(54) МЕХАНИЗМ ПОВОРОТА КОВША ПОГРУЗОЧНОЙ
I
Изобретение относится к шахтным погрузочным машинам, в частности к устройствам для управления ковшовым рабочим органом гидравлических погрузочно-транспортных машин.
Известен механизм поворота ковша, состоящий из рукояти, гидроцилиндров рукояти и ковша, управление которыми при разгрузке ковша производится вручную рычагами системы управления, осуш,ествляя при этом подъем рукояти на требуемую высоту, а затем - опрокидывание ковша для его разгрузки 1.
Недостатком известного механизма является неудовлетворительная точность, а также большая продолжительность операции разгрузки.
Наиболее близким техническим решением к предлагаемому является механизм поворота ковша погрузочной машины, содержащий гидроцилиндры поворота ковша и рукояти, установленной на поворотной оси, датчик положения рукояти для взаимодействия с гидроцилиндрами, и кулачок со ступицей, связанный с рукоятью и установленный с возможностью взаимодействия с датчиком
МАШИНЫ
Однако, данная конструкция механизма поворота ковша не обеспечивает точность наведения ковша над местом его выгрузки, что связано с известными затратами времени, энергии и снижением производительности машины.
Цель изобретения - обеспечение точности наведения ковша над местом выгрузки.
Поставленная цель достигается тем, что в механизме поворота ковша погрузочной
fO машины, содержащий гидроцилиндры поворота ковша и рукояти машины, установленной на поворотной оси, датчик положения рукояти для взаимодействия с гидроцилиндрами, и кулачок со ступицей, связанный с рукоятью и установленный с возможностью
15 взаимодействия с датчиком. Ступица кулачка и поворотная ось рукояти выполнены со шлицами, кулачок расположен на оси рукояти посредством шлицев с возможностью его поворота относительно оси.
Такая конструкция механизма поворота
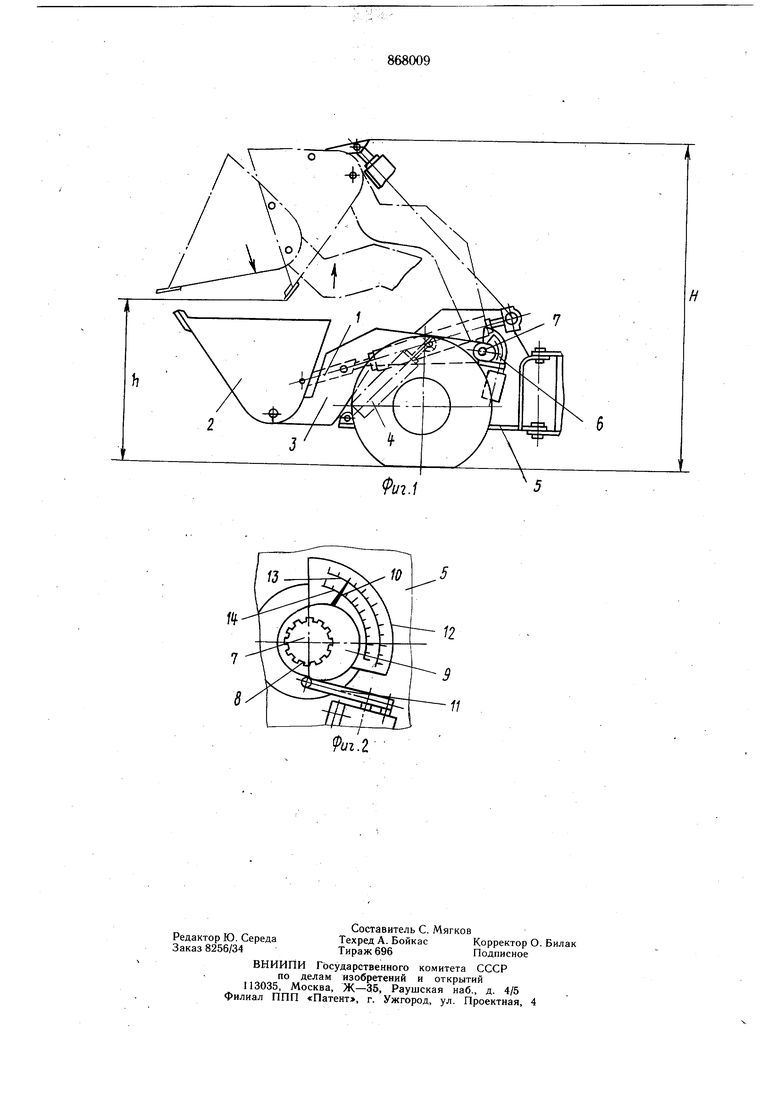
20 ковша позволяет предварительно устанавливать кулачок на поворотной оси рукояти с определенным заданным углом отклонения относительно датчика. Кулачок воздействует во время подъема стрелы на гидросистему механизма поворота ковша, поэтому совмещается подъем рукояти с поворотом ковша. Разгрузка проводится над разгрузочными объектами уменьшенной высоты, вместе с тем уменьшаются ударные нагрузки от падения кусков материала на дниша приемных устройств. На фиг. 1 показан ковш, механизм поворота; на фит. 2 - устройство для регулирования начала взаимодействия кулачка с датчиком. Механизм поворота ковша (фиг. 1) состоит из гидроцилиндра 1 поворота ковша 2, рукояти 3 и