I
Изобретение относится к механизмции погрузочно-разгрузочных работ при изготовлении плоских железобе тонных изделий, в частности плит полов.
Известно устройство для разгрузки и погрузки железобетонных изделий, содержащее полноповоротное основание,, несущее шарнирно-сочлененные стрелу и рукоять с гидроцилиндрами их поворота, при этом на конце рукояти установлен поворотный вокруг горизонтальной оси захват с гидроцилиндром его поворота, которой связан с механизмом, обеспечивающим горизонтальное положение изделий независимо от положений стрелы и рукояти 13.
Недостаток известного устройства состоит в том, что оно не обеспечивает точности захвата железобетонных изделий.
Цель изобретения - повышение производительности и обеспечение поворота захвата на ЗбО.
Поставленная цель достигается тем, что механизм выполнен в виде жидкостных датчиков, которые закреплены на захвате под углом друг к другу и подключены к гидроцилиндру его поворота, а внутренние части захвата, взаимодействующие с изделием, снабжены установленными на них искателями, связанными с гидроцилиндрами поворота стрелы и рукояти, и подпру10жиненными держателями.
Кроме того, ось поворота захвата снабжена жестко установленной на ней шестерней, а шток гидроцилиндра рейкой, взаимодействующей с шестер15ней.
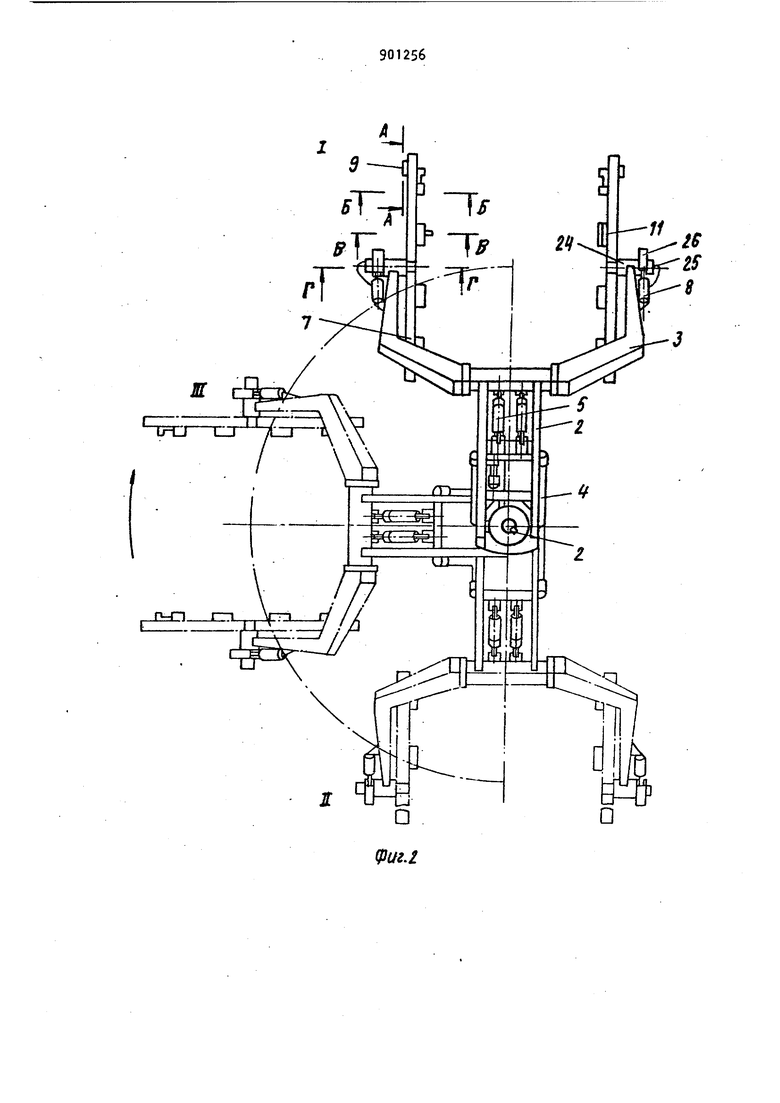
