диняются с напорной и сливной магистралями управляющим распределителем (УР) 3 с шестерней 14 на золотнике 11. Она установлена с возможностью поворота и зацепления с зубчатыми рейками 15, 16. Рейка 15 кинематически соединена с рычагом 2 управления, а рейка 16 - с механизмом 7, Между УР 3 и цилиндром 1 установлен информационный распределитель (ИР) 4 с двухстут1енчатыми торцовыми полостями и установленным в его корпусе 30 подпружиненным с двух сторон цилиндрическим полым золотником 31 с двумя ттоками 34, 35. Меньшие ступени полостей ИР 4 радиальными каналами 27, 28,29 сообщены с участками рабочих магистралей 25, 26, расположенных между УР 3 и ИР 4. На торцовых частях корпуса 30 закреплены
1
Изобретение относится к строительному и дорожному машиностроению а именно к следяп5им гидросистемам управления рабочим органом землерой но-транспортных машин.
Цель изобретения - повьтение эффективности работы следящей системы путем обеспечения выр.аботки информационного сигнала о соответствии положения рабочего органа задающему положению рычага управления.
На чертеже изображена следящая система управления рабочим органом.
Следящая система управления рабочим органом включает силовой цилиндр 1, рычаг 2 управления, управляющий распределитель 3 и информа- ционньш распределитель 4. Силовой цилиндр 1 содержит поршень 5, шток
6которого соединен с механизмом
7подъема рабочего органа 8,
Рычаг 2 управления со шкалой указателя 9 служит для выработки управляюш.его сигнала исполнительным элементом гидросистемы, обеспечивающим подъем или опускание рабочего органа 8 на строго определенную величину, соответствующую положению рычага 2 управления относительно шкалы указателя 9.
соединенные со штоками 34, 35 концевые выключатели-36, 37. На поверхнсти золотника 31 вьтолнены пять проточек 39, 40 41, 42, 43. Крайние из них, Бьпсодящиа на торцы золотника 31, соединены с его полостью радиальными отверстиями 44, 45, а средние расположены с возможностью сообщения через них посредством сквозных радиальных каналов в корпусе полостей цилиндра 1 с УР 3. При отклонении РО 8 вверх или вниз от заданного рычагом 2 положения перемещаются соответственно рейки 15 или 16. Нарушается равновесие золотника 31, Его штоки 34, 35 воздействуют на соответствующие выключатели 36 и 37 и загорается контрольная лампочка 38. Цилиндр 1 через механизм 7 опускает или поднимает РО В. 1 ил.
Распределитель 3 обеспечивает соединение напорной и сливной магистралей с соответствующими полостями силового цилиндра 1 в ходе пере- 5 мещения рабочего органа 8, а также запирание полостей силового цилиндра 1 и фиксирование рабочего органа 8 в соответствующем рычагу 2 управления положении в процессе рабочего 0 хода землеройно-транспортной машины и состоит из подпружиненного пружиной JO золотника 11, находящегося в н€ подвижном корпусе 12. На штоке 13 золотника 11 закреплена с воз- можностью поворота шестерня 14, находящаяся в зацеплении с зубчатыми рейками 15 и 16. Рейка 15 через зубчатый сектор 17 связана ,с рычагом 2 управления, а рейка 16 обрат0 ной связи кинематически через механический привод I8 соединена с механизмом 7 подъема рабочего органа 8„ На цилиндрической поверхности корпуса 12, ответной золотнику 11,
вьтолнены четыре проточки 19, 20, 21 и 22, соединенные соответственно с рабочими магистралями 23 и 24 подвода рабочей жидкости к распределителю 4, магистралью 25 и магистралью 26, кроме того, в корпусе имеется три радиальных канала 27,
28и 29, крайние из которых 27 и
29соединены с магистралью 25, а средний 28 - с магистралью 26.
Сущность изобретения заключается в том, что следящая система управления рабочим органом дополнена информационным распределителем 4, установленным в гидросистему между распределителем 3 и силовым цилиндром 1 и предназначенным для выработки информационного сигнала о соответствии положения рабочего органа 8 задающему положению рычага управления. Распределитель 4 содержит корпус 30, в котором установлен двухштоковый полый золотник 31, подпружиненный с двух сторон пружинами 32 и 33, Штоки 34 и
35золотника 31 кинематически соединены с концевыми выключателями
36и 37, закрепленными на торцовьк частях корпуса 30 и электрически параллельно связанными через сигнальную электроцепь с контрольной лампочкой 38, установленной в отделении оператора (на чертеже показано пунктирной линией). На цилиндрической поверхности золотника выполнены пять проточек 39, 40, 41, 42 и 43, крайние из которых 39 и 43 выходящие на торцовые стороны золотника, соединены радиальными отверстиями 44 и 45 с полостью золотника, разделенной в средней части на две камеры 46 и 47 соосно установленным дросселем 48. На внутренней поверхности корпуса 30, ответной зо- лотнику 31, имеются отсекающие ограничительные пояски 49 и 50, делящие каждую торцовую полость на две ступени или камеры переменного 51
и 52 и постоянного 53 и 54 объемов. Кроме того, в корпусе выполнены связанные с гидравлическими магистралями 23 и 24 сквозные радиальные каналы 55 и 56 подвода рабочей жидкоети от распределителя 3 к силовому цилиндру 1, перекрываемые цилиндрическими поясками 57 и 58, образованными средними проточками 40, 41 и 42 на поверхности золотника 31, и два радиальных отверстия 60, соединяющие полости 53 и 54 постоянного объема через гидромагистрали 61, 62 23 и 24 со сквозными радиальными.каналами 55 и 56.
