t1283929
Изобретение относится к электроехнике и может быть использовано в егулируемом асинхронном электроприоде общепромышленного назначения.
Цель изобретения - попышение точости регулирования частоты вращения вигателя путем повьшения точности пределения координат.
На фиг.1 представлена структурная хема устройства определения коорди
.- fO
ды щи ч п ср и на ны бл в гто и в к щ н к и n ля кл те по р ка с с/ го с. А I .o ио
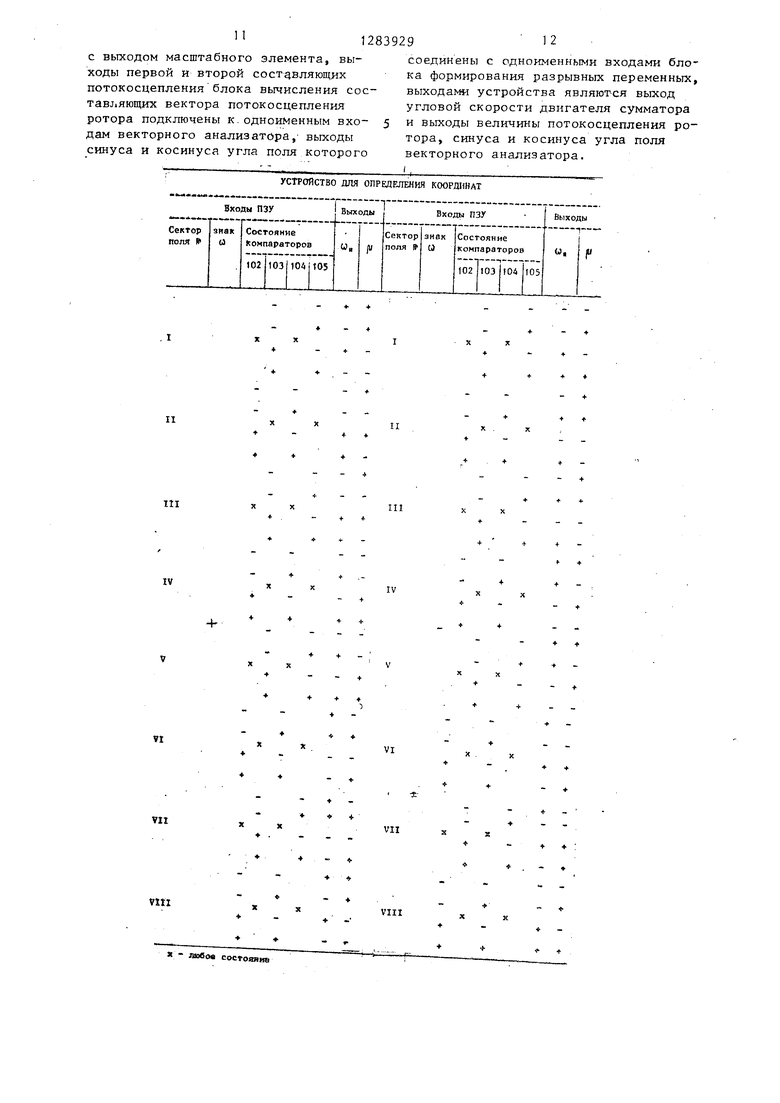
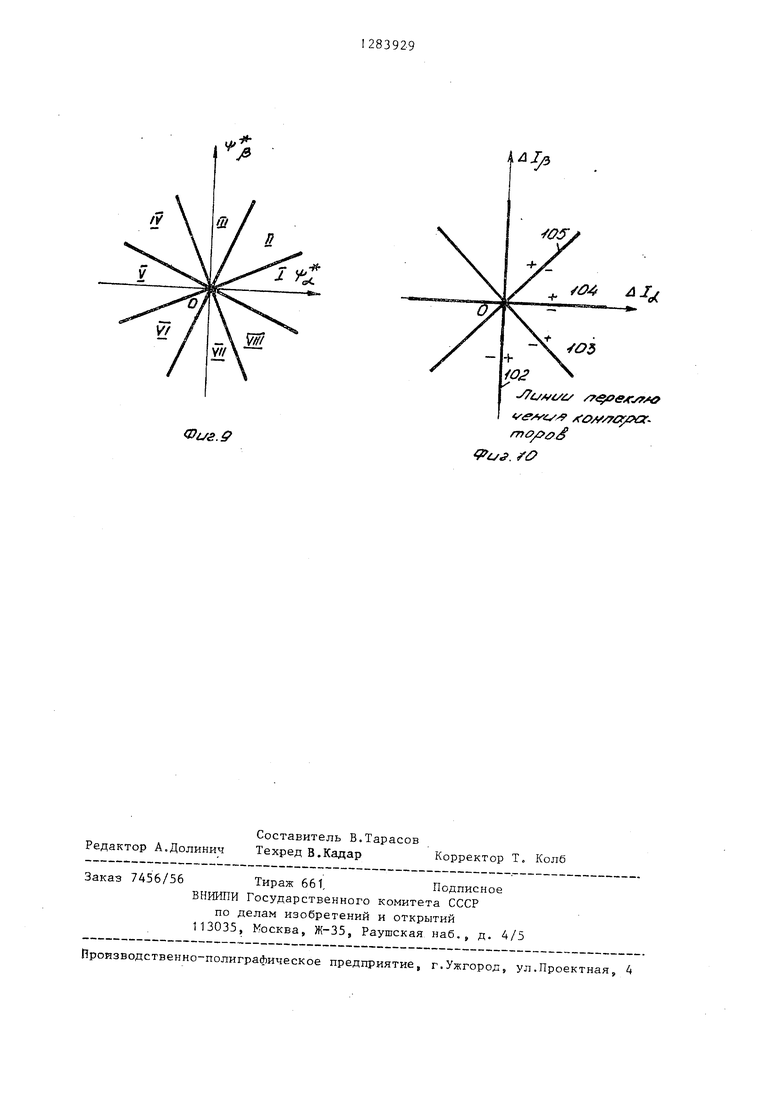
ват; на фиг.2 - развернутая структурная схема блока вычисления составляющих вектора потокосцепления -ротора; на фиг.3 - развернутая структурная схема вычисления составляющих вектор тска статора; на фиг.4 и 5 - развернутые структурные схемы двух вариантов выполнения блока формирова 1ия разрывных переменных; на фиг,6 - упрощенная принципиальная электрическая схема формирователя кода цифровой составляющей скорости; на фиг.7- принципиальная электрическая схема преобразователя фазных составляющих напряжения в прямоугольнь е; на фиг. 8 упрощенная принципиальная электрическая схема векторного анализатора; на фиг.9 - определяемые секторы угла поля; на фиг.10 - секторы вектора разности измеренного и вычисленного токов в неподвижных прямоугольных координатах.
