Изобретение относится к электротехнике, в частности к частотно-регулируемым электроприводам, и может быть использовано в системах управления асинхронных электроприводов (АЭП) с автономным инвертором напряжения (АИН).
Известен способ частотного управления АЭП (Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием / Г.Г. Соколовский. - М.: Академия, 2006. - С. 176-181), который характеризуется формированием амплитуды и частоты выходного напряжения автономного инвертора, питающего асинхронный двигатель, в соответствии с требуемой частотой вращения двигателя, задаваемой в системе управления. Система управления, реализующая этот способ, замкнута по частоте вращения через регулятор скорости (PC), который формирует управляющий сигнал, в зависимости от сигнала рассогласования. Сигнал рассогласования формируется при сравнении сигнала задания и сигнала обратной связи, пропорционального частоте вращения. В качестве сигнала обратной связи используется сигнал датчика скорости (ДС), установленного на валу двигателя. Для сохранения постоянства перегрузочной способности при регулировании частоты вращения, изменение амплитуды и частоты формируемого напряжения, осуществляется в соответствии с законом постоянства потокосцепления статора, для чего используется функциональный преобразователь в канале задания напряжения.
Недостатком является сложность настройки функционального преобразователя в канале управления напряжением статора, а также необходимость в использовании датчика скорости вращения вала электродвигателя для создания замкнутого контура регулирования частоты вращения АЭП.
Известен способ частотного управления АЭП (патент РФ №2402865, опубл. 27.10.2010 г.), характеризующийся тем, что при управлении асинхронным двигателем с короткозамкнутым ротором, питаемым от силового преобразователя, частота скольжения при частотном управлении не является постоянной или изменяющейся пропорционально электромагнитному моменту, а изменяется таким образом, чтобы обеспечить минимальные потери в двигателе, или условный минимум потерь при данных уровнях ограничения напряжения и тока, или максимально реализуемый электромагнитный момент, если заданный момент не реализуем при данных уровнях ограничения напряжения и тока.
Недостатками данного способа являются низкая надежность и ограниченная область применения, что связано с использованием в составе системы управления, которая его реализует, датчика скорости служащего для формирования сигнала обратной связи.
Известен способ частотного управления АЭП (патент РФ 95118545/09, опубл. 10.07.1998 г.), характеризующийся жесткой связью между частотой и напряжением питания асинхронного двигателя посредством введения в канал регулирования напряжения функционального преобразователя, настраиваемого на требуемый закон изменения напряжения на асинхронном двигателе в функции частоты, отличающийся тем, что предварительно снимают характеристику изменения тока статора асинхронного двигателя, управляемого от преобразователя частоты на холостом ходу работы, затем в функциональном преобразователе настраивают начальную точку характеристики на достижение минимального тока статора, а коэффициент усиления канала регулирования напряжения выбирают в соответствии с требуемой жесткостью нагрузочной характеристики электропривода.
Недостатками являются уменьшение надежности и ограничение области применения АЭП, система управления которого реализует предложенный способ, так как в качестве источника сигнала обратной связи используется датчик скорости вращения.
Известен способ частотного управления АЭП (Толочко О.И. Скалярное частотное управление асинхронным электроприводом с улучшенными динамическими характеристиками. / О.И. Толочко, Г.С. Чекавский, П.И. Розкаряка // Електромеханiчнi i енергозберiгаючi системи. - 2012. - Т. 19, №3. - С. 309-312). Этот способ реализуется системой управления электроприводом, который состоит из асинхронного двигателя (АДКЗР), питающегося от автономного инвертора напряжения (АМН). АИН служит источником трехфазного напряжения, которое формируется при помощи широтно-импульсной модуляцией (ШИМ). Амплитуда и частота модулируемого напряжения задается системой управления. Система управления замкнута по скорости через ПИ - регулятор скорости (PC). На вход PC подается сигнал рассогласования между заданной и действительной частотой вращения, формирующийся при сравнении сигнала задания и сигнала текущей скорости. Для получения сигнала соответствующего текущей частоте вращения используется датчик скорости, установленный на роторе двигателя. PC формирует задание для внутреннего контура регулирования электромагнитного момента, замкнутого через регулятор момента (РМ). На вход РМ подается сигнал рассогласования, формируемый при сравнении сигнала задания от PC и вычисленного значения момента на валу двигателя. Выходом РМ является задание по частоте модулируемого напряжения. Закон постоянства потокосцепления статора реализуется за счет формирования амплитуды модулируемого напряжения, с учетом сигнала РМ и сигналов регулятора потока (РП). РП замкнуты по вычисленному значению проекций вектора потокосцепления и формируют корректирующий сигнал, позволяющий поддерживать значение потокосцепление статора постоянным и равным заданному.