При движении землеройно-транспорт ной машины в процессе рабочего хода рабочий орган 8, например бульдозер
находится в строго определенном положении относительно опорной поверхности ходового оборудования, соответствующем положению рычага 2 управления относительно шкалы указателя 9. Фиксированное положение обеспечивается запиранием полостей силового цилиндра 1, когда магистрали 23 и 24 подвода рабочей жидкости к силовому
цилиндру перекрыты золотником 11,
при этом рабочая магистраль 26 соединена с магистралью 25 через проточки
22и 21, в результате чего обеспечивается разгрузка распределителя 3.
В этом случае распределитель 4 находится в исходном положении, т.е. золотник 31 занимает среднее уравнове- шенное пружинами 32 и 33 положение, при котором цилиндрические пояски
57 и 58 перекрывают сквозные радиальные каналы 55 и 56. Полости, об- разованные камерами 51, 53 и-52, 54 сообщаются между собой через проточку 43, отверстия 45, камеру 47,
дроссель 48, камеру 46, отверстия 44 и проточку 39, в результате чего давления в торцовых полостях золотника 31 выравнены. Выключатели 36 и 37 выключены, контрольная лампочка
38 не горит, что свидетельствует о том, что имеет место соответствие между положением рабочего органа 8 и рычагом 2 управления.
При переводе рычага 2 управления
в новое положение, например вверх на требуемую величину, которая контролируется оператором по шкале указателя 9, зубчатая рейка 15 перемещается вниз, обусловливая перемепение в том же направлении шестерни |14, относительно неподвижной в данный {момент времени рейки обратной связи 16. В результате этого золотник 11 переместится и займет положсние, при котором гидромагистраль
23через проточку 19 и отверстие 27 соединяется с магистралью 25 слива,
.магистраль 24 через проточку 20 и отверстие 28 соединяется с магист
ралью 26, а проточка 21, постоянно соединенная со сливной магистралью 25, будет перекрыта золотником 11, обеспечивал на определенное время изоляцию магистрали 26 от магистрали 25.
Рабочая жидкость под давлением, создаваемым насосным агрегатом (не показан), через рабочую магистраль 26 а отверстие 28, проточку 20, магистрали 24 и 62, радиальное отверстие 60 поступает в камеры 54 и 52 распределителя 4, создавая в данной полости избыточное давление. Одновременно камеры 51 и 53 через отверстие 59, магистрали 61 и 23, проточку 19, отверстие 27 соединяются с магистралью 25 слива. Рабочая жидкость в начальный момент времени будет частично поступать в противоположную торцовую полость, образованную камерами 51 и 53, через проточку 43, отверстия 45, камеру 47, дроссель 48, камеру 46, отверстия 44 и проточку 39. Однако дроссель 48, создавая значительное гидравлическое сопротивлениеj обеспечит необходимую для нарушения равновесия золотника
31величину давления в камерах 54 и 52. Равновесие золотника 31 нарушается и он перемещается, сжимая пружину
32и уменьшая размеры камеры 51 переменного объема, рабочая жидкость из камер 51 и 53 уходит в сливную магистраль 25. Золотник 31 перемещается до момента упора торца в отсекающий ограничительный поясок 49, обеспечивая тем самым изоляцию камеры
53 постоянного объема, соединенной со сливом от проточки 39, соединенной с противоположной торцовой полостью, находящейся под давлением. При этом магистраль 24, находящаяся под давлением, через радиальный канал 56 и проточку 4.2 золотника 31 соединяется с бесштоковой полостью силового цилиндра 1, а магистраль 23 через радиальный канал 55 и проточку 40 соединяется со штоковой полостью силового цилиндра I, обеспечивая соединение этой полости со сливом. Кроме того, в результате воздействия штока 34 срабатывает концевой выключатель 36, обуславливая загорание контрольной лампочки 38 в отделении оператора, что информирует оператора о том, что положение рабочего органа 8 не соответствует задающему положению рычага 2.
