(54) КОНВЕЙЕРНЬШ ВЕСЫ
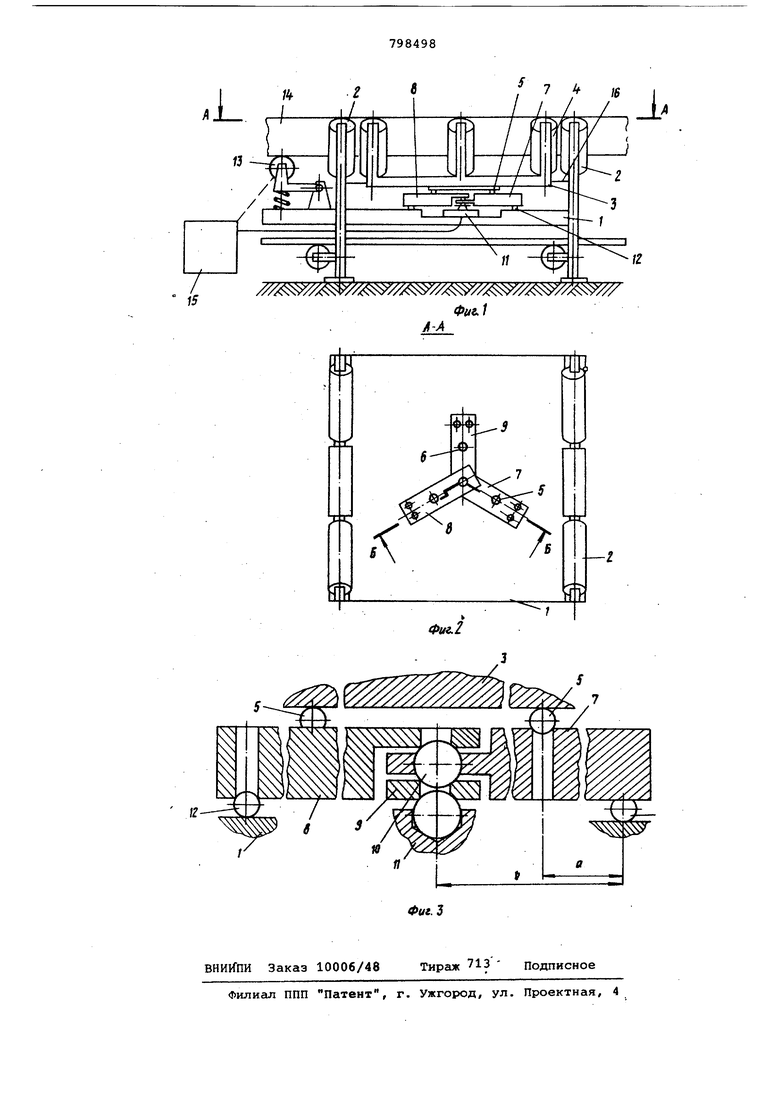
платформа 3, крайние роликоопоры 4 которой максимально приближены к ограничивающим роликоопорам pj .
Грузоприемная платформа 3 опирается на три шаровые опоры 5, установленные в отверстия 6, выполненные в рычагах 7-9. В одно из отверстий 6 рычага 7 установлена шаровая опора 10, через которую рычаги 7-9 передают усилие от грузоприемной платформы 3 к силоизмерительному датчику 11. Каждый из рычагов 7-9 опирается на неподвижную платформу 1 посредством двух шаровых опор 12, Силоизме Зительный датчик 11 и датчик 13 перемещения конвейерной ленты 14 подключены к блоку 15 обработки информации,
Грузоприемная платформа 3 удерживается с помощью струнок 16.Плечи айв рычагов 7-9 (фиг.З) выполнены одинаковыми.
Весы работают следующим образом. Масса груза М, произвольно расположенного на грузоприемной платформе 3, передается посредством шаровЫх опор 5 на рычаги 7-9 и далее через общую шаровую опору 10 на силойэмеритальный датчик 11.
