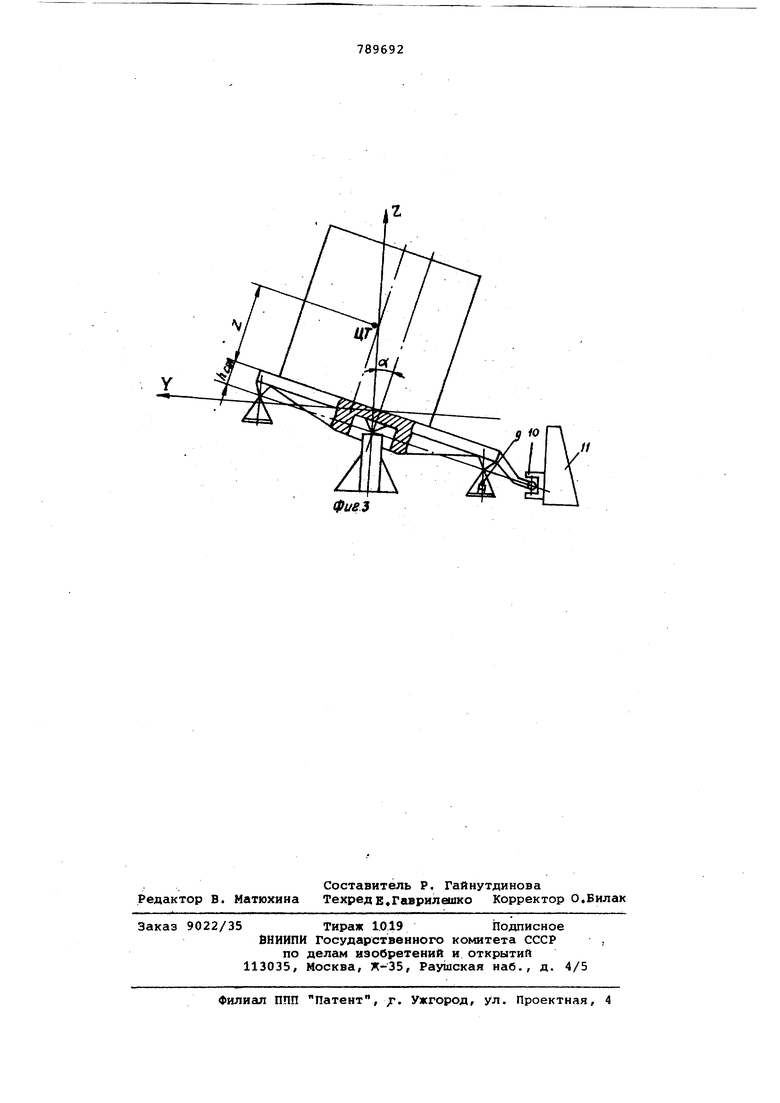
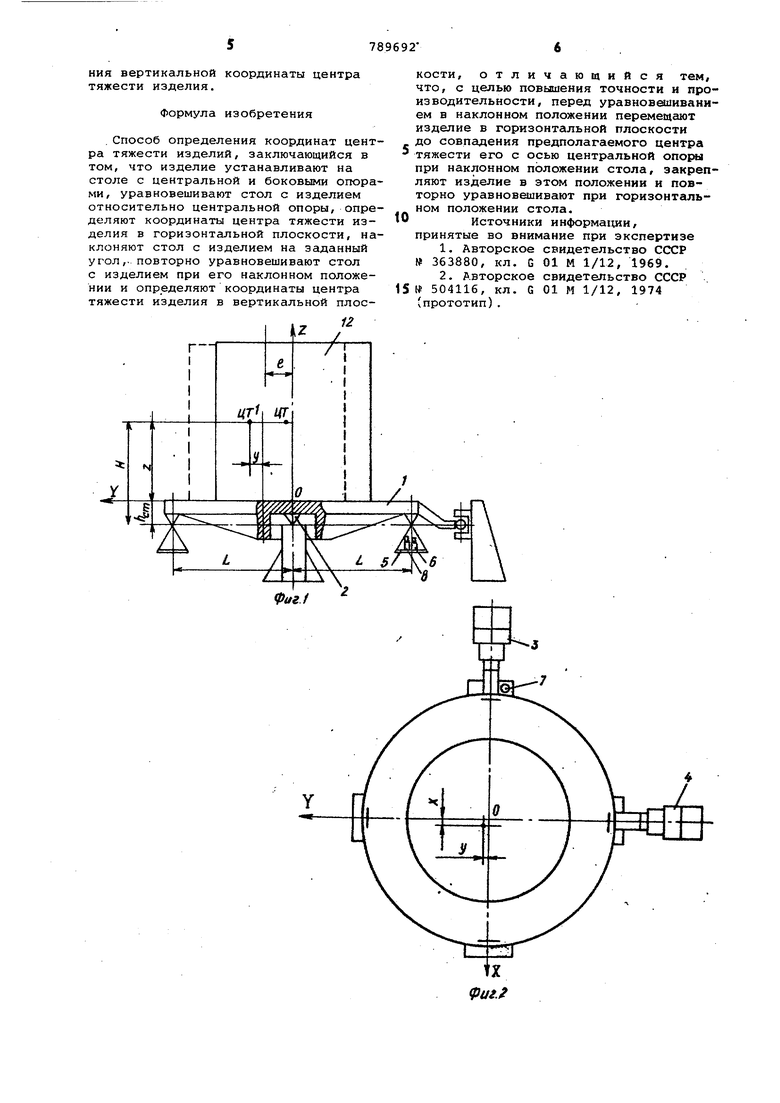
Изобретение относится к машиностроению и может быть использовано для определения трех координат центра масс и массы изделия. Известен способ определения координат центра тяжести изделий, заключ ющийся в том, что изделие устанавливают на столе с центральной и боковы ми опорами, уравновешивагот стол с изделием относительно центральной опоры в двух взаимно перпендикулярных плоскостях, перпендикулярных плоскости стола, установкой грузов на грузовые площадки стола, и определяют координаты центра тяжести изделия по значениям массы балансировочных грузов, расстояниям между грузами и центральной опорой и массы изделия Однако способ не позволяет определить три координаты центра масс изделия за одну установку, что снижа ет производительность. Наиболее близким по технической сущности к изобретению является способ определения координат центра тяжести изделий, заключающийся в том, что изделие устанавливают на стоп с центральной и боковыми опорами, ура новешивают стол с изделием относительно центральной опоры-в двух взаимно перпендикулярных длоскостях, перпендикулярных плоскости стола, установкой грузов на грузовые площадки стола определяют координаты центра тяжести изделия в горизонтальной плоскости, наклоняют стол с изделием на заданный угол, повторно уравновешивают стол с изделием при его наклонном положениии определяют координаты центра тяжести изделия в вертикальной плоскости Недостаток способа определения координат центра тяжести изделия необходимо предварительно определить массу изделия, что требует использования дополнительных устройств, снижая производительность процесса. Кроме того, точность определения вертикальной координаты центра тяжести изделия значительно ниже точности определения координат центра тяжести изделия в горизонтальной плоскости. Это объясняется тем, что ввиду зна-чительного расстояния центра тяжести изделия от оси качания центральной опоры при наклоне изделия на заданный угол центр тяжести изделия смещается относительно вертикальной оси центральной опоры на значительную величину, которая определяется из условия равновесия изделия относитель но центральной опоры при наклонном положении стола стенда. Чем больше смещение, тем большая масса грузов потребуется для уравновешивания изделия при наклонном положении стола. Погрешность от массы грузов при этом возрастает, увеличия погрешность определения величины смещения. Следовательно, чем большим будет значение вертикальной координаты, тем больше будет погрешность ее определения, а поскольку значение вертикальной координаты центра масс изделия значительно больше значений координат в горизонтальной плоскости, то- и погрешность определения вертикальной координаты будет значительно больше погрешностей определения координат центра тяжести изделий.