Изобретение относится к машиностроению, а именно к устройствам для определения массы и координат центра масс преимущественно крупногабаритных изделий.
Известно устройство для определения массы и положения центра масс изделия, содержащее стол с грузовыми площадками, имеющий призматическую центральную опору и боковую опору, ограничивающую наклон стола, снабженную домкратом для принудительного наклона стола (см. а.с. СССР №789692, кл. G01M 1/12, 1980 г.).
В результате анализа известного устройства необходимо отметить, что для него характерна сравнительная сложность его применения, обусловленная тем, что для определения массы изделия требуется операция смещения крупногабаритного изделия относительно центральной опоры.
Известно устройство для определения массы и трех координат центра масс изделия, содержащее основание с закрепленным на нем центральным домкратом и двумя боковыми опорами, расположенными в двух взаимно перпендикулярных направлениях. Внутри центрального домкрата помещен дополнительный домкрат, обеспечивающий поочередные подъем и опускание ответных частей центральной опоры и одной из дополнительных опор, которые закреплены на столе. Дополнительный домкрат выполнен в виде двух центральных стержней, установленных в цилиндрических направляющих и опирающихся на горизонтально расположенный диск, верхняя поверхность которого имеет уклон, а к нижней присоединен вал, приводящий диск во вращение. К столу подвешены четыре грузовые площадки. На столе закреплены уровни, установленные во взаимно перпендикулярных плоскостях.
(см. а.с. СССР №1128127, кл. G01M 1/12, 1984 г.) - наиболее близкий аналог.
При использовании данного устройства для определения массы изделия не требуется операции смещения крупногабаритного изделия относительно центральной опоры, а необходимое изменение расположения изделия и балансировочной опоры достигается применением в устройстве дополнительной опоры, смещенной от центральной опоры на необходимое расстояние.
Однако конструкция данного устройства является весьма сложной. Сложность обусловлена применением дополнительного домкрата, поочередно взаимодействующего с центральной и дополнительной опорами, что, кроме того, снижает точность измерений и увеличивает время их проведения.
Техническим результатом заявленного изобретения является упрощение конструкции, сокращение времени на проведение измерений и повышение точности измерений.
Указанный технический результат обеспечивается за счет того, что в устройстве для определения массы и положения центра масс изделия, содержащем стол с грузовыми площадками, имеющий центральную призматическую опору, дополнительную призматическую опору, размещенную в плоскости принудительного наклона стола, и боковую опору, кинематически связанную со столом и снабженную домкратом для принудительного наклона стола, новым является то, что центральная и дополнительная опоры выполнены в виде единого элемента с двумя параллельными призматическими опорными гранями, перпендикулярными плоскости наклона стола.
Отличием предлагаемого устройства от наиболее близкого аналога являются выполнение центральной и дополнительной опор как единого элемента с двумя параллельными призматическими опорными гранями, перпендикулярными плоскости наклона стола.
Благодаря такому выполнению опор предлагаемое устройство обладает сравнительно более простой конструкцией: не требуется применения дополнительного домкрата при сохранении технологических возможностей прототипа, включающих определение массы и координат центра масс различных крупногабаритных изделий, что, кроме того, снижает время на проведение измерений и повышает их точность.
Сущность заявленного изобретения поясняется графическими материалами, на которых:
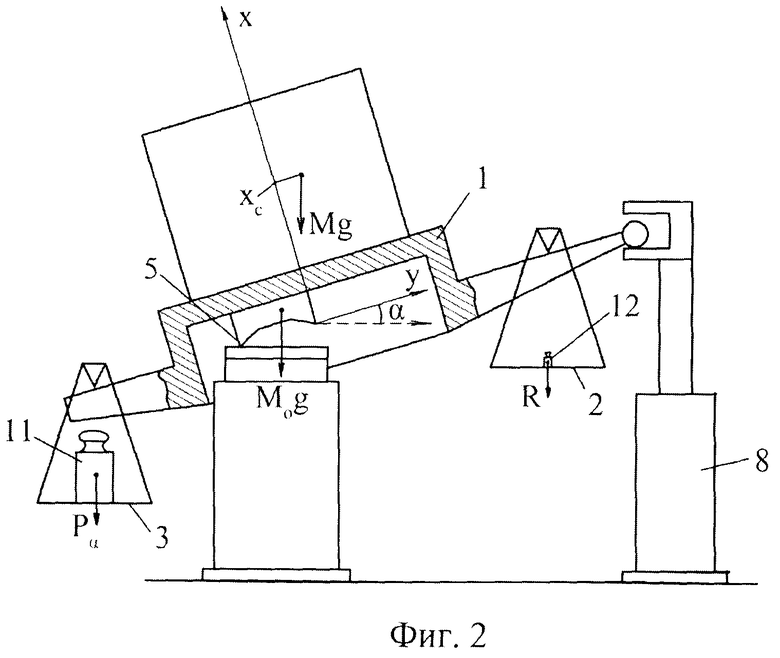
на фиг.1 - устройство, стол в горизонтальном положении;
на фиг.2 - устройство, стол в наклонном положении (при определении вертикальной координаты центра масс изделия).
