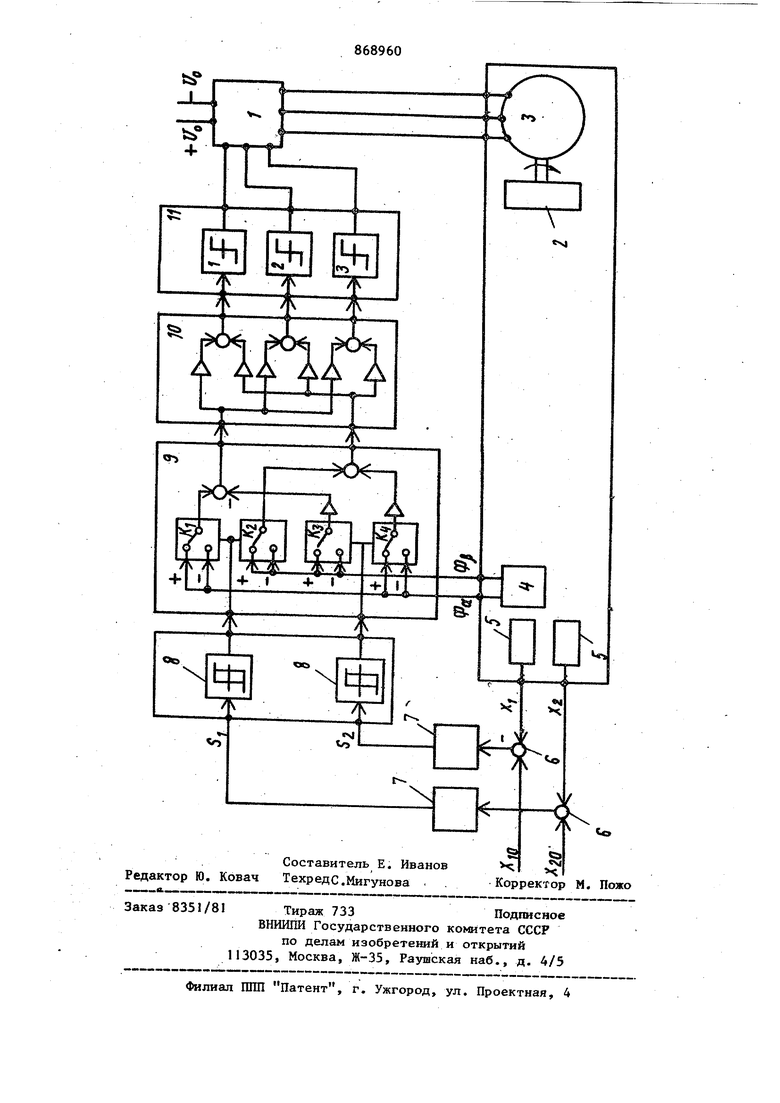
Изобретение относится к электротехнике и может быть использованов в управляемом электроприводе на 6ase короткозамкнутого асинхронного двига теля, применяемого в отраслях народного хозяйства, где требуется высока точность воспроизведения заданных па раметров управления. Известны устройства для управлени асинхронным двигателем, содержащие к ординатный преобразователь, связанКный через узлы с релейными характеристиками с преобразователем энергии на ключевых элементах, который подклю чен к обмоткам асинхронного двигателя Dn. Эти устройства обеспечивают высо- кую точность управления параметрами асинхронного двигателя, но являются сложными в реализации из-за наличия электромеханических узлов. Наиболее близким к предлагаемому по технической сущности является устройство для управления асинхронным . двигателем, содержащее два формирователя сигнала линейной комбинации ошибки управления и ее производных, датчик фазных составляющих потокосцеплений ротора, подключенный к первой группе входов координатного преобразователя, выход которого связан через преобразователь числа фаз и блок формирователей релейных сигналов со входом преобразователя энергии на ключевых элементах, выход которого связан с обмотками статора асинхронного двигателя . Это устройство может обеспечивать высокую точность управления, однако на эту точность в значительной меревлияет нестабильность параметров отдельных узлов устройства и на практике реализовать высокую точность регулирования не удается. Цель изобретения - повышение точности регулирования скорости вращения асинхронного двигателя. Указанная цель достигается тем, что в устройство введены два узла с нелинейными характеристиками типа гистерезис, вход каждого из которых подключен к выходу одного из фор мирователей сигнала комбинации ошибки управления и ее производных, а выходы подключены ко второй группе входов координатного преобразователя На чертеже приведена блок-схема предлагаемого устройства. Устройство содержит преобразователь 1 энергии на. ключевых элементах коммутирующий напряжение постоянного тока с величиной Uj. Нагрузка 2 установлена на валу асинхронного двигателя 3, который подключен к выходу преобразователя I. энергии. С асинхронным двигателем 3 связаны датчик 4 текущих фазных составляющих потокосцеплений ротора и датчики 5 истинных значений регулируемых параметров х и х, Например ско рости и величины потокосцепления ротора двигателя. Выходы датчиков 5 подключены к узлам 6 сравнения задан ных, параметров управления х и х с параметрами Xv и Хл. Выходы узлов 6 подключены ко входам формирователей 7 сигналов комбинаций S и S ошибок управления и их производных. Входы узлов 8 с нелинейными характеристиками типа гистерезис подключены к выходам формирователей 7, а их выходы связаны со входами координатного преобразователя 9, выход которого через преобразователь 10 числа фаз связан со входом блока 11 формирователей релейных сигналов. Устройство работает следующим образом. Регулируемые параметры х и х о, измеренные датчиками 5, сравниваются в узлах 6 с сигналами задания х и Хпл. Результаты сравнения (ошибки уп равления) поступают в формирователи, которые формируют сигналы 5 и SQ в виде линейных комбинаций опибок управления и их производных. Узлы 8 формируют из сигналов S и Злсигналы, совпадаюшле по знаку с сигналами 5. и Sn и постоянные по величине.. Формирование этих сигналов пр1рисходит в соответствии с характеристиками типа гистерезис узлов 8. Выходные сигналы узлов 8 поступаю на входы координатного преобразователя 9, на другие входы которого поступают сигналы Фг( и Ф л от датчика 4 составляющих потокосцеплений