Недостатком рассматриваемого способа является то, что при реализация данного способа, снижается надежности и ограничивается область применения АЭП, что связано с необходимостью установки на валу электродвигателя датчика скорости, который служит для формирования сигнала обратной связи.
Известен способ частотного управления АЭП с автономным инвертором напряжения. (Емельянов А.П. Скалярное управление асинхронным короткозамкнутым двигателем по активной составляющей тока статора / А.П. Емельянов, Б.А. Чуркин // Вестник Южно-Уральского государственного университета. - 2014. - Т. 14. №3 - С. 85-90.), принятый за прототип. Способ управления характеризуется формированием амплитуды и частоты выходного напряжения автономного инвертора, питающего асинхронный двигатель, в соответствии с требуемой частотой вращения двигателя, задаваемой в системе управления. Система управления замкнута по скорости через регулятор скорости (PC). На вход PC подается сигнал рассогласования между заданной и действительной частотой вращения, формирующийся при сравнении сигнала задания и сигнала текущей скорости. Для получения сигнала соответствующего текущей частоте вращения используется датчик скорости, установленный на валу двигателя. PC формирует задание для внутреннего контура регулирования, замкнутого через активной составляющей тока статора (РТ). На вход РТ подается сигнал рассогласования, формируемый при сравнении сигнала задания от PC и измеренного значения активной составляющей тока. Выходом РТ является задание по частоте и амплитуде модулируемого напряжения. Достоинством данного способа является стабилизация электромагнитного момента двигателя при регулировании частоты вращения, что достигается применением дополнительного контура регулирования активной составляющей тока статора, которая прямо пропорциональна величине электромагнитного момента асинхронного двигателя.
Недостатками данного способа являются низкая надежность и ограниченная область применения АЭП, что вызвано использованием в составе системы управления датчика скорости для формирования сигнала обратной связи.
Техническим результатом изобретения является повышение надежности и расширение области применения АЭП.
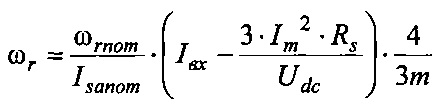
Технический результат достигается тем, что сигнал обратной связи пропорциональный частоте вращения двигателя, формируют в системе управления путем сложения сигналов синхронной частоты и частоты скольжения, взятого со знаком минус, для формирования которого в систему управления дополнительно вводят вычислительный блок, на вход которого подают сигналы, пропорциональные среднему значению тока на входе инвертора, максимальному значению тока на входе инвертора и коэффициенту модуляции, при этом сигнал, соответствующий текущей частоте скольжения определяют из выражения  ,
,
где Isanom - значение активной составляющей тока статора в номинальном режиме работы,
ωrnom - частота скольжения в номинальном режиме работы,
Iвх – сигнал, пропорциональный среднему значению тока на входе инвертора,
Im – сигнал, пропорциональный максимальному току инвертора,
Rs - активное сопротивление фазы обмотки статора АД,
Udc - среднее значение напряжения конденсатора в промежуточном звене преобразователя частоты,
m - коэффициент модуляции.