Устройство для определения массы и положения центра масс изделия содержит стол 1 с грузовыми площадками 2 и 3, имеющий призматические центральную 4 и дополнительную 5 опоры, посредством которых стол 1 опирается на основание 6. Дополнительная опора 5 размещена в плоскости xOy принудительного наклона стола. Боковая опора 7, ограничивающая наклон стола 1, снабжена домкратом 8 для принудительного наклона стола. Центральная 4 и дополнительная 5 призматические опоры выполнены как единый элемент 9 с двумя параллельными призматическими опорными гранями (грани призм 4 и 5), перпендикулярными плоскости xOy наклона стола.
Устройство работает следующим образом.
Изделие 10 с неизвестной массой М устанавливают на стол 1 устройства, масса стола Mo. При этом суммарная масса стола с изделием равна Mo+М=МΣ. Стол 1 уравновешивается в горизонтальном положении на опоре 4 гирями 11 массой Р1, устанавливаемыми на грузовые площадки 2 или 3 (например, на площадку 3). Контроль уравновешенного состояния осуществляется контрольным грузом 12, величина R которого рассчитывается из условия равенства момента трения в центральной опоре 4 моменту, создаваемому контрольным грузом 12 на плече L по формуле R=fMΣg/L, где f - коэффициент трения качения для призматической опоры, g-ускорение свободного падения. В состоянии уравновешенности при установленном контрольном грузе 12 стол 1 остается в горизонтальном положении, а при снятии контрольного груза стол начинает движение по часовой стрелке вокруг опоры 3 (пока шаровая опора 13 не упрется в нижнюю часть скобы 7 боковой опоры). При этом дополнительная опора 5 приподнимается над основанием 6.
Далее стол 1 с изделием уравновешивается на дополнительной опоре 5 гирями 11 весом P2, устанавливаемыми на грузовую площадку 3. Расстояние между гранями центральной 4 и дополнительной 5 опор равно S. Контроль уравновешенного состояния осуществляется контрольным грузом 12, устанавливаемым на грузовую площадку 2. В состоянии уравновешенности при установленном контрольном грузе 12 стол 1 остается в горизонтальном положении, а при снятии контрольного груза стол начинает движение против часовой стрелки вокруг опоры 3 (пока шаровая опора 13 не упрется в верхнюю часть скобы 7 боковой опоры). При этом центральная опора 4 приподнимается над основанием 6.
После этого с помощью домкрата 8 стол 1 наклоняют на угол α и в этом положении уравновешивают на опоре 5 гирями 11 весом Рα, устанавливаемыми на грузовую площадку 3 (фиг.2). Контроль уравновешенного состояния осуществляется контрольным грузом 12, устанавливаемым на грузовую площадку 2. В состоянии уравновешенности при установленном контрольном грузе стол остается в положении, при котором шаровая опора 13 находится в контакте с нижней частью скобы 7 боковой опоры, а при снятии контрольного груза стол начинает движение против часовой стрелки вокруг опоры 3 (пока шаровая опора 13 не упрется в верхнюю часть скобы 7 боковой опоры).
Для учета массовых характеристик стола производится тарировка стола, заключающаяся в уравновешивании стола без изделия гирями массой P1o, P2o, Рαo в тех же положениях, в каких уравновешивается стол с изделием.
Масса и положение центра масс рассчитываются из следующих уравнений равновесия стола с изделием и стола без изделия:
P1L+RL+Mogyo-Mgyc=0
P2(L-S)+R(L-S)+Mog(yo+S)-Mg(yc+S)=0
Pα(L-S)cosα-R(L+S)cosα-Mog(S-yo+xotgα)cosα-Mg(yc+S-xctgα)cosα=0
PloL+RL+Mogyo=0
P2o(L-S)+R(L-S)+Mog(yo+S)=0
Pαo(L-S)cosα-R(L+S)cosα-Mog(S-yo+xotgα)cosα=0
где: yo - координата центра масс оснастки, yc - координата центра масс изделия.