гидроцилиндра 4 подъема рукояти, шарнирно закрепленной на раме 5 машины. Рукоять 3 крепится к раме 5 посредством поворотной оси 6, на хвостовике 7 которой выполнены шлицы 8. На шлицах 8 установлен кулачок 9 с указателем (стрелкой) 10, а на раме 5 закреплен датчик 11. На раме 5 (фиг. 2) сбоку от кулачка 9 закреплена пластина 12 со шкалами 13 и 14. На шкале 13 нанесены расстояние h просвета между почвой и передней кромкой опрокинутого ковша 2, а на шкале 14 - высотный габарит Н выступающей донной части опрокинутого ковша 2. Д/я управления гидроцилиндрами 1 и 4 в кабине машины установлены золотники (не показаны). В зависимости от условий разгрузки ковша 2 производят настройку механизма поворота ковша путем изменения исходного положения кулачка 9. Так, например перед разгрузкой материала в приемную емкость определенной высоты, кулачок 9 устанавливают на шлицах 8 таким образом, чтобы стрелка 10 указывала на шкале 13 величину несколько больше габарита высоты приемной емкости, при этом по шкале 14 оценивают возможность разгрузки в выработке. При разгрузке ковша 2 в рудоспуск или непосредственно на почву, когда h О в выработке ограниченной высоты, кулачок 9 устанавливают без зазора с контактными элементами датчика 11, также оценивая при этом возможность разгрузки в данной выработке по шкале 14. Такая предварительная установка кулачка 9 на заданный угол его отклонения относительно датчика 11 обеспечивает автоматически с подъемом рукояти 3 и разгрузку ковша 2 следующим образом. Посредством управления гидроцилиндром 4 производят подъем рукояти 3, заодно с рукоятью 3 поворачиваются ось 6 и кулачок 9. При этом кулачок 9 первоначально поворачивается на определенный (в зависимости от настройки) .угол без контакта с датчиком И, затем при последуюшем движении рукояти 3 и кулачка 9 происходит нажатие кулачка на контактный элемент датчика И. Импульс от датчика 11 поступает на исполнительный механизм золотника управления (не показан), после чего соединяются соответственные полоСти гидроцилиндра 1 с нагнетательной или сливной магистралью и тем самым осуществляется опрокидывание ковша 2 в положение разгрузки или его возврат из этого положения. Таким образом, дальнейший подъем рукояти 3 автоматически совмещается с поворотом вниз ковша 2, что сокращает время разгрузки, гарантирует разгрузку в приемные емкости при оптимальной высоте подъема ковша 2. При повороте ковша 2 в положение разгрузки, подъем рукояти 3 прекращается путем ручного или же автоматического управления. Предлагаемое устройство сохраняет возможность