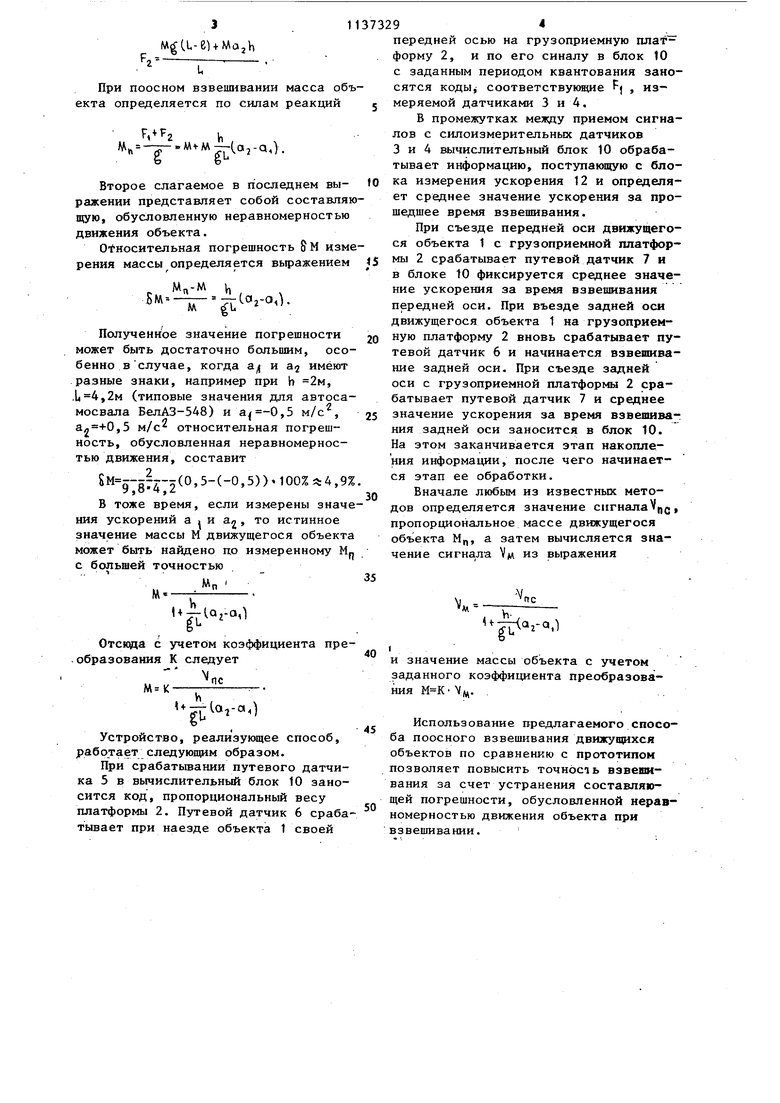
Изобретение относится к области весоизмерительной техники и предназначено для использования в устройствах измерения масс наземных движущих ся транспортных средств, например автомобилей. Известны способы поосного взвешивания движущихся объектов, предусмат ривающие формирование информационноYO сихнала силоизмерительных датчиков и последующую обработку его с целью подавления динамической помехи, содержащейся в информационном сигнале 1 Наиболее близким по технической сущности к данному является способ поосного взвешивания движущихся объектов, заключающийся в получении сиг нала от силоизмерительных датчиков, выделении из этого сигнала динамической помехи и вычислении значения :массы объекта по полученной постоянной составляющей сигнала 2 . Однако при поосном взвешивании движущихся объектов выходной сигнал силоиэмерительных датчиков содержит три составляющие: постоянную V , про порциональную массе движущихся объек тов; постоянную Vq, обусловленную не равномерностью движения объекта по грузоприемной платформе; переменную составляющую д (динамическую помеху ;вызванную колебаниями системы движущийся объект - платформа. Согласно способу предусматривается подавление динамичесой помехи с целью вьщеления некоторой постоянной составляющей сигнала Vj, . При этом не учитывается что в состав п входят две составляющие м и Vg . в тоже время величина погрешности, вносимой составляю щей Vg , которой обычно пренебрегают, может достигать в ряде случаев 5...10%. Особенно возрастает величина составляющей Vg , а следовательно и обусловленная этой составляющей погрешность взвешивания, если при движении передней оси автомобиля ; по платформе водитель резко притормо зит, а затем при взвешивании задней оси, наоборот, резко увеличит скорость движения. Поэтому известный способ не может обеспечить высокую точность взвешивания. Цель изобретения - повышение точности за счет учета помехи, обусловленной неравномерностью движения объ екта. Поставленная цель достигается тем, что согласно способу поосного взвешивания движущихся объектов, заключающемуся в получении сигнала от силоизмерительных датчиков, вьщелении из этого сигнала динамической помехи и вычислении значения массы объекта по полученной постоянной составляющей сигнала, измеряют ускорение объекта в моменты взвешивания его осей, а значение массы объекта вычисляют по формуле ...V, заданный коэффициент преобразования; сумма постоянных составляющих, полученных npri взвешивании осей; высота центра масс взвешиваемого объекта; L- расстояние между осями объекта; - ускорение объекта соответственно при взвешивании передней и задней оси; - ускорение свободного. падения. На фиг. 1 показана схема для пояснения способа; на фиг. 