Сигнал силоизмерительного датчика ll, а также сигнал датчика 13 перемещения конвейерной ленты 14, преобразуются в блоке 15 обработки информации в сигнал пропорционгшьный измеряемой нагрузке. Поскольку суммарное усилие, воспринимаемое всеми рычагами, равно массе груза М, а усилие, воспринимаемое каждым рычагом 7-9, обратно пропорционально расстоянию от точки опоры 12 рычага до линии действия центра тяжести груза и равто справедливо равенно ш 1, по 2 ство
+ m/j+ fn М;
Л1
I т m 2 I 3 Усилие от рычагов 7-9, уменьшенное в - раз J передается на силоизмерительный датчик 11, где происходит суммирование этих усилий.
Таким образом суммарное усилие, воспринимаемое датчиком 11, определяется как
р, т 2ч-т2| т | |{т,
или С1 - М . Ь
Т.е.величина усилия, действующего на силоизмерительный датчик 11,
не зависит от эксцентричности приложения нагрузки к грузоприемной платформе 3, а зависит только от точности изготовления плеч рычагов 7-9. Выполнение этих рычагов с одинаковой длиной плеч значительно облегчает их изготовление, а при совместной обработке комплекта рычагов к каждым весам, относительная погрешность изготовления плеч практически может быть сведена к нулю.
Выполнение в рычагах ряда отверстий 6 позволяет дискретно менять коэффициент редукции, т.е. расширить диапазон измерений.
При колебаниях температуры окружающей среды изменение объема рабочей жидкости в силоизмерительном датчике вызывает вертикальное перемещение грузоприемной платформы, но так как рычажная система не создает сопртивления этим перемещениям, то и дополнительных сил, действующих на силоизмерительный датчик 11 и зависящих от вертикальных перемещений, не возникает.
Формула изобретения
Конвейерные весы, содержащие неподвижную платформу с ограничивающими роликоопорами, между которыми расположена Грузоприемная платформа и силоизмерительный датчик, подключенный совместно с датчиком перемещения конвейерной ленты к блоку обработки информации, отличающ и е с я тем, что, с целью повышения точности, в них введены рычажная система, выполненная в вид трех идентичных рычагов, установленных под углом 12о друг к другу, и шаровые опоры, причем в рычагах выполнен ряд отверстий под шаровые опры, при этом одни концы рычагов соединены между собой и через общую шаровую опору связаны с силоизмерительным датчиком, другие концы рычагов посредством группы шаровых опор установлены на неподвижную опору, а середины рычагов через другую группу шаровых опор связаны с грузоприемной платформой.
Источники информации, принятые во внимание при экспертизе
1.Карпин Е.Б. Средства автоматизации для измерения и дозирования массы, М., Машиностроение, 1971, с. 206-214.
2.Авторское свидетельство СССР № 330349, кл. G 01 G 5/00, 1967 (прототип). 1 ; i-. Г-/r. г в Фаг.1 7 , 16
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвейерные весы | 1990 |
|
SU1735723A1 |
| Конвейерные весы | 1982 |
|
SU1242717A1 |
| КОНВЕЙЕРНЫЕ ВЕСЫ | 2002 |
|
RU2232979C2 |
| Конвейерные весы | 1976 |
|
SU714160A1 |
| Конвейерные весы конвейеров прямого и реверсивного хода | 2016 |
|
RU2625042C1 |
| УНИВЕРСАЛЬНЫЕ СЧЕТНЫЕ ВЕСЫ | 1992 |
|
RU2065580C1 |
| Конвейерные весы | 1987 |
|
SU1587343A1 |
| Конвейерные весы | 1982 |
|
SU1084620A1 |
| Конвейерные весы | 2018 |
|
RU2733977C2 |
| Автоматические конвейерные весы | 1987 |
|
SU1548670A1 |
iJ
Ни
i:
