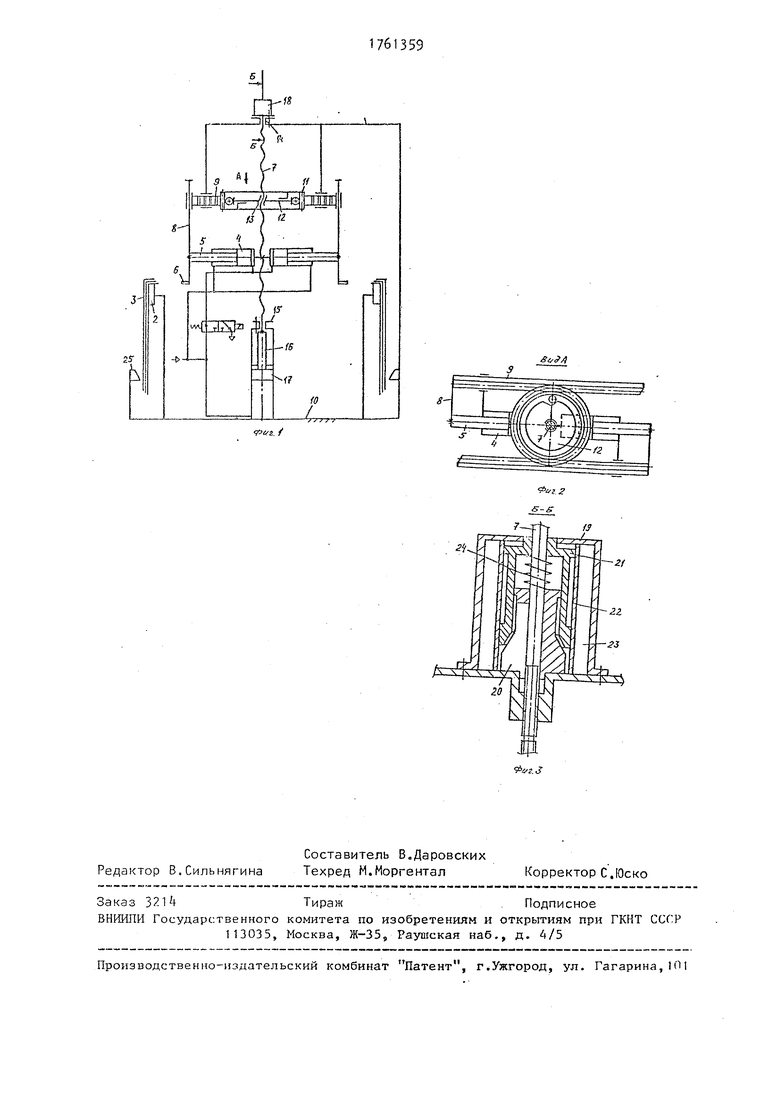
товок от стопы; на фиг. 2 и 3 - вид по стрелке А и сечение Б-Б на фиг.1. Устройство для отделения листовых заготовок от стопы смонтировано в корпусе 1 и состоит из опорного стола 2 для размещения стопы заготовок 3, управляемого силового цилиндра k, свободный конец шток-поршня 5 которого содержит толкатель 6, выполненный с возможностью взаимодействия с верхней заготовкой 3 стопы и ходового винта 7 расположенного вертикально. Корпус силового цилиндра k жестко взаимосвязан с ходовым винтом 7, а свободный конец шток-поршня 5 посредством тяги 8 кинематически связан с зубчатой рейкой 9, подвижно закрепленной на корпусе 1.
Рейка 9 находится в зацеплении с зубчатым венцом 11, представляющим собой полумуфту муфты обгона 12, несущей, в свою очередь, гайку 13. Последняя находится в кинематическом контакте с ходовым винтом 7. Ходовой винт 7 установлен в опорах 14 и 15 корпуса 1 с возможностью осевого возвратно-поступательного перемещения относительно данных опор. Нижний конец ходового винта 7 жестко прикрелен к свободному концу шток-поршня 16 неуправляемого силового цилиндра 17 смонтированного на основании 10 корпуса 1 соосно ходовому винту 7. Противоположный конец ходового винта 7 выполнен с возможностью взаимодействия с управляемым электромехани - ческим фиксатором 18, жестко закрепленным на опоре 1 ходового винта 7. В корпусе 19 электромеханического фиксатора 18 расположены коаксиаль- но ходовому винту 7 цанга 20, выполненная с возможностью воздействия на ходовой винт 7, якорь 21, выполненный с возможностью воздействия на цангу 20, втулка 22, обмотка 23 электромагнита. Якорь 21 подпружинен относительно цанги 20 пружиной 2 сжатия. Цанга 20 выполнена с наружным конусом, а якорь 21 содержит внутренний конус. Кроме того, цанга 20 образует поступательную кинематическую пару с якорем 21, а последний образует поступательную кинематическую пару с ходовым винтом 7. В зонах вза имодействия ходового винта 7 с опорами 1, 15 выполнены шлицевые профильные поверхности. На основании 10
10
15
20
25
30
35
40
45
50
«
смонтирован также лоток 25 приема заготовок 3«
Работа устройства протекает следующим образом. Стопу заготовок 3 размещают на столе 2„ При этом торец верхней заготовки 3 должен быть ориентирован в одной плоскости с толкателем 6 шток-поршня 5 цилиндра k. Это может быть достигнуто определен- ным числом заготовок 3 в стопе или регулировкой высоты расположения стола 2 относительно корпуса 1. По команде системы управления шток-поршень 5 выдвигается и воздействием на верхнюю заготовку 3 отделяет ее от стопы. В дальнейшем под действием гравитации заготовка 3 попадает на лоток 25 приема. При выдвижении шток- поршня 5 в движение приводится и жестко с ним связанная тягой 8 зубчатая рейка 8. Последняя вращает зубчатый венец 11 муфты обгона 12. Кинематическая связь между зубчатым венцом 11 и гайкой 13 ходового винта 7 разрывается .