Поршень 5 силового цилиндра 1 цод действием давления рабочей жидкости перемещается, обеспечивая через шток 6 механизма 7 подъема опускание рабочего органа 8, Перемещение последнего через механический привод 18 передается на рейку 16 обратной связи, движение которой вверх в свою очередь обуславливает перемещение в том же направлении шестерни
14 относительно неподвижной в данном случае рейки 15. В-результате золотник 11 будет перемещаться в сторону исходного положения. При возвращении
в исходное положение золотник 11 перекроет проточки 19 и 20, соединенные с магистралями 23 и 24, и соединит через проточки 21 и 22 нагнетающую магистраль 26 с магистралью 25.
Отсечка магистрали 24 от магистрали 26 обеспечивает снятие избыточного давления в камерах 52 и 54 распределителя 4, в результате чего золотник 3 под действием сжатой пружины 32
перемещается в сторону среднего (уравновешенного) положения, шри этом осуществляется перетекание рабочей жидкости из камер 54 и 52 в камеры 51 и 53 через проточку 43, отверстия
45, камеру 47, дроссель 48, камеру 46, отверстия 44, проточку 39. При возвращении золотника 3 в исходное положение, каналы 55 и 56 вновь перекрываются цилиндрическими поясками
57 и 58 золотника 31, а концевой выключатель 36 отключается, снимая электрический сигнал с контроль юй лампочки 38 что информирует оператора о том, что цикл отработки командного сигнала следящей гидравлической системой окончен, и рабочий орган 8 занимает положение, соответствуюшее задающему положению рычага 2 управления.
В том случае, если рабочий орган 8 не опустился на требуемую величину заглубления, например по причине упора бульдозера в каменные включения, система обратной связи не передаст сигнал отработки на управляюп1ий распределитель 3. Е этом случае золотник 11 не вернется в исходное положение, а значит не вернется в исходное положение и золотник 31 распределителя 4,, т.е. сигнал с концевого выключат шя 36 не снимется, что обусловит горение контрольной лампочки 38, информирующей оператора о том что рабочий орган не занял требуемого положения.
При переводе рычага 2 управления вниз все гидравлические элементы следящей системь управления работают аналогично, но в противоположном рассмотренному направлении. Рейка 15 перемещается вверх, увлекая за собой шестерню 14 и соответственно золотник 1i. Последний перекрьгоает проточку 26, обеспечивая соединение нагне
тающей магистрали 26 через отверстие 28 и проточку 19 с магистралями 23 и 61 и магистрали 25 слива через проточки 21 и 20 - с магистралями 24 и 62, В результате рабочая жидкость под давлением поступает в камеры 53 и 51 и перемещает золотник 31, сжимая пружину 33, до момента упора торца золотника 31 в отсекающий ограничительный поясок 50, при этом срабат вает концевой выключатель 37, формирующий электрический сигнал на контрольную лампочку 38, и обеспечивается подвод рабочей жидкости под давлением из магистрали 23 через канал 55 и проточку 40 в штоковую полость силового цилиндра, который обеспечивает поднятие рабочего органа 8. При согласовании рабочего органа с положением рычага 2 управления золотник 11 возвращается в исходное положение обуславливая возврат в исходное положение и золотника 31 распределителя 4, в результате чего выключатель 37 снимает электрический сигнал с контрольной лампочки 38, В случае, если по каким-либо причинам рабочий орган не поднялся на требуемую величину, .например в транспортное положение, контрольная лампочка горит, оператор, имея об этом информацию, не начнет движения, что может привести К перегрузкам машины, а примет меры к выяснению причин.
Формула изобретени
Следящая система управления ра- бочим органом, включающая силовой цилиндр, соединенный с механизмом подъема рабочего органа, управляющий распределитель .с шестерней на
Составитель С.Фомин Редактор М.Петрова Техред М.Ходанич Корректор А.Зимокосов
Заказ 354/31 Тираж 607Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород,ул. Проектная, 4
5
5 0
0
5
0
5
0
золотнике, которая установлена с возможностью поворота и зацепления с зубчатыми рейками, одна из которых кинематически соединена с рычагом управления, а другая - с механизмом подъема рабочего органа, о т- личающаяся тем, что, с целью повышения эффективности ее работы путем обеспечения выработки информационного сигнала о соответствии положения рабочего органа задающему положению рычага управления, система снабжена сигнальной электроцепью с концевыми выключателями и контрольной лампочкой и информационным распределителем с двухступенчатыми торцовыми полостями, в корпусе которого установлен подпружиненный с двух сторон двухштоковый полый золотник, полость которого разделена посредством расположенного в ее средней части дросселя, а штоки кинематически связаны с кЪнцевыми выключателями, закрепленными на торцовых частях корпуса информационного распределителя, меньшие ступени торцовых полостей которого посредством радиальных каналов в корпусе сообщены с участками рабочих магистралей, расположенных между управляющим и информационным распределителями,при этом на цилиндрической поверхности золотника выполнены пять проточек, крайние из которых, выходящие на торцовые стороны золотника, соединены посредством радиальных отверстий с полостью золотника, а средние расположены с возможностью сообщения через них посредством сквозных радиальных каналов в корпусе полостей силового цилиндра с управляющим распределителем.

