(54) СПОСОБ ИЗМЕРЕНИЯ МАССЫ ТЕЛА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЬиЕСТВЛЕНИЯ

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СРЕДНЕЙ ЖИВОЙ МАССЫ БРОЙЛЕРОВ ПО СТАДУ ПРИ ИХ НАПОЛЬНОМ СОДЕРЖАНИИ | 2012 |
|
RU2515382C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕНЕНИЯ ПЛОТНОСТИ ЖИДКИХ СРЕД | 1993 |
|
RU2084864C1 |
| ГИДРОКОМПЕНСАЦИОННЫЕ ВЕСЫ (ВАРИАНТЫ) | 2001 |
|
RU2199092C2 |
| СПОСОБ СОЗДАНИЯ КОНТРОЛИРУЕМОЙ СИЛЫ ПРИ ПРОВЕРКЕ ВЕСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2530786C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЖИДКОСТИ | 1996 |
|
RU2095785C1 |
| Конвейерные весы | 1978 |
|
SU798498A1 |
| Устройство для взвешивания слитков | 1990 |
|
SU1760364A1 |
| Способ поосного взвешивания движущихся объектов | 1983 |
|
SU1137329A1 |
| УСТРОЙСТВО ДЛЯ ВЗВЕШИВАНИЯ ПРОКАТА | 2004 |
|
RU2277231C2 |
| УНИВЕРСАЛЬНЫЕ СЧЕТНЫЕ ВЕСЫ | 1992 |
|
RU2065580C1 |
I
Изобретение относится к конструкции весоизмерительных устройств и может быть использовано на предприятиях черной металлургии и тяжелого машиностроения для взвешивания движущихся предметов при наличии динамических возмущений в процессе взвешивания.
Известно устройство, содержащее сосуд с рабочей жидкостью, помещенную
Ь жидкость поплавковую камеру, перемещающуюся по направляющим, установленHbivit в сосуде, грузоприемную платформу, указатель веса, причем направляющие поплавковой камеры выполнены в виде струн fl.
Однако известное устройство обладает низкой точностью измер ения.
Известно устройство, содержащее сосуд с жидкостью, в котором свободно плавает чувствительный элемент. В известном устройстве увеличение веса чувствительного элемента приводит к его погружению в жидкость, величина
которого пропорциональна измеряемой массе .
Однако известное устройство и способ, реализованный в этом устройстве, не обеспечивают достаточную точность измерения массы.
Наиболее близким по технической сущности к известному способу и устройству для его осуществления является устройство, содержащее поплавок, распо10ложенный в резервуаре, заполненном ЖИДКОСТЬЮ, и соединенный с грузоприе м- ной платформой, и элемент индицирования массы. Способ реализован в известном устройстве путем приложения его
15 веса к погруженному в жидкость поплавку, связанному с элементом индииирова- иия массы Гз1.
Однако известное устрюйство не
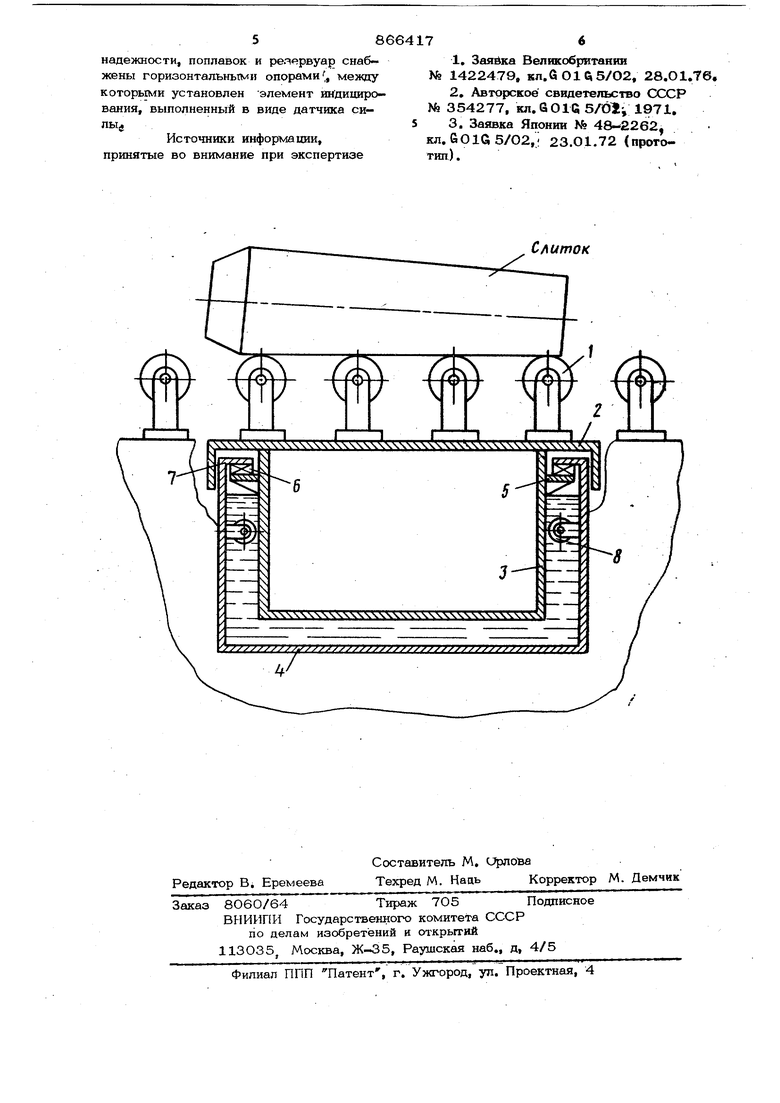
20 печивает достаточную работоспособность и точность измерения из-за значительных динамических возмущений, возникших при движении предметов. Цепь изобретения - снижение динамической погрешности, повышение точности измерения и эксплуатационной надежности. Постввленная цель достигается тем, что поплавсж и элемент индицирования массы нагружают выталкивающей силой, превышающий наибольший возможный вес измеряемой массы, а исгинную величину этой массы опрецелвюг по степени разгружения элемента иноицирования массы; по- пяавок и резервуар снабжены го-ризонтальными опорами, меладу которыми устансязлен элемент индицирования, выполненный в вице датчика сипы. На чертеже схематически изображено устройство, реализующее способ определения массы тела. Устройство состоит из секции рол1 Ганга 1, расположенной на грузопряемной платформе 2, соединенной с поплавком 3. Последний помешен в резерву « ар 4 с