(54) МЕХАНИЗМ ЗАЖИМА ПОДВИЖНОГО УЗЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| Клепальный пресс | 1980 |
|
SU1016031A1 |
| Шпиндельный узел | 1986 |
|
SU1743719A1 |
| КЛЕПАЛЬНАЯ СИЛОВАЯ ГОЛОВКА | 1973 |
|
SU367951A1 |
| Подъемник скользящей опалубки (его варианты) | 1982 |
|
SU1106885A1 |
| Прижимное гидромеханическое устройство | 1985 |
|
SU1491641A1 |
| УСТРОЙСТВО ДЛЯ ЗАЖИМА СМЕННЫХ ОРГАНОВ МЕТАЛЛОРЕЖУЩИХ СТАНКОВ | 1991 |
|
RU2014178C1 |
| Устройство для резки труб | 1988 |
|
SU1590221A1 |
| Токарный автомат | 1978 |
|
SU768570A1 |
| Многооперационный станок | 1983 |
|
SU1117181A1 |
| Зажимная головка правильно-растяжной машины | 1982 |
|
SU1094640A1 |
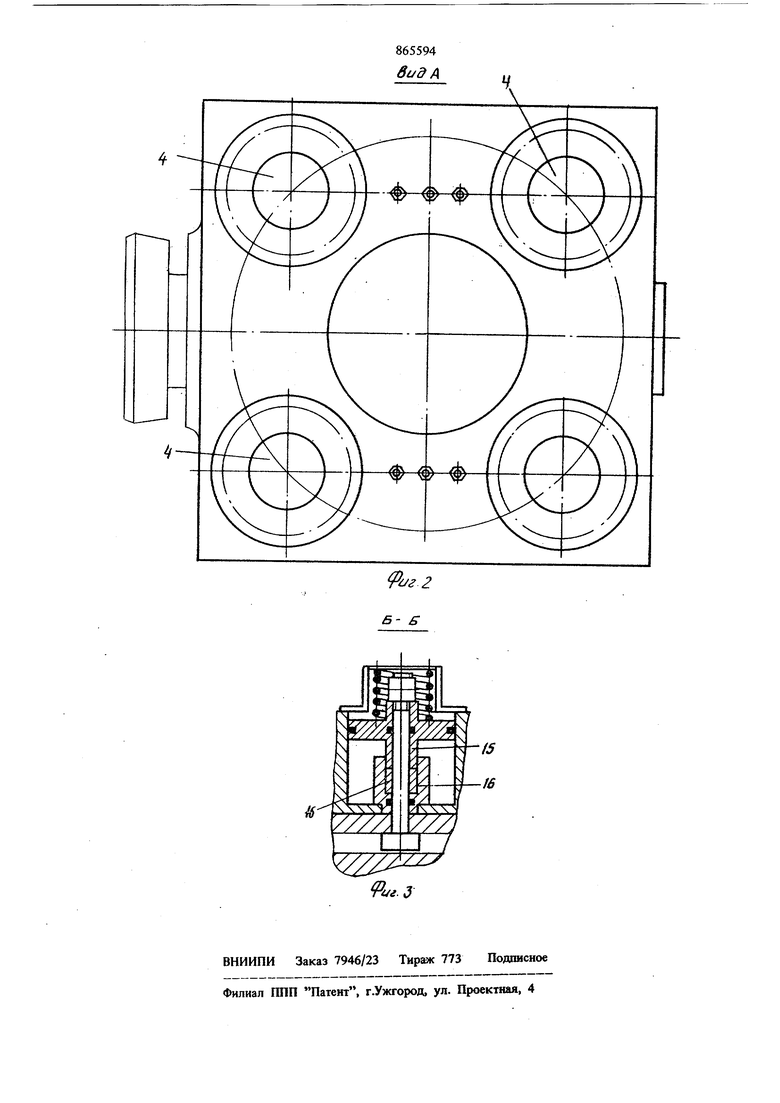
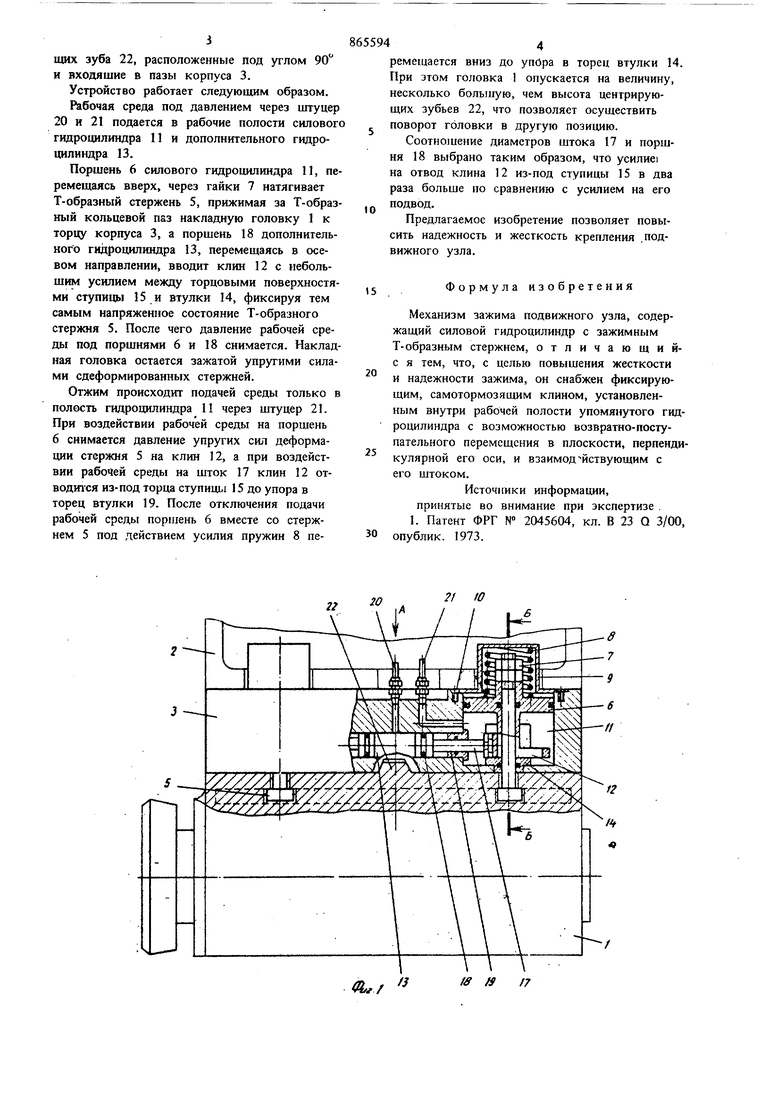
Изобретение относится к машиностроению, а именно к механизмам зажима подвижного узла металлорежущего станка. Известно устройство для зажима подвижного узла, содержащее гидроцилиндр с зажимным Т-об разным стержнем, воздействующим на подвижный узел 1. Недостатком устройства является ненадежность зажима головки из-за низкой жесткости упругих тарельчатых пружин. Цель изобретения - повышение жесткости и надежности зажима. Поставленная цель достигается тем, что механизм зажима снабжен фиксирующим, самотормозящим клином, установленным внутри рабочей полости гидроцилиндра с возможность возвратно-поступательного перемещения в плос кости, перпендикулярной его оси, и взаимодействующим с его щтоком. На фиг. 1 изображен механизм зажима, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1. Накладная поворотная головка 1 соединяет ся с ползуном 2 фрезерной бабки через промеж}точный корпус 3. Внутри корпуса 3 смонтированы четыре зажимных механизма 4. Каждый зажимной механизм 4 содержит Т-образный стержень 5, на котором неподвижно установлен порщень 6, упирающийся в гайки 7. Порщень 6 подпружинен пружиной 8, рас- положенной в стакане 9, закрепленном винта-, ми 10 на корпусе 3. В рабочей полости силового гидроцилиндра И расположен самотормозящий клин 12, перемещаемый от дополнительного гидроцилиндра 13. Самотормозящ1{й клш } 2 опирается на торец втулки 14 и своей наклонной поверхностью контактирует с торцом ступищ { 15 поршня 6. Кпин 12 в средней части имеет вырез, через который проходит стержень 5. Во втулке 14 предусмотрен паз 16,в котором размещен клин 12 и сг/пида 15 лоригая 6. Клин 12 соединен со щтоком 17,выполненным за одно целое с порщнем 18 и перемещающимся во втулке 19. Рабочая среда к гидроцилнвдрам 11 и 13 подается через unytifp 20 и 21. На накладной головке 1 выполнень четыре центрирующих зуба 22, расположенные под углом 90 и входяшие в пазы корпуса 3.