2 - схема для реализации способа. Движущийся объект 1 своей передней осью находится на грузоприемной платформе 2, опирающейся на силоизмерительные датчики 3, 4. Устройство (см. фиг. 2) содержит также путевые датчики 5, 6 и 7, блоки 8 и 9 сопряжения с вычислительным блоком 10, например микропроцессорным, блок индикации 11 и блок 12 измерения ускорения. На фиг. 1 покагзаны также: - реакция платформы; у - реакция дороги; P g - вес объекта (автосамосвала) ,L расстояние между осями; В - расстоя-, ние от задней оси до центра тяжести масс; h - высота центра масс, Fj, сила инерции, равная - Ма, а - ускорение движения объекта. Выражения для реакций F и Pg ходятся из уравнений суммы моментов сил относительно точек А и В . ,Ь f 1 Г При поосном взвешивании масса об екта определяется по силам реакций h Ап (.а2-аЛ. Второе слагаемое в последнем выражении представляет собой составля щую, обусловленную неравномерностью движения объекта. 0 носительная погрешность &М изм рения массы определяется вьфажением , М„-М V, .. SM---; -COj-O,). Полученное значение погрешности может быть достаточно большим, осо бенно в случае, когда ац и aj имеют разные знаки, например при h 2м, ,,2м (типовые значения для автоса мосвала БелАЗ-548) и ,5 м/с , ,5 м/с относительная погрешность, обусловленная неравномерностью движения, составит SM g-g74-2 5-(-0.5))100% 4,9 В тоже время, если измерены знач ния ускорений а 1 и ая, то истинное значение массы М движущегося объект может быть найдено до измеренному М с большей точностью Мп ,l Отсюда с учетом коэффициента пре - образования К следует М, g|;ta,-a,) Устройство, реализующее способ, работает следующем образом. При срабатывании путевого датчика 5 в вычислительный блок 10 заносится код, пропорциональный весу платформы 2. Путевой датчик 6 сраба тывает при наезде объекта 1 своей передней осью на грузоприемную платформу 2, и по его синалу в блок 10 с заданным периодом квантования заносятся КОДЫ; соответствующие Р) , измеряемой датчиками 3 и 4, В промежутках между приемом сигналов с силоизмерительных датчиков 3 и 4 вычислительный блок 10 обрабатывает информацию, поступающую с блока измерения ускорения 12 и определяет среднее значение ускорения за прошедшее время взвешивания. При съезде передней оси движущегося объекта 1 с грузоприемной платформы 2 срабатывает путевой датчик 7 и в блоке to фиксируется среднее значение ускорения за время взвешивания передней оси. При въезде задней оси движущегося объекта 1 на грузоприемную платформу 2 вновь срабатывает путевой датчик 6 и начинается взвешивание задней оси. При съезде задней оси с грузоприемной платформы 2 срабатывает путевой датчик 7 и среднее значение ускорения за время взвешивания задней оси заносится в блок 10. На этом