жидкостью. На поплавке 3 в горизонтальной плоскости вьшолнены опор 5, на которых установлены силоизмерительные датчики 6, контактируюише с п раллельно расположенными опорами 7 р зерву ара 4, Центрирование поплавка 3 в вертикальной плоскости осуществляется закрепленными на внутренних боковых поверхностях резервуара 4 роликами 8 . Работа устройства и способ определе ния массы тела осуществляются следующим образом. В ненагруженном состоянии на noitлавок 3 действует выталкивающая сила жидкости, которая через опоры 5 и воздействует и на силоизмерительные датчики 6, Система находится в шедва рительно напряженном состоянии, а датчики 6 выдают сигнал, соответствующий началу отсчета. При поступлении слитка на платформу 2 его вес, направленный навстречу выталкивающей силе, уменьшает усилие, приложенное к датчикам 6, и они вьщают сигнал, пропорциональный измеряемому весу. При этом выталкивающая сила, воздействуюицая на весовую платформу снизу, превьппает наибольший вес слитка и платформы на 5-1О %, Усилие, приложенное к платформе, передается силоизмерительному элементу, например тензодатчику, электросигнал которого регистрируют для определения массы слитка. При нахождении слитка на весовой платформе на нее воздействует усилие, создаваемое весом слитка и направленное встречно выталкивающей силе, поэтому силоизмерительный элемент воспринимает уменьшение приложенной к нему силы, и тензодатчик выдает сигнал, пропорциональный разности двух усилий, воздействующих на весовую платформу. По величине этой разности опрецеля- . ют массу слитка. Устройство позволяет повысить точность и чувствительность измерения по- . чти в 2 раза, так как предел измерения силоизмерительных датчиков, а следовательно, и абсолютная погрешность измерения npHNiepHO в 2 раза меньше по сравнению с датчиками, нагруилемыми суммарным весом измеряемого предмета и весоприемныг. устройством в ве сах, применяемых на блюмингах, а способ определения массы тела позволяет повысить точность и чувствительность измерения массы, движущихся тел по сравне- .нию с измерением на рычажных весах примерно в 1,5 раза за счет уменьщения динамической погрешности. Ожидаемый экономический t эффект от применения способа и устройства на заводе Кривороже таль при оп - ределении массы слитков на рольганге составит 200 тыс. руб, в год. Формула изобретения 1. Способ измерения массы тела путем приложения его веса к погруженному в жидкость поплавку, связанному с элементом индицирования массы, о тличающийся тем, что, с целью . -снижения динамической погрешности, поплавок и элемент индицирования массы нагружают выталкивающей силой, превьоиающей наибольший возможный вес измеряемой массы, а истинную величину этой массы определяют по степени разгружения элемента индицирования массы. , 2, Устройство для осуществления епособа по п, 1, содержащее поплавок, соединенный с грузоприемной платфор мой, и расположенный в резервуаре, заполненном жидкостью и элемент индицирования массы, отличающе-. е с я тем, что, с целью повышения точности измерения и эксплуаташюкной
надежности, поплавок и резервуар снаб жены горизонтапъньтми опорами|, между которьши установлен элемент индицирования, выполненный в виде датчика сиПЫл
Источники информации, принятые во внимание при экспертизе
№ 1422479, кл.бО155/О2, 28.01.76,
Слиток
