(54) САМОНАСТРАИВАЮЩИЙСЯ РЕГУЛЯТОР

| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| Самонастраивающаяся система с приводом на муфтах | 1987 |
|
SU1444712A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1249478A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1138787A1 |
| Устройство для регулирования температуры | 1979 |
|
SU840837A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
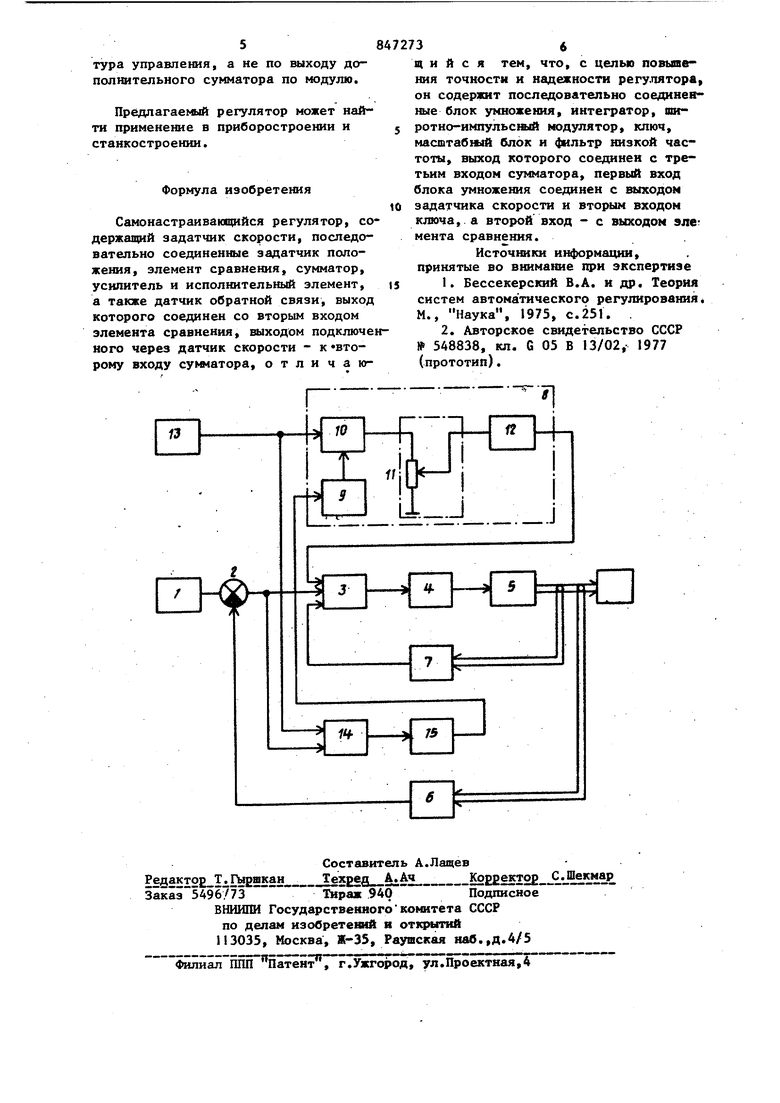
Изобретение относится к автоматическому управлению и может быть использовано в системах стабилизации антенн. Известен самонастраивающийся регу лятор, содержащий последовательно со единенные задатчик положения, элемен сравнения, сумматор, первый усилител первый исполнительный элемент, выход которого кинематически через датчик обратной связи соединен с другим вхо дом элемента сравнения и через датчик скорости и масштабный элемент св зан со вторым входом сумматора, третий вход которого соединен с задатчиком скорости П. Недостатком данного самонастраива ющегося регулятора является его невысокая точность.. Наиболее близким по технической сущности к предлагаемому является комбинированный самонастраивакицийся регулятор, содержащий задатчик скорости, последовательно соединенные .задатчик положения, элемент сравненйя, сумматор, усилитель и исполнительный элемент, а также датчик обратной связи, шлход которого соединен со вторым входом элемента сравнения, выходом подключениого к входу объекта управления и через датчик скорости - к второму входу сумматора 12. Однако известное устройство обладает ошибкой суммирования сигналов в основном контуре регулирования и контуре самонастройки, воз1в1какхцей вследствие неидентичности характеристик обоих сумматоров, а также временного и TefmepaTypHoro ухода их параметров. При достаточно большом расхождении, синибка в основном контуре регулирования достигает значительной величины и устройство работает по выходу другого сумматора. Кроме того, управление масштабным коэф(}и1ЦИентом цепи обратной связи по скорости нарушает условия устойчивости основного контура регулирования при уменьшении коэффициента передачи элемента вырабатывающего сигнал по входной скорости. Недостатком регулятора является также наличие громоздкого и ма лонадежного электромеханического привода перестройки масштабного элемента Цель изобретения - повышение точности и надежности регулирования. Поставленная цель достигается тем что самонастраивающийся регулятор содержит последовательно соединенные блок умножения, интегратор, широтноимпульсный модулятор, ключ, масштабный блок и фильтр низкой частоты, выход которого соединен с третьим входо сумматора, первый вход блока умножения соединен с выходом задатчика скорости и вторым входом ключа, а второ вход - с выходом элемента сравнения. На чертеже приведена функциональная схема регулятора. Самонастраивающийся регулятор содержит задатчик 1 положения, элемент 2 сравнения, сумматор 3, усилитель 4 исполнительный элемент 5, датчик 6 обратной связи, датчик 7 скорости, электронный масштабный элемент 8, со стоящий из широтно-импульсного модулятора 9, КЛЮЧ9 на МОП-транзисторе 10, масштабного блока (звена с посто явным коэффициентом передачи) И фильтра 12 низких частот, задатчик 13 скорости, блок 14 умножения (перемножитель) и интегратор 15, выполненный на операционном усилителе. Блок 14 умножения, интегратор 15 и электронный масштабный элемент 8 выполненные на линейных интегральных схемах, образуют контур самонастройки. При этом блок 14 умножения (перемножитель) и интегратор 13, соединенные последовательно выполняют операцию вычисления взаимной корреляции сигнала