Способ частотного управления асинхронным электроприводом поясняется следующей фигурой:
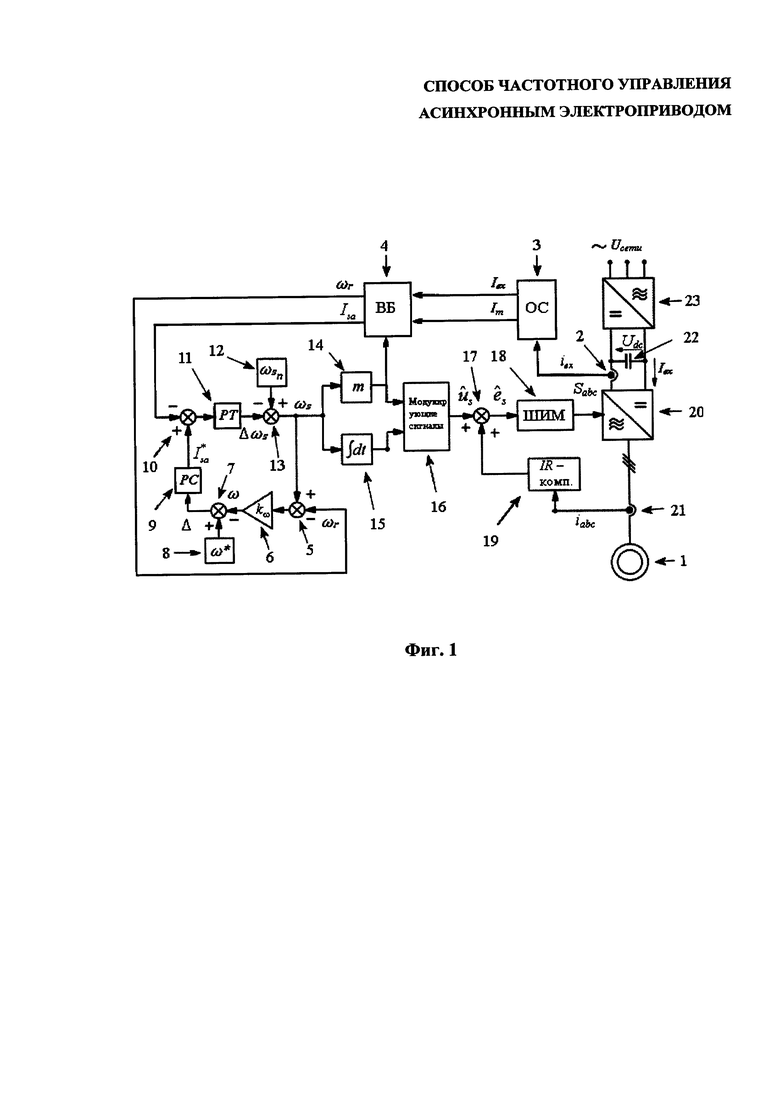
фиг. 1 - схема структуры системы управления
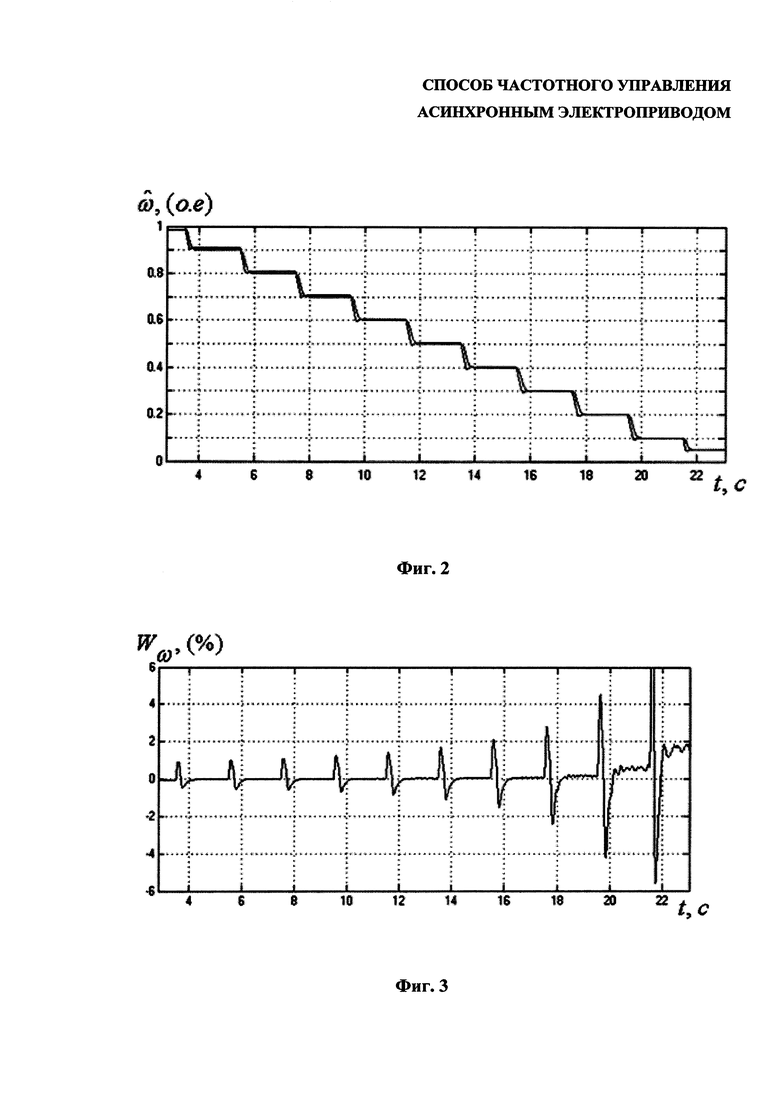
фиг. 2 - график изменение частоты вращения ротора асинхронного электродвигателя при изменении задания
фиг. 3 - график относительная ошибка определения частоты вращения ротора АД при регулировании
1 - асинхронный двигатель с короткозамкнутым ротором.
2 - датчик входного тока автономного инвертора напряжений;
3 - блок обработки сигнала;
4 - блок вычисления активной составляющей тока статора и частоты скольжения;
5 - блок сложения сигналов частоты скольжения и частоты модуляции;
6 - блок вычисления частоты вращения ротора;
7 - блок сложения сигналов текущей и заданной частоты вращения;
8 - блок задания частоты вращения;
9 - пропорционально-интегральный регулятор скорости вращения;
10 - блок сложения сигналов текущей и заданной активной составляющей тока статора;
11 - пропорционально - интегральный регулятор тока;
12 - блок задания номинальной частоты напряжения статора;
13 - блок сложения сигналов требуемого отклонения и заданной частоты модуляции;
14 - блок вычисления коэффициента модуляции;
15 - блок вычисления угла обобщенного вектора напряжения;
16 - блок формирования опорных сигналов широтно-импульсной модуляции;
17 - блок сложения сигналов модулирующих напряжении и сигналов компенсации падения напряжения на активном сопротивлении статора;
18 - блок формирования сигналов управления автономным инвертором напряжения;
19 - блок вычисления нормированного значения падения напряжения на активном сопротивлении статора;
20 - автономный инвертор напряжения;
21 - датчики тока фаз статора;
22 - емкостной фильтр;
23 - трехфазный выпрямитель напряжения.