Устройство по фиг.1 содер мт датчики 1 фазных токов, подключенные к преобразователю 2 фазных составляющих тока в прямоугольные, датчики 3 фазных напряжений; подключенные к преобразователю 4 фазных составляющих напряжения в прямоугольные, два элемента 5 и 6 сравнения, блок 7 вычисления составляющих вектора тока статора, блок 8 вычисления составляющих вектора потокосцепления ротора, блок 9 формироза йия разрывных переменных, векторньш анализатор 10 формирователь 11 кода цифровой состав-: ляющей скорости, масщтабный элемент 12, сумматор 13,
Причем выходы 14 и 15 первой и второй составляющих измеренного то- . ка преобразователя 2 соединены с одноименными входами 16э17 блока 8j а также с неинвертирующими входами 18 19 первого и второго элементов 5 и 6 сравнения соответственно. Выходы 20, 21 первой и второй составляющих потокосцепления блока 8 соединены с одноименными входами 22,23 блока 7. Выхо
fO
J5
20
а
30
35
40
2
ды 24 и 25 первой и второй составляющих ьычислеииого тока блока 7 подключены к инвертирующим входам 26 и 27 первого и второго элементов 5 и 6 сравнения соответственно. Выходь; 28 и 29 первой н второй составляющих напряжения преобразователя 4 соедине ны с одноименнь ми входами 30 и 31 блока 7. Выходы 32, 33 первого и . второго элементов 5 и б срявнения гтодклю-чень; к входам 34,35 разности измеренной и вычисленной первой и второй составляющих вектора тока блока 9. Выход 36 разрывной составляющей скорости блока 9 подключен к одноименному входу 37 блока 8 а также к входу 38 масштабного элемента 12 и входу 39 формирователя 1 i ., Выход 40 фикти1зной переметши блока 9 coejjH- neii с одпои енн11М входоь; 41 блока 7. Входы 42 и 43 первой и кторой составляющих измеренного тока блока 7 подключены к выходам 14., 15 преобразова-. теля 2. 44 формитнзвателя 1 1 подключен к входам 45.46.47 и 48 цифровой скорости блока 9„ блока 8, блока 7 и сумматора 13 гостветственко. Другой вход 49 cy r aтopa 13 соединен с вь ходом 50 масштабного элемента 1.. ВЬ|ХОД Ь 20 и 21 блока 8 подключены к с/гноименным входам 51 и 52 зскторно- го анализатора 10. 53 Р. 54 с. Аиуса и косинуса угла поля зектор- I .oro анализатор; 10 соединены с од- иор меняыми входами 55 л 56 блока 9.
Bыxoдa ;и устройстЕ;а ЯБЛЛРОТСЯ: 55 - угловой скорости двигателя 56, сумматора 13; а таклсс 57,53554 соот- петственно } еличи; ы 1;отокосцеплеиия ротора, синуса и косинуса угла поля векторного анализатора 10.
0
5
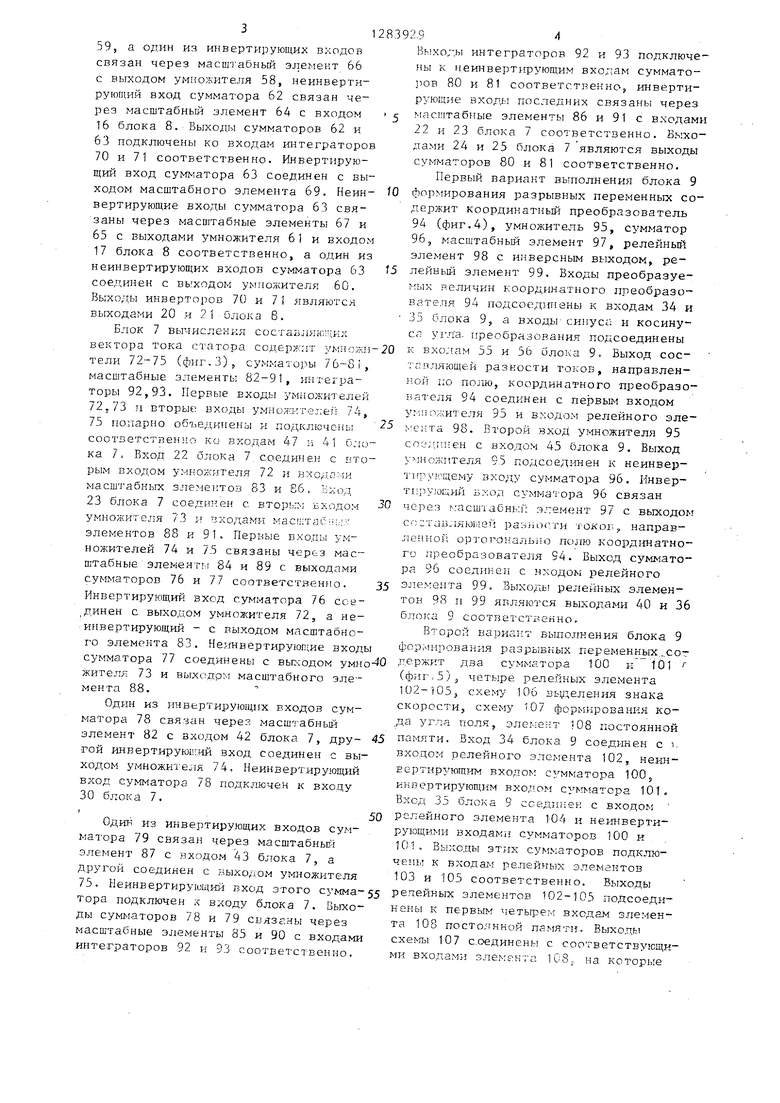
торы 62,63; маси;тпбиыс элементы 64- 69, интегратот:ы 70 if .