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидросистема для управляемого перемещения станочных узлов | 1974 |
|
SU559808A1 |
| Модуль промышленного робота | 1985 |
|
SU1299780A1 |
| Гидропневмоударная трамбовка | 1990 |
|
SU1742417A1 |
| Гидропривод бульдозера | 1988 |
|
SU1587156A1 |
| Гидравлическая система управления поворотом гусеничной машины | 1979 |
|
SU887333A1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ГИДРОМЕХАНИЧЕСКИЙ ПРИВОД ДЛЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2004 |
|
RU2266234C1 |
| Гидровлическая система трактора с гидропневматической подвеской задних колес | 1973 |
|
SU511887A1 |
| Гидравлическая система управления рабочим органом землеройной машины | 1976 |
|
SU749997A1 |
| Система управления пневматическим молотом | 1987 |
|
SU1438902A1 |
| Гидравлический привод бульдозера-аутригера | 1986 |
|
SU1362794A1 |
Изобретение относится к строительному и дорожному машиностроению. Цель - повышение эффективности работы следящей системы путем обеспечения выработки информационного сигнала о соответствии положения рабочего органа (РО) 8 земперойно-транс- портной машины задающему положению рычага 2 управления. Силовой цилиндр 1 системы соединен с механизмом 7 подъема РО 8. Полости цилиндра 1 йоес S (Л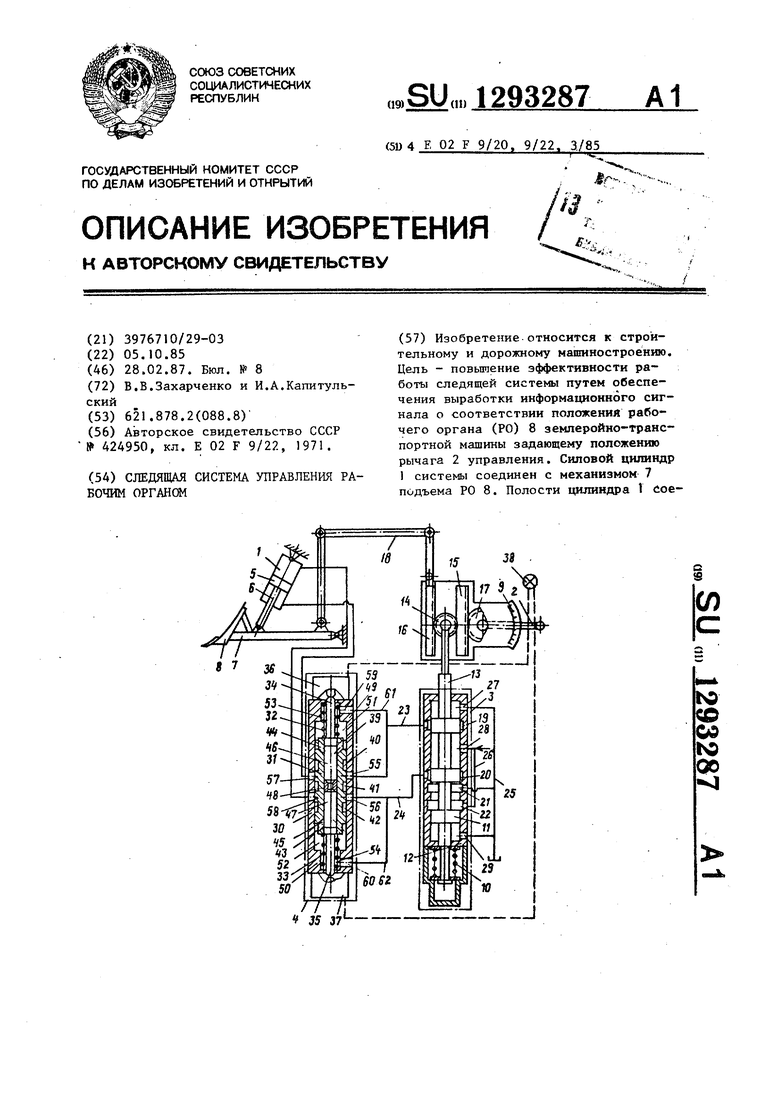
| Замок для удержания протезов во рту | 1927 |
|
SU24950A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