На фиг.1 показано устройство, общий вид, (положение I - разгрузка трехъярусной тележки,положение Я погрузка поддона на линию); на фиг.2
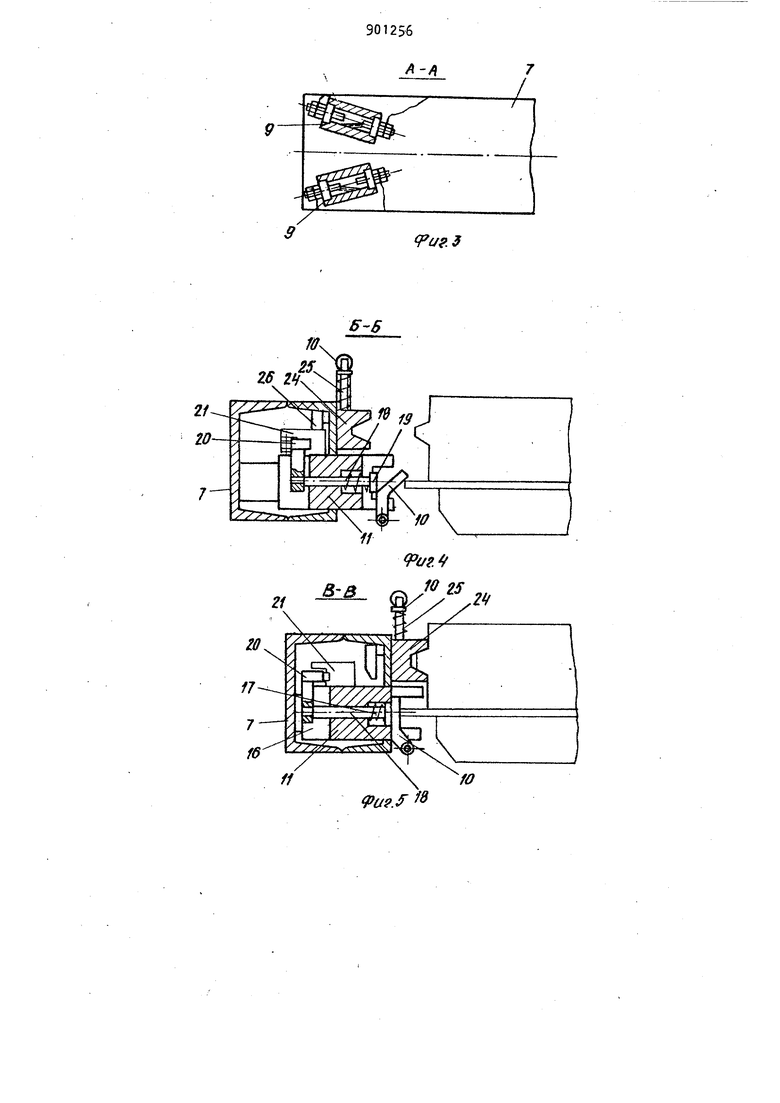
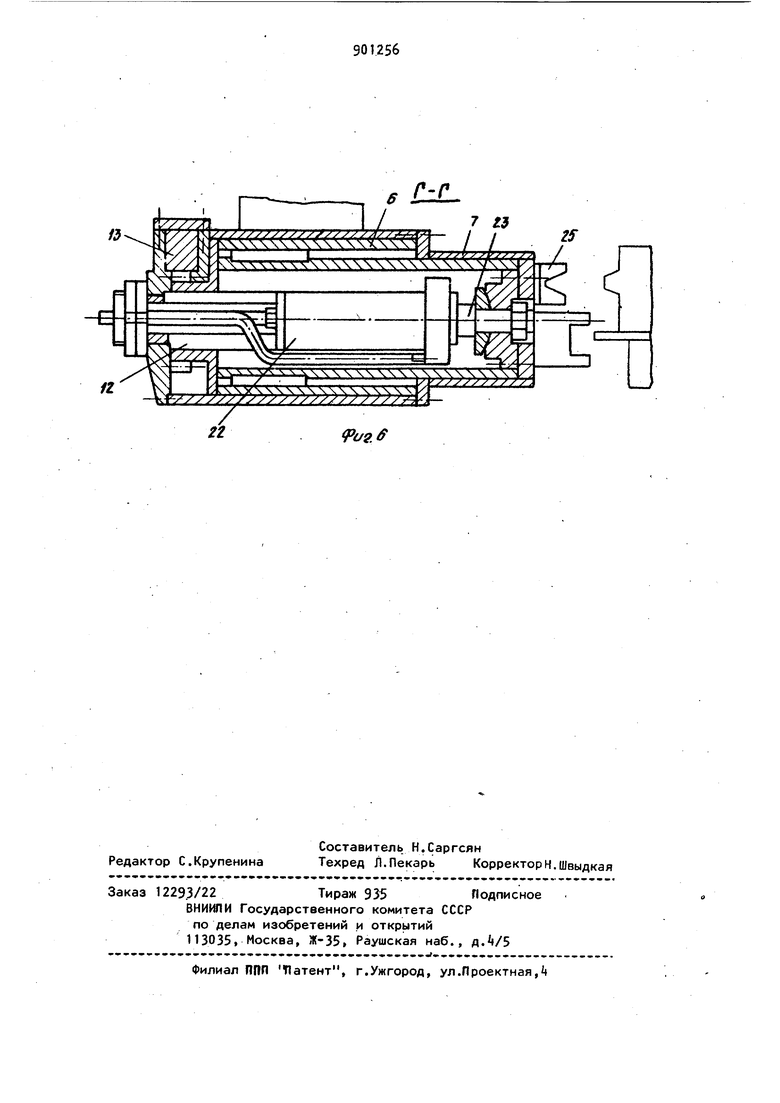
20 то же, вид в плане.(положение Ж кантование и погрузка изделия на тележку); на фиг.З - сечение А-А на фиг.2) на фиг. - сечение Б-Б на 39 фиг.2 (положение искателя поддона); на фиг.5 сечение В-В на фиг.2 (положение искателя поддона при зажиме изделия и поддона)J на фиг.6 - сечение Г-Г на фиг.2 (положение захвата в положении X) Устройство для погрузки и разгруз ки железобетонных изделий состоит из полноповоротного основания 1, которое несет шарнирно-сочлененные стрел ку 2 и рукоять 3 с гидроцилиндраии и 5 их поворота. На конце рукояти установлен поворотный вокруг горизонтальной оси 6 захват 7 с гидроцилиндром 8 его поворота, который снабжен механизмом .обеспечивающим горизонтальное положе ние изделия независимо от положения стрелы 2 и рукояти 3, выполненным в виде жидкостных датчиков 9, которые закреплены на захвате 7 под углом друг к другу и подключены к гидроцилиндру 8 о А внутренние части захвата 7 снабжены искателями 10 и держателями 11 .Ось 6 поворота захвата 7 снабжена жестко установленной наней шестерней 12, а шток гидроцилиндра 8 рейкой 13, взаимодействующей с шестерней 12. Основание 1 поворачивается посред- зо ством действия гидроцилиндра It. .
Железобетонное изделие укладывается на тележку 15.
