(54) СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА .МАСС ИЗДЕЛИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат центра тяжести изделий | 1978 |
|
SU789692A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2011 |
|
RU2476843C1 |
| Устройство для определения координат центра масс изделия | 1987 |
|
SU1467409A1 |
| Устройство для определения массы и трех координат центра масс изделия | 1983 |
|
SU1128127A1 |
| Устройство для определения координат центра масс изделий | 1984 |
|
SU1229619A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2027159C1 |
| Устройство для определения координат центра масс | 1986 |
|
SU1428966A1 |
| Поверочные весы | 1985 |
|
SU1302146A1 |
| СПОСОБ БАЛАНСИРОВКИ ИЗДЕЛИЯ | 2003 |
|
RU2245529C1 |
| Устройство для координатной разметкииздЕлий ОТНОСиТЕльНО иХ цЕНТРА Тя-жЕСТи | 1977 |
|
SU832374A1 |
I- :. Изобретение относится к мапшностроению, а именно к способам определения координат центра масс изделий.. Известен способ определения коорди нат центра масс изделия, заключающийся в том, что изделие устанавливают на качающийся центральной опоре стол с противовесом и по наклону стола от состояния равновесия судят о координатах центра масс изделия fl. Недостатком данного способа являет ся низкая точность .определения центра масс изделия, что объясн;яется наличием дополнительного момента, создаваемого противовесом стола. Наиболее близким по технической . сущности к предлагаемому является способ определения координат центра масс изделия, заклю 1аю1цийся в том, что изделие устанавливают на стол с центральной и боковыми опорами, и ограничительной скобой, уравновеши- . aaioT стол с изделием относительно центральной опоры установкой грузов на грузовые площадки стола и определяют координаты центра масс изделия 2, Недостатком известного способа является сравнительно низкая точность определения координат центра масс изделий, что объясняется наличием момента трения в центральной опоре, учесть который способ не позволяет. Цель изобретения - повьпоение точности .определения координат центра масс изделий. Поставленная цель достигается тем, что в способе определения координат центра масс изделия при уравновешивании стола с изделием на грузовую площадку устанавливают контроль ный груз с массой, , создающей момент, равный моменту трения в центральной опоре, установкой грузов добиваются такого положения, при котором боковая опора стола с изделием опирается на нижний упор ограничительной скобы, а при снятом грузе - на ее верхний упор.
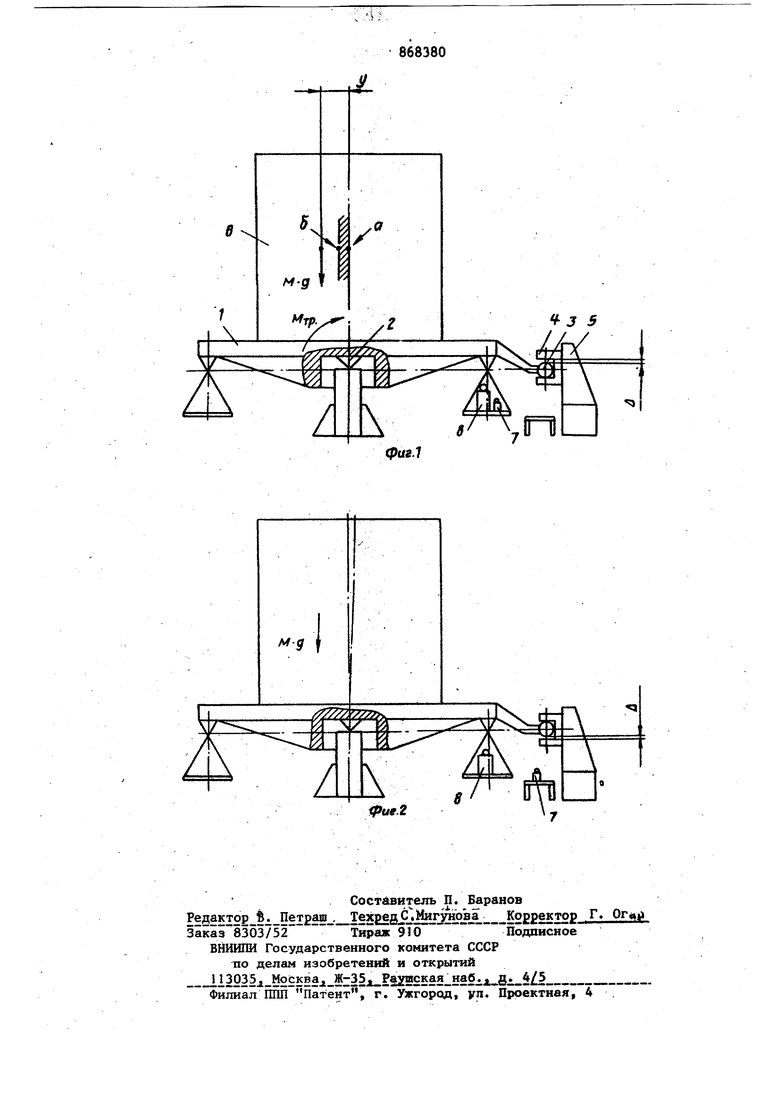
На фиг. 1 и 2 изображена конструктивная схема устройства, реализующего способ.