Первые входы умпож этелей 58 и 59 и : зход масштабного элемента 69 соединены с выходом интегратора 71„ а выход интегратора 70 соединен с входами масштабнсг о элемента 68 и первыми входами з множ-ителей 60 я 61. Вторые входь умножи елей 58,61 и 59, 60 объединены попарно и ;7одключе;- Ы соответствепне к входам 37 и 46 блока 8. Инвертирующие входы суччматора 62 присоединены к выходу масштабно™ г о элемента 68, к выходу умиожг- теля
59, a один из инвертирующих входов связан через масштабный элемент 66 с выходом умножителя 58, неинверти- руюошй вход сумматора 62 связан через масштабньй элемент 64 с входом
16блока 8. Выходы сумматоров 62 и 63 подключены ко входам HiiTerpaTopO 70 и 71 соответственно. Инвертирующий вход сумматора 63 соединен с выходом масштабного элемента 69. Неинвертирующие входы сумматора 63 связаны через масштабные элементы 67 и 65 с выходами умножителя 61 и входо
17блока 8 соответственно, а один и неинвертирующих входов сумматора 63 соединен с выходом умножителя 60. Выходы инверторов 70 и 71 являются выходами 20 и 21 блока 6.
Блок 7 вычисления составляюпгил вектора тока статора содержит умипж тели 72-75 (фиг.З), сумматоры 76-8i масштабные элементы 82-91, интеграторы 92,93. Первые входы умножителе 72,72 и вторые входы умно.та-:те. 74 75 попарно об ):)единены и подключены соответственно ко входам 47 li 41 o.-u ка 7. Вход 22 блока 7 соединен с втрым входом умножителя 72 и входп-- и масштабных элементов 83 и 86. lixoA 23 блока 7 соединен с вторым БХОДОМ умножителя 73 i входами масштабм;;:- элементов 88 и 91. Первые входы умножителей 74 и 75 связаны через масштабные элемент, 84 и 89 с выходами сумматоров 76 и 77 соответственно. Инвертирующий вход сут- матора 76 сое динен с выходом умножителя 72, а неинвертирующий - с выходом масштабного элемента 83, Не;-швертирую11 ие вхо сумматора 77 соединены с вькодом ум жителл 73 и выходом масштабного элемента 88.
Один из инвертируюш;их входов сумматора 78 связан через масштабньй элемент 82 с входом 42 блока 7, дру гой инвертируюиида вход соединен с входом умножителя 74, Неинвертирующий вход сумматора 78 подключен к входу 30 блока 7.
Одш- из инвертирующих входов сумматора 79 связан через масштабньй элемент 87 с входом 43 блока 7, а другой соединен с выходом умножителя
50 релейного элемента 104 и неинвертирующими входами сумматоров 100 и 101, Выходы этих сумматоров подключены к входа - релейных элемантов 103 и 105 соответственно. Выходы
75. Неинвертирующий вход этого сумма-55релейных элементов 102-105 подсоедитора подключен ; входу блока 7. Выхо-иены к первым четырем входам элеменды сумматоров 78 и 79 связаны черезта 108 постоянной памяти. Выходы
масш табные элементы 85 и 90 с входамисхемы 107 с.оединены с соответствующиинтеграторов 92 и 93 соответственно.ми входами злемента 108, на которые
JO
15
20 5 - 3035 О держит
28392.9
Выходы интеграторов 92 и 93 подключены к неинвертирующим входам сумматоров 80 и 81 соответственно, инверти- рз. ющие входы последних связаны через масштабные элементы 86 и 91 с входами 22 и 23 блока 7 соответственно. Выходами 24 и 25 блока 7 являются выходы сумматоров 80 и 81 соответственно.
