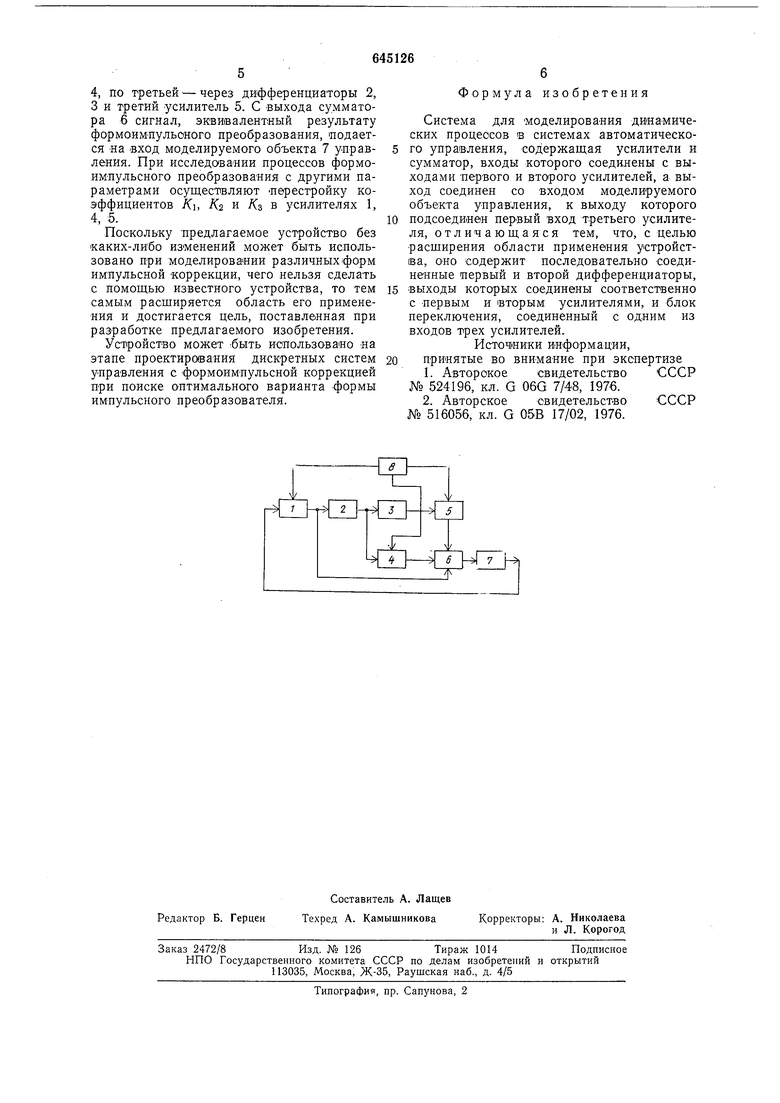
в ДСУ в широком диапазоне изменения параметров формоимпульсного преобразователя и без перестройки структуры этого устройства. Указанная цель достигается за счет того, что в известное устройство дополнительно введены последовательно соединенные первый и второй дифференциаторы, выходы которых соединены соответственно с первым и вторым усилителями, и блок переключения, соединенный с одним из входов трех усилителей. Это позволяет расширить область -применения -системы. В основу разработки системы положено использование приближенного эквивалентного Представления ДСУ с формоимПульсной коррекцией в виде непрерывной модели. Предложенное непрерывное представлеяие для систем с формоимпульоной коррекцией может быть получено, исходя из следующих соображений. Известно, что модель реального объекта управления, как непрерывного элемента системы автоматического управления, обладает свойствами фильтра низких частот. Если период дискретности То (интервал между двумя соседними моментами замыкания ключа) мал по сравнению с основ1ными постоянными времени Т модели объекта управления, т. е. ,(1) ТО ДСУ можно рассматривать приближенно как непрерывную, в которой ключ заменен безинерционным усилителем с коэффициентом 1/Го. Условие (1) обычно выполняется на практике -при моделировании динамических процессов в системах с инерционным объектом управления. В общем случае функция веса S(/) формоимпульоного корректора отлична от нуля лишь на конечном интервале времени 0 , а передаточная функция всегда трансцендентна. При многократной форме импульсов передаточная функция формоимпульсного корректора записывается в виде5 (Я) -i k - i; («г - е- - -а,е-т.р где Д Практическое использование приближенной непрерывной модели, включаюш,ей звено с передаточной функцией вида (2), связано с известными трудностями, обусловленными необходимостью включения в схему модели элементов запаздывания аналогового или дискретного типа и необходимостью изменения структуры устройства при изменении формы импульсов. Если в выражении (2) ехр()разложить в ряд Маклорена, и ограничиться первыми тремя членами ряда, тогда передаточную функцию разомкнутой системы автоматического управления с формоимпульсной коррекцией можно записать в виде2 (2-1)«г -ГоР + 2Л л 2 3(-1) где WOQ(P) -передаточная функция моделируемого объекта управления. В основу разработки структуры предлагаемого технического решения положено выражение вида -(3). Структурная схема устройства для моделирования динамических процессов в САУ с формоимпульсным преобразователем показана на чертеже. Устройство содержит первый усилитель 1 с коэффициентом К, h первый и второй дифференциаторы 2, 3; второй усилитель 4 с коэффициентом л 2(2i-l)a; Третий усилитель 5 с коэффициентом /С, (/-l)+l ajg/6ft 2a,; сумматор б; моделируемый объект 7 управления; блок 8 переключения. В системе с блока 8 переключения IB зависимости от требуемых значений /г и cci моделируемого процесса формоимпульсного преобразователя устанавливают соответстующие значения коэффициентов К., Кч и Кз в усилителях 1, 4, 5. При включении системы сигнал с выхода моделируемого объекта 7 управления усиливается и по трем цепям подается на входы сумматора 5: по одной цепи - непосредственно, по второй- через дифференциатор 2 и з силитель