Способ частотного управления электроприводом, реализуется системой управления и осуществляется следующим образом. Для управления асинхронным двигателем 1 используют преобразователь частоты, который состоит из выпрямителя напряжения 23, емкостного фильтра 22 и автономный инвертор напряжения 20, на выходе которого формируют напряжение, амплитуда и частота которого соответствуют требуемой частоте вращения электродвигателя. Требуемое напряжения формируют при помощи системы управления, которая осуществляет управление силовыми ключами инвертора в зависимости от заданной частоты вращения. Для регулирования частоты вращения в широком диапазоне значений и обеспечения необходимой точности регулирования в системе управления используют контур регулирования, содержащий пропорционально-интегральный регулятор скорости 9 и блок сложения сигналов текущей и заданной частоты вращения 7. Контур регулирования скорости замкнут по сигналу обратной связи. В качестве сигнала обратной связи используют сигнал пропорциональный текущей частоте вращения вала электродвигателя. Для формирования сигнала обратной связи используют сигнал пропорциональный входному току инвертора (iвх), который получают при помощи датчика входного тока автономного инвертора напряжений 2. Вычисляют среднее (Iвх) и максимальное (Im) значение входного тока, для чего в систему управления вводят блок обработки сигнала 3. Затем вычисляют текущее значение активной составляющей тока статора, в соответствии с выражением:  , где Rs - активное сопротивление фазы обмотки статора АД, Udc - среднее значение напряжения блок вычисления угла обобщенного вектора напряжения 15 в номинальном режиме, m - коэффициент модуляции. По полученному значению Isa определяют текущую частоту скольжения ωr как
, где Rs - активное сопротивление фазы обмотки статора АД, Udc - среднее значение напряжения блок вычисления угла обобщенного вектора напряжения 15 в номинальном режиме, m - коэффициент модуляции. По полученному значению Isa определяют текущую частоту скольжения ωr как  , где kа - коэффициент пропорциональности.
