(21)4095841/25-28
(22)18.07.86
(46) 07.10.88 Бкхп.37 (72) О.Н.Свирин, В.В.Крылов, П.П.Рыжков и В.Б.Бурыкин (53) 620.1.05:531.24(088.8)
(56)Авторское свидетельство СССР № 504116, кл. G 01 М 1/12, 1976. .
.(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАСС
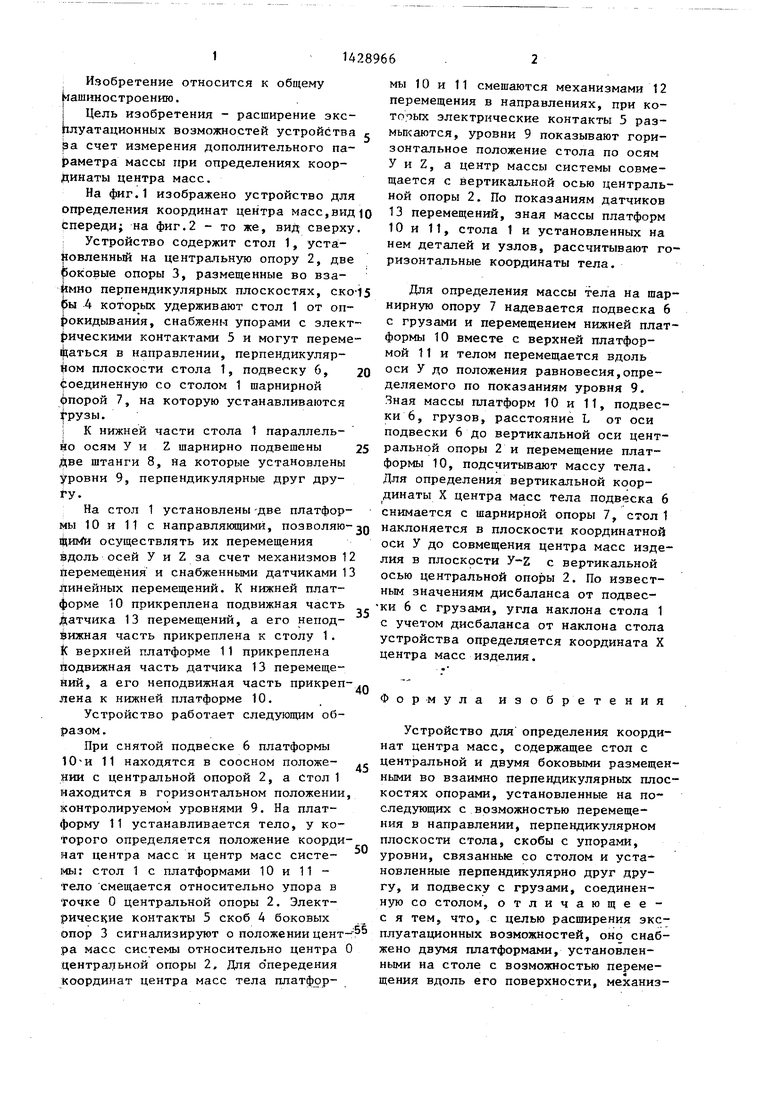
(57)Изобретение относитсй к общему машиностроению. Целью изобретения является расширение эксплуатационных возможностей устройства за счет измерения дополнительного параметра - массы тела, у которого определяют координаты центра масс. Устройство соетоит из стола 1, установленного на центральную опору 2 и на две боковые опоры, скобы 4 которых имеют электрические контакты 5 и могут перемещаться в направлении, перпендикулярном плоскости стола 1, две платформы 10 и 11, установленные на.стол с возможностью перемещения, датчики 13 и механизмы 12 перемещений, уровни и подвеску 6 с комплексом грузов. Координаты центра масс тела, установленного на платформу 11, определяются по перемещениям платформ 10 и 11 извет- ной массы, масса тела определяется за счет устранения дисбаланса от системы платформ 10, 11 со столом 1 и телом с грузом, устанавливаемым на подвеску 6. 2 ил.
