(54) СИСТЕМА УПРАВЛЕНИЯ РАБОЧШ ОРГАНОМ СНЕГООЧИСТИТЕЛЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления рабочим органом снегоочистителя | 1977 |
|
SU654727A1 |
| Система управления рабочим органом снегоочистителя | 1982 |
|
SU1046393A2 |
| ПЛУЖНЫЙ СНЕГООЧИСТИТЕЛЬ | 1991 |
|
RU2022079C1 |
| Гидравлическая система управления установкой рабочего органа уборочной машины | 1979 |
|
SU870567A1 |
| Снегоочиститель | 1981 |
|
SU983171A1 |
| Гидропривод снегоочистителя с навесным рабочим органом | 1982 |
|
SU1049610A1 |
| Портальный погрузчик | 1980 |
|
SU954371A1 |
| Устройство для разрушения горных пород | 1990 |
|
SU1710721A1 |
| Следящая система управления рабочим органом | 1985 |
|
SU1293287A1 |
| Система управления рабочим органом | 1982 |
|
SU1040031A1 |
I
Изобретение относится к снегоо Шстительной технике и может быть кспот зовано при управлении рабочими органами уборочных машин.
Известна система управления рабо-г чим органом снегоочистителя, содержащая силовой цилиндр подъема рабочего органа с сообщанщимися магистралями между собой через распределители. IBTOковой и бесштоковой полостями, в последней из которых р 1зме1цен плавакщий поршень, и пружину, установленную между поршнем и плавающим поршнем IJ.
Недостатком указанной системы уп равления является узкий диапазон регулировки высоты стопорекия штока силового цилиндра при подъеме рабочего органа.
Цель изобретения - повышение эфгфиктивности системы управления.
Указанная цель достигается тем, что система управления рабочим сфганом снегоочистителя снабжена двумя напорными золотниками, включенными.
параллельно в указанную магистраль, а в штоке силового цилиндра вьшолнен сквозной канал, сообщенный со сливной магистралью и бесштоковой полостью.
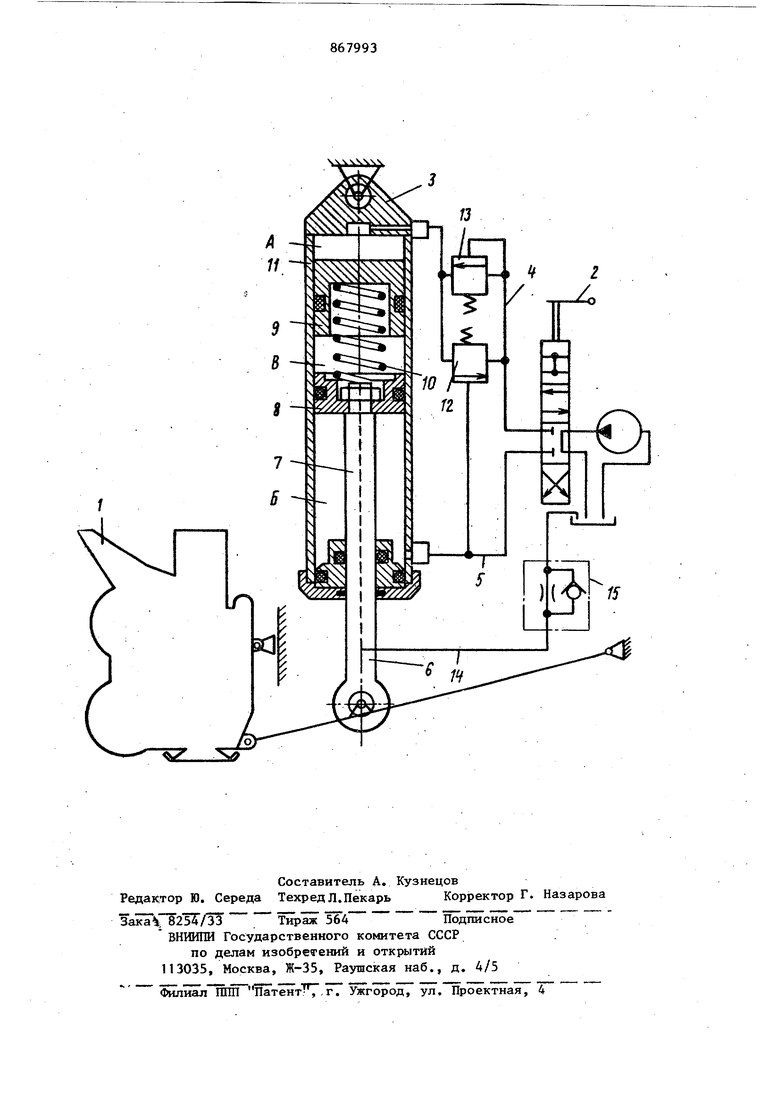
На чертеже схематически изображена предлагаемая система управления.