ротора. Координатный преобразователь содержит четыре ключа К , К ,, Кп и К (по числу требуемых для координатного преобразования блоков умножения) и два сумматора. Сигналы, от датчика 4 поступают иа сигнальные входы ключей , а сигналы от узлов 8 - на управляющие входы этих ключей, что обеспечивает модуляцию этих сигналов сигналами Фз. игиэлы на выходах координатного преобразователя 9 содержат информацию о требуемой частоте напряжения статора двигателя 3, о величинах сигналов ф(и о линейных комбинациях S. и SQ. Сигналы с выхода координатного преобразователя 9 преобразуются в многофазные сигналы с требуемым для двигателя числом фаз с помощью блока 10, выходные сигналы которого поступают на блок 11 формирователей релейных сигналов . Блок 11 вырабатывает релейные сигналы управления ключами преобразователя 1 энергии, ко10рый питает двигатель 3 широтно модулированньиу напряжением с величиной UQ, Использование в предлагаемом устройстве усилителя напряжения на ключевых элементах и,узлов снелинейными (релейными) характеристиками позволяет рассматривать это устройство как систему управления с переменной структурой и производить выбор коэффициентов отдельных узлов и расчет устройства в целом на основе известной теории систем управления с переменной структурой. Согласно этой -теории в предлагаемом устройстве возникают скользящие режимы - сигналы S и $л равны нулю. В этих режимах изменение во времени фактических значений регулируемых параметров, например скорости, не зависит от параметров асинхронной машины и отдельных блоков устройства управления, а определяется изменением во времени заданий на регулируемые параметры, а также коэффициентами, принятыми в линейных комбинациях ошибок управления и их производных. Таким образом, удается обеспечить высокую точность управления параметраьш двигателя, например скоростью, определяемую в основном точностью датчиков фактических значений регулируемых параметрол.
Формула изобретения
Устройство для управления асинхронным электродвигателем, содержащее два формирователя сигнала линейной комбинации ошибки управления и её производных, датчик фазных составляющих потокосцеплений ротора, подключенный к первой группе входов координатного преобразователя, выход которого связан через преобразователь числа фаз и блок формирователей релейных сигналов со входом преобразователя энергии на ключевых элементах, выход которого связан с обмотками статора асинхронного электродвигателя, отличающееся тем, что, с целью повышения точности регулирования скорости вращения,, в устройство введены два узла с нелинейными характеристиками типа гистерезис, вход каждого, из которых подключен к выходу одного из формирователей сигнала комбинации ошибки управления и ее производных, а выходы подключены ко второй группе входов координатного преобразователя.
Источники информации, принятые во внимание при экспертизе
1.Бродовский В.Н. и др. Приводы с частотно-токовым управлением. М., Энергия, 1974, с. 25-40.
2.Патент ФРГ 1941312, кл. 21 С 59/36, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электродвигателем переменного тока в следящем режиме | 1980 |
|
SU944047A1 |
| Электропривод переменного тока | 1988 |
|
SU1534737A1 |
| Частотно-управляемый электропривод | 1987 |
|
SU1453576A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2382334C1 |
| СПОСОБ СТАБИЛИЗАЦИИ МОМЕНТА ВРАЩЕНИЯ СИЛОВЫХ ГИРОСТАБИЛИЗАТОРОВ | 2008 |
|
RU2385530C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |
| Частотно-регулируемый асинхронный электропривод | 1985 |
|
SU1282302A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1365335A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1985 |
|
SU1283929A1 |