независимой разгрузки ковша 2, (раздельного управления гидроцилиндрами Iи 4). Для этого кулачок 9 предварительно устанавливают в положение, при котором угол его отклонения относительного датчика I1равен или больше угла поворота рукояти 3 и при подъеме рукояти 3 не происходит нажима кулачка 9 на контактные элементы датчика 11. Возврат ковша 2 и рукояти 3 в транспортное положение производится при помощи ручного управления золотником. Применение предлагаемого устройства повышает эффективность разгрузки материала в приемные устройства в горных выработках малой высоты, так как сокращает продолжительность разгрузки и уменьшает динамические нагрузки на днища приемных емкостей. Формула изобретения 1.Механизм поворота ковша погрузочной машины, содержащий гидроцилиндры поворота ковша и рукояти машины, установленной на поворотной оси, датчик положения рукояти для взаимодействия с гидроцилиндрами, и кулачок со ступицей, связанный с рукоятью и установленный с возможностью взаимодействия с датчиком, отличающийся тем, что, с целью повышения точности наведения ковша над местом его выгрузки, ступица кулачка и поворотная ось рукояти выполнены со шлицами, а кулачок расположен на оси рукояти с возможностью его поворота относительно оси. 2.Механизм поворота ковша погрузочной машины по п. 1, отличающийся тем, что кулачок снабжен жестко прикрепленным к нему указателем, а рукоять - жестко связанной с ней шкалой для определения положения ковша над землей. Источники информации, принятые во внимание при экспертизе 1.Тихонов Н. В. и др. Шахтные погрузочно-транспортные машины. М., «Недра, 1976, с. 126-137 и 187-192. 2.Авторское свидетельство СССР по заявке № 2706989/29-03, кл. Е 02 F 9/20, 04.01.79 (прототип).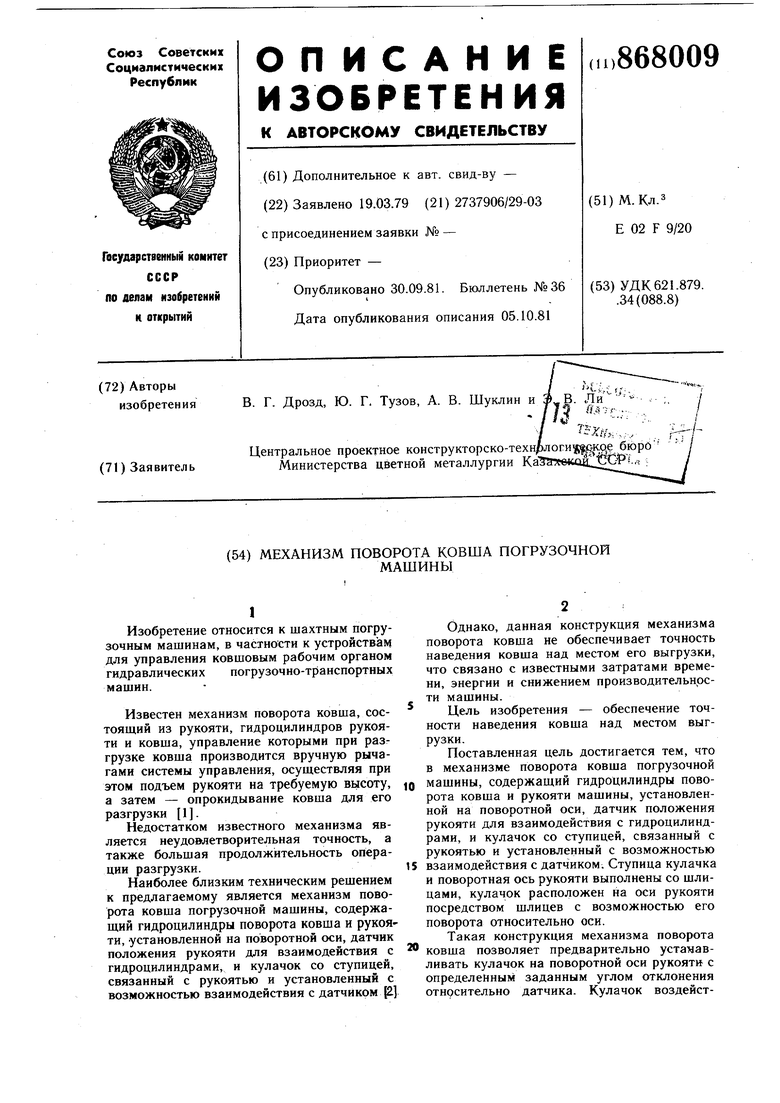
| название | год | авторы | номер документа |
|---|---|---|---|
| Ковшевая погрузочная машина | 1958 |
|
SU122119A1 |
| ПОГРУЗОЧНАЯ МАШИНА | 1995 |
|
RU2123593C1 |
| Погрузочная машина | 1982 |
|
SU1102997A1 |
| Устройство для погрузки и разгрузки железобетонных изделий | 1980 |
|
SU901256A1 |
| Рабочее оборудование гидравли-чЕСКОй эКСКАВАциОННОй МАшиНы | 1978 |
|
SU831902A1 |
| Рабочее оборудование гидравлического бульдозера | 2017 |
|
RU2652781C1 |
| СПОСОБ РАЗРАБОТКИ ГОРНО-ДОБЫЧНОГО ЗАБОЯ И КАРЬЕРНЫЙ КАНАТНЫЙ ЭКСКАВАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2455427C2 |
| ПОГРУЗОЧНАЯ МАШИНА | 1970 |
|
SU285868A1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ГИДРАВЛИЧЕСКОГО БУЛЬДОЗЕРА | 2011 |
|
RU2524791C2 |
| Погрузочная машина | 1984 |
|
SU1245695A1 |