, где kа - коэффициент пропорциональности.
Коэффициент пропорциональности рассчитывают как  , где Isanom - значение активной составляющей тока статора в номинальном режиме работы, ωrnom - частота скольжения в номинальном режиме работы. Для вычисления Isa и ωr используют блок вычисления активной составляющей тока статора и частоты скольжения 4, на вход которого подают сигналы (Iвх, Im). Выходной сигнал блока вычисления активной составляющей тока статора и частоты скольжения 4, который соответствует текущей частоте скольжения, подают на отрицательный вход блока, сложения сигналов частоты скольжения и частоты модуляции 5, суммируют с сигналом соответствующим синхронной частоте поля статора и вычисляют текущую частоту вращения ротора электродвигателя при помощи блока вычисления частоты вращения ротора 6 в соответствии с выражением: ω=(ωs-ωr)⋅kω, где
, где Isanom - значение активной составляющей тока статора в номинальном режиме работы, ωrnom - частота скольжения в номинальном режиме работы. Для вычисления Isa и ωr используют блок вычисления активной составляющей тока статора и частоты скольжения 4, на вход которого подают сигналы (Iвх, Im). Выходной сигнал блока вычисления активной составляющей тока статора и частоты скольжения 4, который соответствует текущей частоте скольжения, подают на отрицательный вход блока, сложения сигналов частоты скольжения и частоты модуляции 5, суммируют с сигналом соответствующим синхронной частоте поля статора и вычисляют текущую частоту вращения ротора электродвигателя при помощи блока вычисления частоты вращения ротора 6 в соответствии с выражением: ω=(ωs-ωr)⋅kω, где  - коэффициент; Zp - число пар полюсов электродвигателя. Затем получают сигнал рассогласования Δω, сравнивая сигнал текущей частоты вращения с заданным в блоке задания частоты вращения 8 значением ω*, используя для этого блок сложения сигналов текущей и заданной частоты вращения 7. Сигнал рассогласования подают на вход пропорционально - интегрального регулятора скорости вращения 9, на выходе которого получают сигнал задания по активной составляющей тока статора
- коэффициент; Zp - число пар полюсов электродвигателя. Затем получают сигнал рассогласования Δω, сравнивая сигнал текущей частоты вращения с заданным в блоке задания частоты вращения 8 значением ω*, используя для этого блок сложения сигналов текущей и заданной частоты вращения 7. Сигнал рассогласования подают на вход пропорционально - интегрального регулятора скорости вращения 9, на выходе которого получают сигнал задания по активной составляющей тока статора  , который складывают помощи блока сложения сигналов текущей и заданной активной составляющей тока статора 10 с выходным сигналом Isa блока вычисления активной составляющей тока статора и частоты скольжения 4, пропорциональным текущему значению этой величины. Полученный сигнал рассогласования подают на вход пропорционально-интегрального регулятора тока 11. На выходе пропорционально-интегрального регулятора тока 11 получают сигнал ±Δωs, который соответствует требуемому отклонению частоты напряжения от номинального значения. Требуемое для заданной частоты вращения значение частоты модуляции напряжения формируют путем сложения сигнала отклонения и заданного в блоке задания номинальной частоты напряжения статора 12 номинального значения в виде