Устройство работает следующим образом.
Рабочая среда под давлением через штуцер 20 и 21 подается в рабочие полости силового гидроцилиндра 11 и дополнительного гидроцилиндра 13.
Поршень 6 силового гидроцилиндра 11, перемещаясь вверх, через гайки 7 натягивает Т-образный стержень 5, прижимая за Т-образный кольцевой паз накладную головку 1 к торцу корпуса 3, а поршень 18 дополнительного гидроцилиндра 13, перемещаясь в осевом направлении, вводит клин 12 с небольшим усилием между торцовыми поверхностями ступицы 15 и втулки 14, фиксируя тем самым напряженное состояние Т-образного стержня 5. После чего давление рабочей среды под поршнями 6 и 18 снимается. Накладная головка остается зажатой упругими силами сдеформированных стержней.
Отжим происходит подачей среды только в полость гидроцилиндра 11 через штуцер 21. При воздействии рабочей среды на поршень 6 снимается давление упругих сил деформации стержня 5 на клин 12, а при воздействии рабочей среды на шток 17 клин 12 отводтся из-под торца ступицы 15 до упора в торец втулки 19. После отключения подачи рабочей среды поршень 6 вместе со стержнем 5 под действием усилия пружин 8 пе655944
ремещается вниз до упОра в торец втулки 14. При этом головка 1 опускается на величину, несколько большую, чем высота центрирующих зубьев 22, что позволяет осуществить J поворот головки в другую позицию.
Соотношение диаметров штока 17 и поршня 18 выбрано таким образом, что усилие: на отвод клина 12 из-под ступицы 15 в два раза больше по сравнению с усилием на его подвод.
Предлагаемое изобретение позволяет повысить надежность и жесткость крепления .подвижного узла.
Формула изобретения
Механизм зажима подвижного узла, содержащий силовой гидроцилиндр с зажимным Т-образным стержнем, отличающийс я тем, что, с целью повышения жесткости и надежности зажима, он снабжен фиксирующим, самотормозящим клином, установленным внутри рабочей полости упомянутого гидроцилиндра с возможностью возвратно-поступательного перемещения в плоскости, перпендикулярной его оси, и взаимодействующим с его штоком.
Источники информации, принятые во внимание при экспертизе .