4, по третьей -через дифференциаторы 2, 3 и третий усилитель 5. С выхода сумматора в сигнал, эквивалентный результату формоиМПульоного преобразования, подается «а вход моделируемого объекта 7 управления. При исследовании процессов формоиМПульсного преобразования с другими параметрами осуществляют перестройку коэффициентов /Сь Аг и /Сз в усилителях 1, 4, 5.
Поскольку Предлагаемое устройство без каких-либо изменений может быть использовано при моделировании различныхформ импульсной коррекции, чего нельзя сделать с помощью известного устройства, то тем самым расширяется область его применения и достигается цель, поставленная при разработке предлагаемого изобретения.
Устройство может быть использовано иа этапе проектирования дискретных систем управления с формоимпульсной коррекцией при поиске ОПтимального варианта формы импульсного преобразователя.
Формула изобретения
Система для моделирования динамических процессов В системах автоматического управления, содержащая усилители и сумматор, входы которого соединены с выходами первото и второго усилителей, а выход соединен со входом моделируемого объекта управления, к выходу которого
подсоединен первый вход третьего усилителя, отличающаяся тем, что, с целью расщирения области применения устройства, оно содержит последовательно соединенные первый и второй дифференциаторы,
выходы которых соединены соответственно с первым и вторым усилителями, и блок переключения, соединенный с одним из входов трех усилителей.
Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 524196, кл. G 06G 7/48, 1976.
2.Авторское свидетельство СССР № 516056, кл. G 05В 17/02, 1976.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для моделирования динамических процессов в системах автоматического управления | 1979 |
|
SU866566A1 |
| Система для моделирования динамических процессов в системах автоматического управления | 1985 |
|
SU1260980A1 |
| Устройство для аналогового моделирования динамических процессов в дискретных системах автоматического управления | 1987 |
|
SU1474695A1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2388010C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СИСТЕМА СВЯЗИ УПРАВЛЕНИЯ УДАЛЁННЫМИ ОБЪЕКТАМИ | 2015 |
|
RU2666105C1 |
| Нелинейная следящая система | 1989 |
|
SU1615672A1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Устройство для обучения и контроля совместной работы операторов | 1985 |
|
SU1345235A1 |
| ЦИФРОВАЯ СЛЕДЯЩАЯ СИСТЕМА | 1991 |
|
RU2018899C1 |