После отделения заготовки 3 от стопы шток-поршень 5 цилиндра 4 системой управления возвращается в исходное положение. При этом рейка 9 движется в противоположную сторону и, вращая зубчатый венец 11, замыкает муфту обгона 12. Вращение с зубчатого венца 11 передается на гайку 13. Последняя своим вращением обеспечивает осевое смещение ходового винта 7 на шаг вниз. Проворот ходового вин-, та 7 исключен из-за шлицевого кинематического соединения винта 7 с опорами 1,15. При осевом опускании ходовой винт 7 смещает и жестко с ним связанный цилиндр k и шток-поршень 16 цилиндра 17, У которого поршневая полость постоянно связана с напорной магистралью системы управления.
Для исключения подъема ходового винта 7 в процессе прямого хода шток- поршня 5 цилиндра k предусмотрена его осевая фиксация к корпусу 1 устройства электромеханическим фиксатором 18. По окончании возвратного перемещения шток-поршня 16 на обмотку 23 электромагнита электромеханического фиксатора 18 от системы управления подается.питающее напряжение. Якорь 21 под действием электромагнитных сил смещается вдоль оси на цангу 20, преодолевая усилие пружины 2. Далее якорь 21 своей внутренней конусной поверхностью воздействует на наружный конус цанги 20. Лепестки цанги при этой воздействии обжимают наружную поверхность ходового винта 7, исключая возможность его осевого перемещения. Поэтому, несмотря на постоянное усилие вдоль оси со сто™ роны шток-поршня 16 неуправляемого цилиндра 17, ходовой оинг 7 при рабочем ходе шток-поршня 5 неподчиж м. В процессе возвратного хода шгок- поршня 5, когда через рейку 3, венец 11 и гайку 13 требуется опустить на шаг ходовой винт 7, система управления обесточивает обмотку 23 электромагнита. Якорь 21 пружиной 2Ц возвращается в исходное положение, освобождая цангу 20. Лепестки цанги 20 расходятся и ходовой винт 7 освоПо да - ется для осевого перемещения.
После отработки требуемого числа циклов и выдачи всех заготовок 3, электромеханический фиксатор 18 вновь отключается и шток-поршнем 16 цилиндра 15 ходовой винт 7 с цилиндром Ц поднимается на первоначальный уровень расположения первой заготовки 3 стопы на столе 2. При этом движении ходового винта 7 гайка 13 вращается. Данное вращение гайки 13 не передается на зубчатый венец 11 из-за размыкания муфты обгона 12. По окончании подъема ходового винта 7 и цилиндра k подготовлены условия для повторения цикла отделения заготовок от стопы.
Устройство для отделения листовых заготовок от стопы имеет низкую трудоемкость насгройки на измененный типоразмер заготовки, а его подготовка к повторению цикла не требует вмешательства оператора.Кроме того, у устройства исключена нестабильность работы, так как отсутствуют динами- ческие колебания стопы заготовок.
формула изобретения
плоскости, привод указанного механизма в виде силового цилиндра, корпус которого размещен в корпусе устройства, а шток связан с толкателем, и
5 систему управления, отличающееся тем, что, с целью расширения функциональных возможностей за счет надежного отделения Г-образ- ных заготовок, оно снабжено привод0 ным механизмом шагового перемещения толкателя в вертикальной плоскости, выполненным в виде вертикальноуста- новленного в корпусе ходового винта, верхний конец которого свободно установлен в корпусе, гайки, размещенной на ходовом винте, обгонной муфты с зубчатым венцом на боковой поверхности наружной полумуфты, внутренняя полумуфта которой жестко связана с
0 гайкой, зубчатой рейки, свободно расположенной в корпусе с возможностью взаимодействия с наружной полумуфтой, конец которой сопряжен с толкателем посредством тяги, при
5 этом привод этого механизма выполнен в виде вертикально закрепленного на основании корпуса силового цилиндра, шток которого смонтирован на нижнем конце ходового винта, а корпус гори0 зонтально расположенного силового цилиндра жестко связан с ходовым винтом.
5
я
9Э4-2 /
| Теплообменное устройство вращающейся печи | 1977 |
|
SU702225A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