, который складывают помощи блока сложения сигналов текущей и заданной активной составляющей тока статора 10 с выходным сигналом Isa блока вычисления активной составляющей тока статора и частоты скольжения 4, пропорциональным текущему значению этой величины. Полученный сигнал рассогласования подают на вход пропорционально-интегрального регулятора тока 11. На выходе пропорционально-интегрального регулятора тока 11 получают сигнал ±Δωs, который соответствует требуемому отклонению частоты напряжения от номинального значения. Требуемое для заданной частоты вращения значение частоты модуляции напряжения формируют путем сложения сигнала отклонения и заданного в блоке задания номинальной частоты напряжения статора 12 номинального значения в виде  , для чего используют блок сложения сигналов требуемого отклонения и заданной частоты модуляции 13. Сигнал пропорциональный частоте ωs используют для формирования угла θ (блок вычисления угла обобщенного вектора напряжения 15) и коэффициента модуляции m (блок вычисления коэффициента модуляции 14). Угол θ получают путем интегрирования входного сигнала θ(t)=∫ωS(t)dt. Коэффициент модуляции определяют как отношение частот
, для чего используют блок сложения сигналов требуемого отклонения и заданной частоты модуляции 13. Сигнал пропорциональный частоте ωs используют для формирования угла θ (блок вычисления угла обобщенного вектора напряжения 15) и коэффициента модуляции m (блок вычисления коэффициента модуляции 14). Угол θ получают путем интегрирования входного сигнала θ(t)=∫ωS(t)dt. Коэффициент модуляции определяют как отношение частот  . Выходные сигналы блоков вычисления коэффициента модуляции 14 и вычисления угла обобщенного вектора напряжения 15 подают на вход блока формирования опорных сигналов широтно-импульсной модуляции 16 и получают сигналы, которые соответствуют фазному напряжению двигателя
. Выходные сигналы блоков вычисления коэффициента модуляции 14 и вычисления угла обобщенного вектора напряжения 15 подают на вход блока формирования опорных сигналов широтно-импульсной модуляции 16 и получают сигналы, которые соответствуют фазному напряжению двигателя  Затем складывают сигналы (uа, ub, uc), при помощи блока сложения сигналов модулирующих напряжении и сигналов компенсации падения напряжения на активном сопротивлении статора 17, с сигналами пропорциональными падению напряжения на активном сопротивлении статора, которые формируют на выходе блока вычисления нормированного значения падения напряжения на активном сопротивлении статора 19, подавая на вход этого блока сигналы датчиков тока фаз статора 21. Полученные сигналы (eа, еb, еc) в виде опорного напряжения подают на блок формирования сигналов управления автономным инвертором напряжения 18 и формируют сигналы управления ключами инвертора (Sa, Sb, Sc), для чего используют широтно-импульсную модуляцию. Подавая управляющие сигналы на ключи автономного инвертора напряжения 20, формируют фазное напряжение электродвигателя, которое соответствует заданной частоте вращения.
Затем складывают сигналы (uа, ub, uc), при помощи блока сложения сигналов модулирующих напряжении и сигналов компенсации падения напряжения на активном сопротивлении статора 17, с сигналами пропорциональными падению напряжения на активном сопротивлении статора, которые формируют на выходе блока вычисления нормированного значения падения напряжения на активном сопротивлении статора 19, подавая на вход этого блока сигналы датчиков тока фаз статора 21. Полученные сигналы (eа, еb, еc) в виде опорного напряжения подают на блок формирования сигналов управления автономным инвертором напряжения 18 и формируют сигналы управления ключами инвертора (Sa, Sb, Sc), для чего используют широтно-импульсную модуляцию. Подавая управляющие сигналы на ключи автономного инвертора напряжения 20, формируют фазное напряжение электродвигателя, которое соответствует заданной частоте вращения.