(/
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЕРТИКАЛЬНОЙ ДИНАМИЧЕСКОЙ БАЛАНСИРОВКИ ИЗДЕЛИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2539810C1 |
| СССР | 1973 |
|
SU363880A1 |
| Способ определения координат центра тяжести изделий | 1978 |
|
SU789692A1 |
| Устройство для определения координат центра масс изделия | 1990 |
|
SU1772635A1 |
| Устройство для определения координат центра масс изделий | 1984 |
|
SU1229619A1 |
| СПОСОБ БАЛАНСИРОВКИ ИЗДЕЛИЯ | 2003 |
|
RU2245529C1 |
| Устройство для определения массы и трех координат центра масс изделия | 1983 |
|
SU1128127A1 |
| СПОСОБ ПЕРЕМЕЩЕНИЯ МОБИЛЬНОГО РОБОТА НА СКЛАДЕ | 2019 |
|
RU2748441C2 |
| Вибростенд | 1974 |
|
SU682782A1 |
| Способ определения погрешности стенда для измерения характеристик геометрии масс изделий и устройство для его осуществления | 2019 |
|
RU2722962C1 |
1 6 1 10 If -2
А V-IЛ .
.г.1
Изобретение относится к Кгашиностроениго.
I Цель изобретения - расширение экс- Ьлуатационных возможностей устройства а счет измерения дополнительного параметра массы при определениях координаты центра масс.
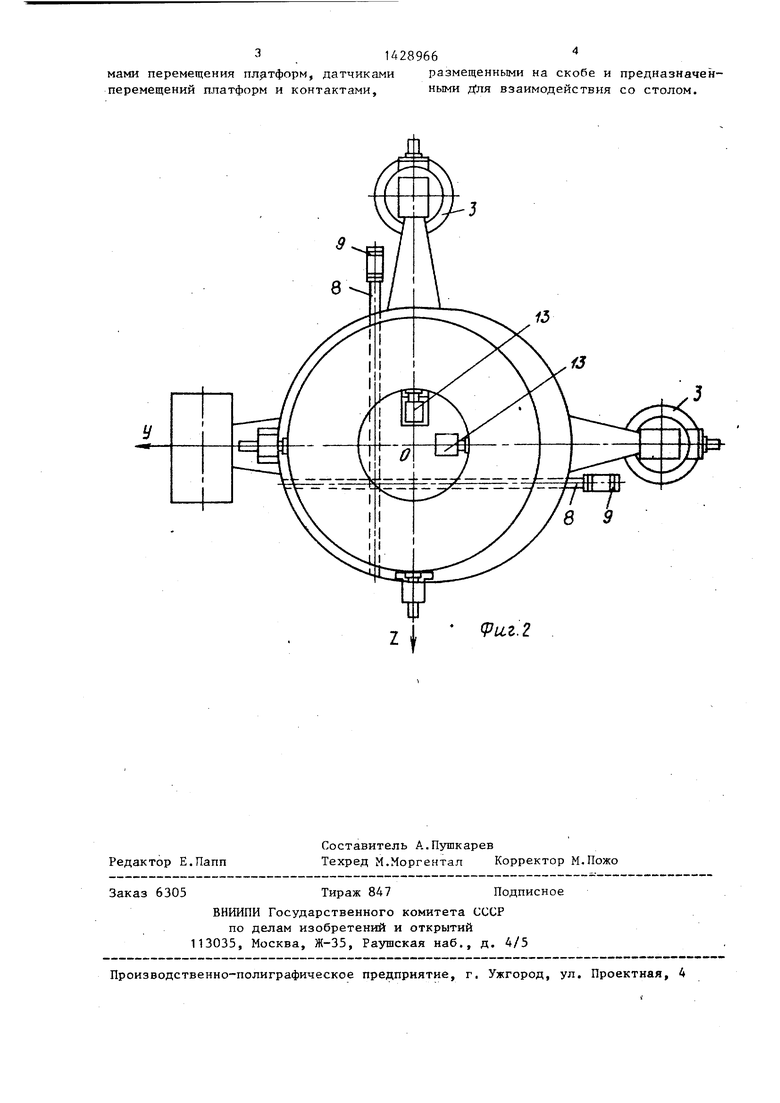
На фиг.1 изображено устройство для определения координат центра масс,вид спереди; на фиг.2 - то же, вид сверху ; Устройство содержит стол 1, уста- овленный на центрааьную опору 2, две боковые опоры 3, размещенные во вза- Имно перпендикулярных плоскостях, ско бы 4 которьт удерживают стол 1 от опрокидывания, снабженн упорами с электрическими контактами 5 и могут переме || аться в направлении, перпендикуляр- Йом плоскости стола 1, подвеску 6, |;оединенную со столом 1 шарнирной фпорой 7, на которую устанавливаются грузы.