Из приведенных уравнений масса М изделия определяется по формуле:
М=[(P2-P2o)(L-S)-(P1-P1o)L]/gS
После определения массы М изделия координата центра масс yc определяется по формуле:
yc=(P1-P1o)L/Mg
После определения координаты центра масс yc координата хс определяется по формуле:
xc=[(Pα-Pαo)(L-S)-Mg(yc+S)]/Mg·tgα
При необходимости определения координаты zc изделия, она определяется так же, как и в наиболее близком аналоге.
Таким образом, благодаря выполнению центральной и дополнительной опор как единого элемента с двумя параллельными призматическими опорными гранями, перпендикулярными плоскости наклона стола, устройство обладает сравнительно более простой конструкцией, так как в нем не требуется применения дополнительного домкрата при сохранении технологических возможностей прототипа, включающих определение массы и положения центра масс различных крупногабаритных изделий, что также сокращает время измерений и повышает их точность.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения массы и трех координат центра масс изделия | 1983 |
|
SU1128127A1 |
| Устройство для определения координат центра масс изделия | 1987 |
|
SU1467409A1 |
| Способ определения координат центра масс изделия | 1980 |
|
SU868380A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2579827C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2027159C1 |
| Устройство для определения координат центра масс изделия | 1990 |
|
SU1772635A1 |
| Устройство для определения координат центра масс изделий | 1984 |
|
SU1229619A1 |
| Способ определения координат центра тяжести изделий | 1978 |
|
SU789692A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2011 |
|
RU2458328C1 |
| Способ определения погрешности стенда для измерения характеристик геометрии масс изделий и устройство для его осуществления | 2019 |
|
RU2722962C1 |
Изобретение относится к машиностроению, а именно к устройствам для определения массы и координат центра масс преимущественно крупногабаритных изделий. Устройство для определения массы и положения центра масс изделия содержит стол с грузовыми площадками, имеющий центральную призматическую опору, дополнительную призматическую опору, размещенную в плоскости принудительного наклона стола, и боковую опору, кинематически связанную со столом и снабженную домкратом для принудительного наклона стола. Центральная и дополнительная опоры выполнены в виде единого элемента с двумя параллельными призматическими опорными гранями, перпендикулярными плоскости наклона стола. Технический результат заключается в упрощении конструкции, повышении точности измерений и сокращении времени на проведение измерений. 2 ил.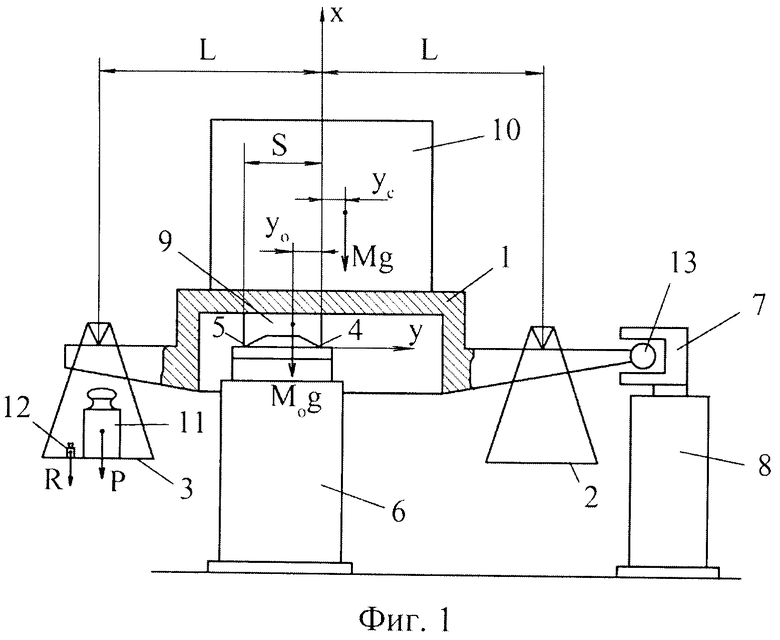
Устройство для определения массы и положения центра масс изделия, содержащее стол с грузовыми площадками, имеющий центральную призматическую опору, дополнительную призматическую опору, размещенную в плоскости принудительного наклона стола, и боковую опору, кинематически связанную со столом и снабженную домкратом для принудительного наклона стола, отличающееся тем, что центральная и дополнительная опоры выполнены в виде единого элемента с двумя параллельными призматическими опорными гранями, перпендикулярными плоскости наклона стола.
| Устройство для определения массы и трех координат центра масс изделия | 1983 |
|
SU1128127A1 |
| Способ определения координат центра тяжести изделий | 1978 |
|
SU789692A1 |
| Стенд для определения массы и координат центра масс изделий | 1981 |
|
SU1096508A1 |
| Стенд для определения моментов инерции и координат центра масс изделий | 1983 |
|
SU1097899A1 |