Устройство содержит стол 1 с центральной опорой 2 и двумя боковыми сферическими опорами 3, расположенн| 1ми в двух взаимно перпендикулярных плоскостях и опирающимися на упоры скобы 4 боковой опоры 5.
Способ осуществляется следукщим образом.
Изделие 6 устанавливают на стол. На грузовую площадку, расположенную со стороны боковой опоры, устанавливают контрольный груз 7, масса которого создает момент, равный моменту трения в центральной опоре. При наличии смещения центра масс изделия относительно его продольной оси возникает момент относительно центральной опоры стенда. При этом сферическая опора стола опирается в нижний или верхний упор скобы боковой опоры Для уравновешивания- изделия относительно центральной опоры устанавливают грузы 8 на грузовые площадки стола и добиваются такого положения, при котором стол стенда опирается сферической опорой в нижний упор скобы, а при снятии контрольного груза состояние равновесия нарушается, стол отклоняется от первоначального положения и упирается сферической опорой в верхний упор скобы. Аналогично уравновешивают изделие в другой плоскости.
После уравновешивания изделия по предлагаемому способу центр масс системы стол-изделие находится со стороны, противоположной боковой опоре, а величина смещения центра масс системы относительно центральной опоры при первоначальном положении стола огра ничена зоной действия момента трения в центральной опоре. При этом возможны два крайних положения центра масс системы, отмеченные на чертеже точками а и 5 , которьм соответствуют уравнения равновесия
М.д.у (m;,-i.m).g- L (1) M-g-y « lm2+mj).g.UM, (2) где М - масса изделия;
g - ускорение свободного падения;
у - координата j eHTpa масс изделия ;
л массы уравновешивающих ттузов;
m - масса контрольного груза, определяемая из условия
m ., g L а: м
ТР
М
момент трения в центральной
ТР опоре;
J. расстояние от грузовой площадки до центральной опоры. Таким образом, при измерении получают или истинное значение массы гирь или ошибаются на величину момента трения, но в одну сторону. Поскольку , то второе уравнение принимает вид
М-д -У (m,+2my).g.L Объединив первое и последнее уравнения в одно, можно получить измеряемое значение момента
МТР
М-д.у (iTi+1 , t
Tуменьшив в два раза погрешность, вносимую трением в результаты измерений Таким образом, предлагаемый способ позволяет повысить точность измерений.
Формула изобретения
Способ определения координат центра масс изделия, заключающийся в том что изделие устанавливают на стол с центральной и боковыми опорами и ограничительной скобой, уравновешивают стол с изделием относительно центральной опоры установкой грузов на грузовые площадки стола и определяют координаты центра масс изделия, отличающийся тем, что, с целью повьш1ения точности определения
координат центра масс, при уравновешивании стола с изделием на грузовую площадку устанавливают контрольный груз с массой, созданнцей момент, равный моменту Трения в центральной опоре, установкой грузов добиваются такого положения, при котором боковая опора стола с изделием опирается на нижний упор ограничительной скобы, а при снятом контрольном грузе - на ее верхний упор.
Источники информации, принятые во внимание при экспертизе
в
Ч-З 5