в горизонтальной плоскости. Цель изобретения - повышение точности и производительности при определении координат центра тяжести изделий . Поставленная цель достигается тем что изделие перед уравновешиванием в наклонном положении перемещают в горизонтальной плоскости до совпадения предполагаемого центра тяжести его с осью центральной опоры при наклонном положении стола, закрепляют изделие в этом положении и повторно урав новешивгиот при горизонтальном положе.нии стола. На фиг. 1 схематически изображено уравновешивание стола с изделием в горизонтальной плоскости; на фиг. 2то же, вид сверху на фиг. 3 - уравиовешивание стола с изделием в наклонном положении. Устройство содержит стол 1 с опора ми центральной 2 и боковыми 3, 4, рас положенными в двух взаимно перпендикулярных плоскостях и имеющими грузовые площадки 5 для у становки на них уравновешивающих грузов 6-9. Для обеспечения наклонного положения сто ла 1 изделие содержит скобу 10, кото рая перемещается вдоль кронштейна 1.1 Способ определения координат цент ра тяжести изделий осуществляется следующим образом. Перед установкой изделия 12 на стол 1 стол балансируют относительно центральной опоры 2. После установки изделия на стол состояние равновесия нарушается, так как координаты его центра тяжести не совпадают с вертикальной осью центральной опоры 2. Уравновешивают стол с изделием относ тельно центральной опоры путем установки уравновешивающих грузов б 7 н грузовую площадку одной из боковых опор 4 или 3. Условия равновесия изделия относительно центральной опоры в плоскостях ZdY и ZOX .для определения координат центра тяжести изделия в горизонтальной плоскости можно записатьMg у пп g L , Mgfx , - масса изделия; g - ускорение свободного падения; и у - координаты центра тяжести изделия в горизонтальной плоскости; масса грузов 6 и 7; (П| и ITln расстояние между боковой и центральной опорами 3, 4 и После этого изделие перемещают в горизонтальной плоскости до совпадения предполагаемого центра тяжести его с осью центральной опоры при наклонном положении стола, и при наклоне стола с изделием на заданный угол oi в момент совпадения изделие закрепляют в этом положении. Затем производят уравновешивание стола с изделием при горизонтальном положении. Для этого на грузовую площадку одной из боковых опор устанавливают дополнительный груз 8. Условие равновесия при этом запишется так: Mg-Jy + е) - величина перемещения изделия относительно центральной опоры; mj - масса груза 8. После этого уравновешивают изделие при