Способ управления позволяет повысить надежность и увеличить область применения асинхронного электропривода, что достигается за счет системы управления, в которую введены блок вычисления частоты скольжения и сумматор, позволяющие вычислять частоту вращения ротора и осуществлять ее регулирование без датчика скорости. Для реализации способа не требуется знания точных параметров электродвигателя, что существенно упрощает настройку системы управления. Областью применения данного способа являются системы управления электроприводами вентиляторов проветривания шахт и аппаратов воздушного охлаждения.
Способ поясняется следующими примерами. Проверка работоспособности способа частотного управления электроприводом производилась в среде визуального моделирования Matlab/Simulink. При моделировании использовались параметры электродвигателя 4А200М2УЗ, момент сопротивления механизма задавался в виде зависимости:

где ω - частота вращения двигателя (рад/с); Pмех - механическая мощность нагрузки (Вт); ωном - номинальная частота вращения электродвигателя (рад/с.)
При моделировании были приняты следующие значения Рмех=25 кВт, ωном=314 рад/с. Приведенный момент инерции электропривода составил Jпр=0.8 кг⋅м.
В процессе моделирования в системе управления задавалось ступенчатое изменение скорости вращения электродвигателя с шагом 0,1⋅ωном, при этом фиксировалась относительная ошибка определения скорости вращения:

где ωвыч - частота вращения вала электродвигателя вычисляемая в системе управления (рад/с); ωизм - измеренная частота вращения вала электродвигателя (рад/с.)
Для получения значения ωизм использовался стандартный наблюдатель координат электропривода из библиотеки Matlab/Simulink.
Результаты моделирования представлены на фиг. 2 и 3
Из результатов моделирования следует, что способ частотного управления электроприводом, который реализуется в системе управления, основанный на изменении частоты и амплитуды модулируемого автономным инвертором напряжения, для задания которого используется сигнал обратной связи по частоте вращения, вычисляемой в системе управления по сигналу, пропорциональному значению активной составляющей тока статора, позволяет регулировать частоту вращения электропривода и поддерживать ее на заданном уровне (фиг. 2). При этом ошибка определения частоты вращения по линеаризованной зависимости частоты скольжения от активной составляющей тока статора не превышает 1% в диапазоне регулирования скорости (1:10) (фиг. 3).
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| СПОСОБ ОПТИМАЛЬНОГО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402865C1 |
| Способ управления током асинхронного двигателя при питании от автономного инвертора напряжения | 2018 |
|
RU2679831C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
| СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2008 |
|
RU2390091C1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ТЯГОВЫМ ДВИГАТЕЛЕМ | 2010 |
|
RU2451389C1 |
| Частотно-регулируемый реверсивный электропривод | 1984 |
|
SU1170576A1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ МОМЕНТОМ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2459345C2 |