i К нижней части стола 1 параллельно осям У и Z шарнирно подвешены две штанги 8, на которые установлены уровни 9, перпендикулярные друг друt-y.
На стол 1 установлены -две платформы 10 и 11 с направлякнцими, позволяю1ЙиМи осуществлять их перемещения вдоль осей У и Z за счет механизмов 12 йеремещения и снабженными датчиками 13 линейных перемещений. К нижней платформе 10 прикреплена подвижная часть J(з:aтчикa 13 перемещений, а его неподвижная часть прикреплена к столу 1. k верхней платформе 11 прикреплена подвижная часть датчика 13 перемещений, а его неподвижная часть прикреплена к нижней платформе 10.
Устройство работает следующим образом.
При снятой подвеске 6 платформы 10 и 11 находятся в соосном положе- НИИ с центральной опорой 2, а Стол 1 находится в горизонтальном положении, контролируемом уровнями 9. На платформу 11 устанавливается тело, у которого определяется положение координат центра масс и центр масс систе- №i: стол 1 с платформами 10 и 11 - тело смещается относительно упора в Точке О центральной опоры 2. Электрические контакты 5 скоб 4 боковых опор 3 сигнализируют о положении цент ра масс системы относительно центра О центральной опоры 2, Для о передения координат центра масс тела платфор
мы 10 и 11 смешаются механизмами 12 перемещения в направлениях, при ко- топых электрические контакты 5 размыкаются, уровни 9 показывают горизонтальное положение стола по осям У и Z, а центр массы системы совмещается с вертикальной осью центральной опоры 2. По показаниям датчиков 13 перемещений, зная массы платформ 10 и 11, стола 1 и установленных на нем деталей и узлов, рассчитывают горизонтальные координаты тела.
Для определения массы тела на шарнирную опору 7 надевается подвеска 6 с грузами и перемещением нижней платформы 10 вместе с верхней платформой 11 и телом перемещается вдоль оси У до положения равновесия,определяемого по показаниям уровня 9. Яная массы платформ 10 и 11, подвески 6, грузов, расстояние L от оси подвески 6 до вертикальной оси центральной опоры 2 и перемещение платформы 10, подсчитывают массу тела. Для определения вертикальной ксэор- динаты X центра масс тела подвеска 6 снимается с шарнирной опоры 7, стол 1 наклоняется в плоскости координатной оси У до совмещения центра масс изделия в плоскости y-Z с вертикальной осью центральной опоры 2. По известным значениям дисбаланса от подвес- ки 6 с грузами, угла наклона стола 1 с учетом дисбаланса от наклона стола устройства определяется координата X центра масс изделия.
Формула изобретения
Устройство для определения координат центра масс, содержащее стол с центральной и двумя боковыми размещенными во взаимно перпендикулярных плоскостях опорами, установленные на по следующих с возможностью перемещения в направлении, перпендикулярном плоскости стола, скобы с упорами, уровни, связанные со столом и установленные перпендикулярно друг другу, и подвеску с грузами, соединенную со столом, отличающее- с я тем, что, с целью расширения эксплуатационных возможностей, оно снабжено двумя платформами, установленными на столе с возможностью перемещения вдоль его поверхности, механизперемещений платформ и контактами.
ными д ля взаимодействия со столом.
9и,г.2