Система управления содержит объект управления - рабочий орган 1, расп10ределитель 2, силовой цилиндр 3 с бесштоковой А и штоковой Б полостями, сообщающимися магистралями 4 и 5. Силовой цилиндр 3 содержит шток 6 со сквозным каналом 7 и поршнем 8,
15 плавающий поршень 9, размещенный в бесштоковой полости А и образующий полость (межпоршневую) В, пружину 10, гильзу П. Разветвляющаяся надвое магистраль 4 имеет з каждой ветгови по напорному золотнику 12 и 13, магистрали управления которь1ми подсоединены у одного - к магистрали 4, у другого - к магистратти 5. Сквозной канал 7 соединен со сливным баком системы через трубопровод 14 и клапан (дроссельный и обратный) 15. Система управления действует, следуннцим образом. При опускании рабочего органа 1 распределителем 2 подают рабочую жидкость под давлением в магистраль 4, что приводит к переключению напорного золотника 13 и соединению полости А с насосом. Одновременно полость Б соединяется со сливом. Пружина Го при этом отжимает поршень 8 вниз и к моменту контакта рабочего органа с очищаемой поверхностью образуется гарантированный объем поло.сти В, подпитка которой осуществляется из бака через свободно открывающийся в сторону гидроцилиндра клапан 15. Рабочий орган может быть опущен и при соединении со сливной магистралью полости Б. При этом поршень 9 остается в крайнем верхнем положении. Дпя его установки в необходимое для снегоочистки положение необходимо осу ществить подачу рабочей жидкости в полость А. Поэтому этот прием опускания рабочею органа можно рекомендовать ДПЯ проведения снегоочистки слабого и рыхлого снега и ремонтных операций . В момент контакта рабочего органа с очищаемой поверхностью распределитель 2 переводят в плавающее положение, в котором он находится постоянно при проведении снегоочистки, за исключением случаев критических ситу ций, когда оператор должен взять управление на себя. йКолебания снегоочистителя, вызван ные неровностью очищаемой полосы, не передаются рабочему органу, так как ход поршня 8 в полостях Б и В, соединенных со сливной магистралыо, ком пенсирует эти колебания. При этом ход поршня 8 вверх встречает сопротивление замедлительного клапана 15 и нарастающее сопротивление пружины 10, а ход вниз осуществляется свободно, что способствует лучшему приспособлению рабочего органа к профилю очищаемой поверхности. 9 Всштавание рабочего органа, вызванное повьппенной прочностью ррзра.батываемого снега, встречает сопротивление перетеканию рабочей жидкосг ти из полости В на слив по каналу 7. трубопроводу 14 и клапану 15, а так84 е сопротивление пружины 10. При полом выборе рабочего хода поршня 8, ызванном всплыванием рабочего оргаа, цилиндр 3 оказывается в нейтральом со стороны полости А положении, то обеспечивает принудительную разаботку прочного снега, благодаря ередаче на рабочий орган дополниельно части весовой нагрузки шасси негоочистителя. После прохода участка повышенной рудности разработки рабочий орган од действием собственной массы опусито. и дальнейшая работа будет просходить,в описанном вьште режиме. При необходимости изменения величины .свободного хода поршня 8 распределителем 2 полость А соединяют с насосом, что приводит к уменьшению объема полости В и уменьшению величины свободного хода. Увеличение объема полости В достигается соединением полости Б с насосом, что обеспечивает давление в магист1..апи управления напорного золотника 12 его открытие и соединение полости А со сливной магистралью. Таким образом, регулировочное перемещение поршня 9 вниз осуществляется за счёт непосредственного давления рабочей жидкости, а вверхза счет приподъема и последующего опускания поршня 8. По окончании регулировки, производимой оператором по результатам контрольных заездов и накопленного опыта и учитывающей состояние снега дорожного покрытия и погодные условия, распределитель 2 снова переводится в плавающее положение для продолжения снегоочистки. При подъеме рабочего органа распределителя 2 соединяют полость Б с насосом, а полость А - через открывающийся на это время напорный золотник 12 со сливной магистралью. При д;вижении поршня- 8 вверх вначале произойдет выдавливание рабочей жидкости из полости А на слив при совместном движении с поршнем 9, подталкиваемом пружиной 10, а затем движение поршня 8 и сжатие пружины при одновременном непрерьюном подъеме рабочего органа в транспортное положение, Движение вверх прекратится при упоре торца поршня 8 в торец поршня 9, а последнего - в торец гильзы 11 По окончании подъема распределитель 2 переводят в нейтральное положение и полость Б оказывается запертой, чт обеспечивает фиксацию поднятого рабочего органа. Клапан 15 серийной конструкции может быть встроен в любой точке сливной магистрали, состоящей из сквозного канала 7 и трубопровода 14, в том числе и непосредственно со стороны полости В. Упрощение изготовления сквозного канала достигае ся применением трубчатой конструкции штока 6, Система управления, в которой используются серийные распределитель и напорнь е золотники, позволяет упростить конструкцию и технологио изготовления гидроцилиндра и за счет регулируемого изменения объема межпоршневой полости лучше приспособить снегоочиститель к переменным условия профиля дорожного покрытия, состояни снега и погоды. Тем самым повышается универсальность системы управления, которая может быть использована как на аэродромных, так и на дорожных сн гоочистителях, Возможным вариантом конструктивно го исполнения запирающего элемента в трубопроводе к полости А может быт установка золо- ников с электро-, или ручным управлением. Предлагаемое техническое решение позволяет улучшить качество снегоочистки с любых покрытий и одновременно упростить технологию и снизить стоимость изготовления системы. . Формула изобретения Система управления рабочим органом снегоочистителя, содержащая силовой цилиндр подъема рабочего органа с сообвсающимися магистралью между собой через распределитель штоковой и бесштоковой полостями, в последней из которых размещен плавающий , и пружину, установленную между поршнем и плавающим поршнем, -отличающаяся тем, что, с целью повышения эффективности, она снабжена двумя напорными золотниками, включенными параллельно в указанную магистраль, а в штоке силового цилиндра выполнен сквозной канал, сообщенный со сливной магистралью и бесштоковой полостью. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 654727, кл. t О Н 5/09, 15.12.77.