наклонном положении стола на грузовую площадку устанавливают груз 9. Условие равновесия при этом запишется так: Мо-ССВ + y)cosob-(hcr + Z)sinci«J m gLcoscA, где HCT высота от оси качания центральной опоры до опорной поверхности стола. Затем стол возвращают в горизонтальное положение и изделие снимают со стола. Решая систему четырех уравнений,, находят координаты центра тяжести изделия и массу изделия по формулам: . mx , , , mjU rn tgcst Наличие перемещений изделия относительно центральной опоры, повторное уравновешивание изделия при горизонтальном положении стола и уравновешивание изделия при наклонном положении стола после осуществления перемещения позволяет определить массу изделия и повысить точность определения вертикальной координаты центра тяжести изделия. формула изобретения ,Способ определения координат цент ра тяжести изделий, заключающийся в том, что изделие устанавливают на столе с центральной и боковыми опора ми, уравновешивают стол с изделием относительно центральной опоры, опре деляют координаты центра тяжести изделия в горизонтальной плоскости, на клоняют стол с изделием на заданный угол,- повторно уравновешивают стол с изделием при его наклонном положении и определяют координаты центра тяжести изделия в вертикальной плос2. кости, отличающийся тем, что, с целью повышения точности и производительности, перед уравновш1ивакием в наклонном положении перемещгиот изделие в горизонтальной плоскости до совпадения предполагаемого центра тяжести его с осью центральной опоры при наклонном положении стола, закрепляют изjEleлиe в этом положении и повторно уравноваиивают при горизонтальном положении стола. Источники информа1щи, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 363880, кл. G 01 М 1/12, 1969, 2.Авторское свидетельство СССР № 504116, кл, G 01 М 1/12, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения массы и трех координат центра масс изделия | 1983 |
|
SU1128127A1 |
| Способ определения координат центра масс изделия | 1980 |
|
SU868380A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2011 |
|
RU2476843C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2027159C1 |
| Устройство для определения координат центра масс изделия | 1987 |
|
SU1467409A1 |
| Устройство для определенияКООРдиНАТ цЕНТРА ТяжЕСТи издЕлий | 1977 |
|
SU813150A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА И КООРДИНАТ ЦЕНТРА | 1969 |
|
SU237416A1 |
| Устройство для определения координат центра масс изделий | 1984 |
|
SU1229619A1 |
| Способ определения погрешности стенда для измерения характеристик геометрии масс изделий и устройство для его осуществления | 2019 |
|
RU2722962C1 |
| СССР | 1973 |
|
SU363880A1 |