заканчивается этап накопления информации, после чего начинается этап ее обработки. Вначале любым из известных методов определяется значение cигнaлaV„Q, пропорциональное массе движущегося объекта М, а затем вычисляется значение сигнала VM из выражения .l и значение массы объекта с учетом заданного коэффициента преобразования лц. Использование предлагаемого способа поосного взвешивания движущихся объектов по сравнению с прототипом позволяет повысить точность взвешивания за счет устранения составляющей погрешности, обусловленной неравномерностью движения объекта при взвешивании.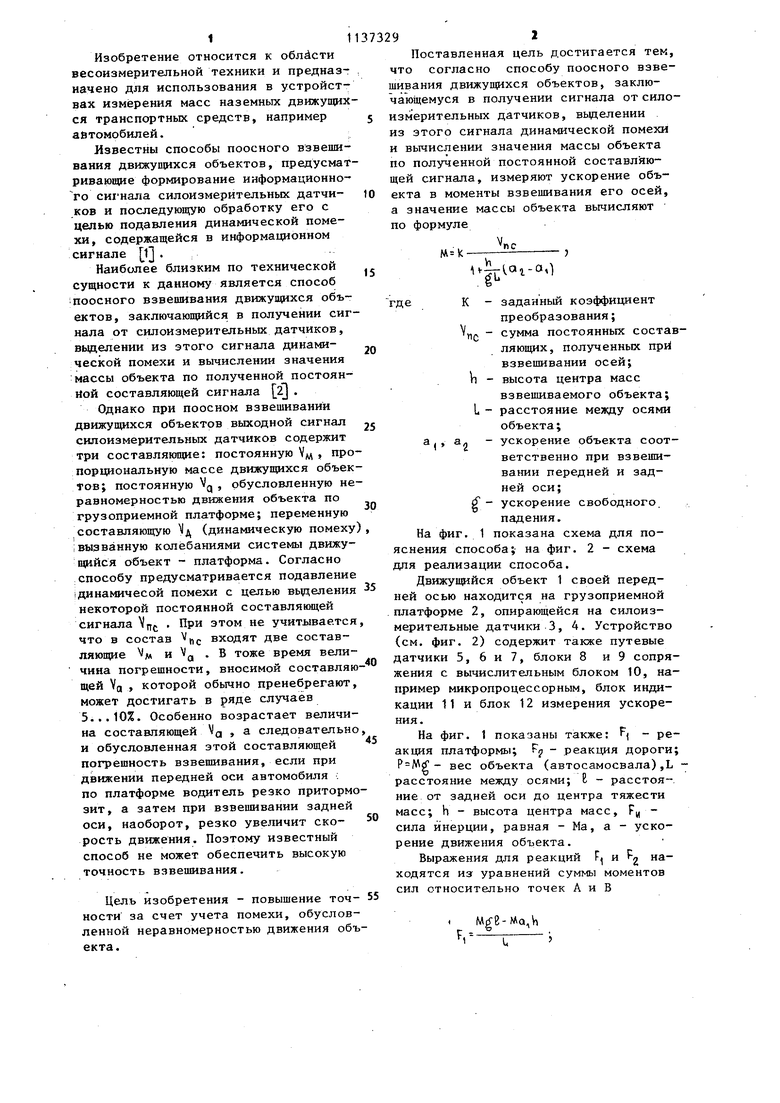
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для поосного взвешивания в движении железнодорожного подвижного состава | 1981 |
|
SU994926A1 |
| ВАГОННЫЕ ВЕСЫ | 2002 |
|
RU2239800C2 |
| Устройство для взвешивания движущихся объектов | 1987 |
|
SU1571408A1 |
| Устройство для взвешивания движущихся объектов | 1978 |
|
SU731304A1 |
| Устройство для взвешиваниядВижущиХСя Об'ЕКТОВ | 1978 |
|
SU794393A1 |
| Устройство для взвешивания автомобилей в движении | 1987 |
|
SU1571415A1 |
| Устройство для поосного взвешивания автомобилей в движении | 1991 |
|
SU1809323A1 |
| Железнодорожные весы для поосного измерения массы вагонов в движении | 1985 |
|
SU1276917A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СРЕДНЕЙ ЖИВОЙ МАССЫ БРОЙЛЕРОВ ПО СТАДУ ПРИ ИХ НАПОЛЬНОМ СОДЕРЖАНИИ | 2012 |
|
RU2515382C2 |
| Устройство для взвешивания движущихся железнодорожных составов | 1981 |
|
SU1041878A1 |
еВОСОБ ПООСНОГО ВЗВЕШИВАШЯ ДВИЖУдахея ОБЪЕКТОВ, заключающийся :В получении сигнала от силоизмерительных датчиков, вьщелении из зтого сигнала динамической помехи и вычислении значения массы объекта по полученной постоянной составляющей сигнала, отличающийся тем что, с целью повышения точности за счет учета помехи, обусловленной не-; равномерностью движения объекта, из меряют ускорения объекта в моменты взвешивания его осей, а значение массы объекта вычисляют по формуле Vr пс М-К - J ) К где заданный козффициент преобразования; Vсумма постоянных составляющих, полученшл : при взвешивании осей; h высота центра масс взвешиваемого объекта L расстояние между осями объекта; - ускорение объекта соС ответственно при взве- шиваьии передней и за ней оси;, - ускорение свободного падения. &Э М : f Ф
| t | |||
| Взвешивание транспортных средств в движении | |||
| Обзорная информация , ЦНИИТЭЙ приборостроения, М., 1978, с | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Весы автомобильные стационарittte автоматические для взвешивания в движении | |||
| Прибор для вычерчивания конических сечений | 1922 |
|
SU457A1 |
| ОДНОФАЗНЫЙ АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 0 |
|
SU253919A1 |