В захвате 7 выполнен паз 16, в котором размещен держатель 11, находящийся в крайнем правом положении под действием пружины 17. В держателе 11 размещен толкатель 18, один конец 19 которого под действием пружины 17 находится в пазу держателя 11, а на другом конце толкателя закреплен кулачок 20, взаимодействующий с автоматическим выключателем 21, включенным в цепь управления гидроцилиндров А и 5.
Внутри захвата 7 расположен гидроцилиндр 22 зажима, жестко закрепленный на рукояти 3, и его шток 23 на захвате 7. На захвате закреплены конические выступы 2«,а;)Искатель 10 тележки 1 находится в выдвинутом положении под действием пружины 25, причем на одном его конце установлен кулачок 2б.
Устройство работает следующим образом.
В первоначальном положении стрела 2 и рукоять 3 с захватом 7 нахоопускания захвата 7. Одновременно дается команда на гидроцилиндр 22 на выдвижение захвата 7. Причем захват 7 с закрепленными на нем коническими выступами 2 и держателями 11 входит в соприкосновение с изделием и поддоном. При этом держатель 11 под действием поддона, преодолевая сопротивление пружины 17, входит внутрь захвата 7 до тех пор, пока выступы 24 войдут во взаимодействие с изделием.
Одновременно толкатель 18 под действием поддона, преодолевая сопротивление пружины 19 кулачком 20, дает команду на гидроцилиндры t и 5, подъема стрелы и рукояти с изделием до крайнего вертикального положения.