Изобретение относится к области электротехники и может быть использовано в системах управления асинхронных электроприводов (АЭП), в которых прямое измерение скорости вращения ротора двигателя, ввиду особенностей объекта регулирования, невозможно. Техническим результатом является повышение надежности и расширение области применения. Способ частотного управления асинхронным электроприводом, содержащий выпрямитель напряжения, емкостной фильтр и автономный инвертор напряжения, амплитуда и частота выходного напряжения которого формируются в соответствии с заданной частотой вращения двигателя, что реализуется в системе управления, замкнутой по частоте вращения через регулятор скорости, входным сигналом которого является рассогласование сигналов задания и обратной связи, для получения которого используют датчик скорости, установленный на валу электродвигателя. Сигнал обратной связи, пропорциональный частоте вращения двигателя, формируют в системе управления путем сложения сигналов синхронной частоты и частоты скольжения, взятого со знаком минус, для формирования которого в систему управления дополнительно вводят вычислительный блок, на вход которого подают сигналы, пропорциональные среднему значению тока на входе инвертора, максимальному значению тока на входе инвертора и коэффициенту модуляции. Сигнал, соответствующий текущей частоте скольжения, определяют из выражения
где Isanom - значение активной составляющей тока статора в номинальном режиме работы,
ωrnom - частота скольжения в номинальном режиме работы,
Iвх – сигнал, пропорциональный среднему значению тока на входе инвертора,
Im – сигнал, пропорциональный максимальному току инвертора,
Rs - активное сопротивление фазы обмотки статора АД,
Udc - среднее значение напряжения конденсатора в промежуточном звене преобразователя частоты,
m - коэффициент модуляции. 3 ил.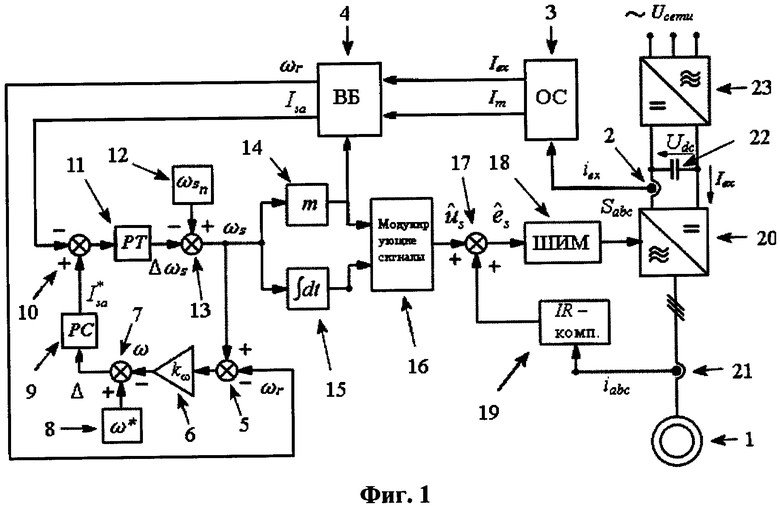
Способ частотного управления асинхронным электроприводом, содержащий выпрямитель напряжения, емкостной фильтр и автономный инвертор напряжения, амплитуда и частота выходного напряжения которого формируются в соответствии с заданной частотой вращения двигателя, что реализуется в системе управления, замкнутой по частоте вращения через регулятор скорости, входным сигналом которого является рассогласование сигналов задания и обратной связи, для получения которого используют датчик скорости, установленный на валу электродвигателя, отличающийся тем, что сигнал обратной связи, пропорциональный частоте вращения двигателя, формируют в системе управления путем сложения сигналов синхронной частоты и частоты скольжения, взятого со знаком минус, для формирования которого в систему управления дополнительно вводят вычислительный блок, на вход которого подают сигналы, пропорциональные среднему значению тока на входе инвертора, максимальному значению тока на входе инвертора и коэффициенту модуляции, при этом сигнал, соответствующий текущей частоте скольжения, определяют из выражения 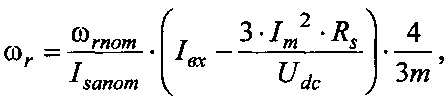
где Isanom - значение активной составляющей тока статора в номинальном режиме работы,
ωrnom - частота скольжения в номинальном режиме работы,
Iвх - сигнал, пропорциональный среднему значению тока на входе инвертора,
Im - сигнал, пропорциональный максимальному току инвертора,
Rs - активное сопротивление фазы обмотки статора АД,
Udc - среднее значение напряжения конденсатора в промежуточном звене преобразователя частоты,
m - коэффициент модуляции.
| СПОСОБ ОПТИМАЛЬНОГО ЧАСТОТНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402865C1 |
| СПОСОБ ОПТИМАЛЬНОГО ВЕКТОРНОГО УПРАВЛЕНИЯ АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2009 |
|
RU2402147C1 |
| СПОСОБ УПРАВЛЕНИЯ ЧАСТОТНО-РЕГУЛИРУЕМЫМ АСИНХРОННЫМ ДВИГАТЕЛЕМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 2008 |
|
RU2402866C2 |
| СПОСОБ ПЕРЕРАБОТКИ СТРУЖКИ ОСОБОЧИСТЫХ АЛЮМИНИЕВЫХ СПЛАВОВ | 2006 |
|
RU2323984C2 |
| DE 3752600 C2, 19.08.1982 | |||
| US 8183816 B2, 22.05.2013 | |||
| EP 0198372 A3, 20.01.1988 | |||
| WO 2011080792 A1, 07.07.2011. | |||