с задатчика 13 скорости и сигнала ошибки основного кон тура управления. При наличии в сигнале ошибки скоростной составляющей на выходе коррвпятора формируется напряжение, пропорциональное интегралу квадрата скоростной составлякяцей ошибки основного контура управления. Знак напряжения и его величина определяют направление и величину плавного и линейного изменения,коэффициента передачи электронного масштабного элемента 8. Помехи и возмущения в сигнале ошибки, некоррелированные с сиг налом задатчика 13 скорости не вызывает появления постоянной составляющей на выходе перемножителя 14и фильтруются интегратором 15, При этом, чем больше постоянная времени интегрирования, тем больше отношение отклика коррелятора на скоростную составлякндую сигнала ошибки к отклику на помеху и тем большая точность самонастройки может быть получена. В исходном состоянии (в момент включения системы) напряжение на выходе коррелятора равно нулю, коэффициент передачи электронного масштабного элемента 8 определяется начальной скважностью импульсов QS2 широтно-импульсного модулятора 9 и коэффициентом передачи звена. 1I, обеспечивающего начальную уставку компенсирукицего сигнала. Среднее значение сигнала входной скорости за период повторения импульсов ШИМ 9 с выхода ФНЧ 12 подается на вход сумматора 3. Полоса пропускания ФНЧ 12 галбирается гораздо большей полосы входных воздействий регулятора, а частота ШИМ 9 определяется необходимым подавлением модуляции сигнала на выходе ФНЧ 12, При уходе параметров основного контура управления и появлении скоростной составляющей оошбки отработки входных воздействий, напряжение с выхода интегратора 15 управляет скважностью выходных импульсов ШИМ 9 и, соответственно, коэффициентом передачи в цепи задатчика 13 скорости до тех пор, пока скоростная составляющая ошибки основного контура регулирования не уменьшается до уровня разреша мцей способности контура самонастройки, В качестве звена 11 с постоянным коэффициентом передачи используют переменный подстроечный резистор или делитель на постоянных резисторах. Таким образом, в предлагаемом регуляторе, в отличие от известного, повышается надежность, уменьшается вес и габариты элементов контура самонастройки, так как в нем отсутствуют малонадежп 1й и громоздкий масштабный элемент с электромеханическим приводом. Точность работы регулятора повьопается в результате того, что самонастройка производится по минимуму скоростной ошибки основного контура управления, а не по выходу дополнительного сумматора по модулю. Предлагаемый регулятор может найти применение в приборостроении и станкостроении. Формула изобретения Самонастраивающийся регулятор, со держащий эадатчик скорости, последовательно соединенные задатчик положения, элемент сравнения, сумматор, усилитель и исполнительный элемент, а также датчик обратной связи, выход которого соединен со вторым входом элемента сравнения, выходом подключе ного через датчик скорости - к «второму входу сумматора, отличаюг;34 щ и и с я тем, что, с целью повышения точности и надежности регу-оятора, он содержит последовательно соединен №ле блок умножения, интегратор, широтно-импульсай модулятор, ключ, масштаб нлй блок и 4ильтр низкой частоты, выход которого соединен с третьим входом сумматора, первый вход блока умножения соединен с выходом задатчика скорости и вторым входом ключа, а второй вход - с выходом элемента сравнения. Источники информации, принятые во внимание при экспертизе 1.Бессекерский В.А. и др. Теория систем автоматического регулирования М., Наука, 1975, с.251. . 2.Авторское свидетельство СССР 548838, кл. G 05 В 13/02, 1977 (прототип).