Стрела 2 при крайнем верхнем положении через автоматический выключлтел.ь дает команду на гидроцилиндр тА и поворачивает основание 1. Через автоматический выключатель дается команда
на гидроцилиндр 8 кантования изделия и поддона по часовой стрелке относительно горизонтальной оси на 180, после кантования через автоматический дятся в верхнем положении. При подходе teл еж ки Tt к положению I разгрузки она через автоматический выключатель (не показан) дает команду на гидроцилиндр 13 поворота основания 1 из положения П1 в положение I . В положении I дается команда на гидроцилинд1эы и 5 для опускания захвата 7. Горизонтальное положение изделия с поддоном осуществляется через замыкание контактов датчиков 9 жидкостью в результате чего дается автоматическая команда. При работе гидроцилиндра 8 рейка 13, взаимодействующая с шестерней 12, удерживает захват 7 в горизонтальном положении. При отклонении захвата 7 вверх замыкаются контакты одного из датчиков 9. Яри отклонении захвата 7 вниз замыкаются контакты второго датчика, расположенного к первому под углом. Горизонтальное положение достигается при любом положении .стрелы 2 и рукояти 3. Опускание захвата осуществляется до взаимодействия поддона с искателем 10. Последний через толкатель 18, преодолевая сопротивление пружины 19 кулачком 20 через автоматический выключатель 21, дает команду на гидроцилиндры 4 и 5 прекращения выключатель цепи управления - остан ва и опускания стрелы 2 и рукояти 3 Одновременно дается команда на г Фоцилиндры 22 разжима захвата 7. При разжиме конические выступы 2 захвата 7 освобождают изделие, кото рое ложится на тележку 15, держател 11 под действием пружины 17 удержи вает поддон. При этом захват 7 при разжиме изделия проходит одну треть своего пути. Далее подается команда через автоматический выключатель на гидроцилиндры t и 5. В крайнем верхнем положении поддон кантуется против часовой стрелы, т.е. в первоначальное положение. После кантования под дона дается команда через автоматический выключатель на гидроцилиндр поворота основания 1. После поворота команда дается на гйдроцилиндры и 5 для опускания поддона. Далее цикл повторяется. Изобретение обеспечивает автоматическую погрузку и разгрузку в пос тоянном горизонтальном положении, и кантования изделий с поддоном при любом положении стрелы и рукояти. Формула изобретения 1.Устройство для погрузки и разгруз ки железобетонных изделий, содержащ полноповоротное основание, несущее шарнирно-сочлененные стрелу и рукоять с гидроцилиндрами их поворота, при этом на конце рукояти установлен поворотный вокруг горизонтальной оси захват с гидроцилиндром его поворота, который связан с механизмом, обеспечивающим горизонтальное положение изделий независимо от положений стре лы и рукояти, отличающееся тем, что, с целью повышения производительности, механизм выполнен в виде жидкостных датчиков, которые закреплены на захвате под углом друг к другу и подключены к гидроцилиндру его поворота, а внутренние части захвата, взаимодействующие с изделием, снабжены установленными на них искателями, cвязaнны и с гидроцилиндрами поворота стрелы (; рукояти, и подпружиненными держателями. 2. Устройство по п.1, о т л и чающееся тем, что, с целью обеспечения поворота захвата на ЗбО , О9Ь захвата снабжена жестко установленной на ней шестерней, а шток гидроцилиндра - рейкой, взаимодействующей с шестерней. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР N° , кл. В 66 С 1/68, 197 (прртотйп).
A-f{
f/.S
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для погрузки длинномерных изделий | 1974 |
|
SU529940A1 |
| УСТРОЙСТВО для ПОГРУЗКИ ДЕРЕВЬЕВ | 1973 |
|
SU375054A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2168457C2 |
| УСТРОЙСТВО ДЛЯ ПОГРУЗКИ ДЕРЕВЬЕВ | 1966 |
|
SU214227A1 |
| МАНИПУЛЯТОР | 1999 |
|
RU2167805C1 |
| Исполнительный орган проходческого комбайна | 1989 |
|
SU1724865A1 |
| Лесозаготовительная машина | 1990 |
|
SU1808261A1 |
| КАНАВООЧИСТИТЕЛЬНАЯ МАШИНА ДЛЯ ГОРНЫХ ВЫРАБОТОК | 1991 |
|
RU2027020C1 |
| ОДНОКОВШОВЫЙ ЭКСКАВАТОР-ПОГРУЗЧИК | 1993 |
|
RU2072017C1 |
| БУРОКРЕПЕЗАЧИСТНОЙ МОДУЛЬ | 1994 |
|
RU2079663C1 |

P(/2.ff