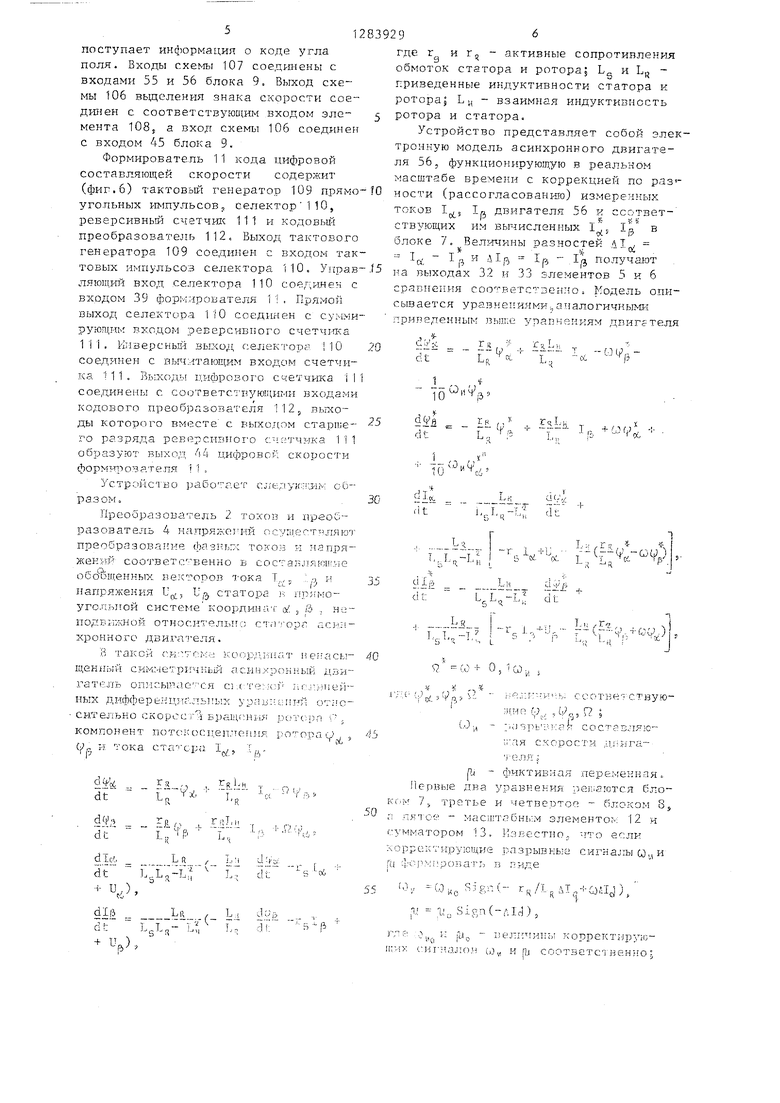
Первый вариант выполнения блока 9 формирования разрывных переменных содержит координатный преобразователь 94 (фиг.4), умножитель 95, сумматор 96, масштабный элемент 97, релейный элемент 98 с инверсным выходом, ре- лейньш элемент 99. Входы преобразуемых величин координатного преобразователя 94 подсоединены к входам 34 и 35 блока 9, а входы синуса и косинуса угл а. преобразования подсоединены к Bxo;iaM 55 и 56 блока 9. Выход сос- Тс ;,пляюп.1ей разности токов, направлен- JiOH по подда, координатного -преобраэо- нателя 94 соединен с первым входом умножителя 95 и входом релейного эле- i- cirra 98. Второй вход умножителя 95 со: ;ап;ен с входом 45 блока 9. Выход умножителя 95 подсоединен к неинвер- тируюцему входу сумматора 96. Ннвер- Т1;15у 0 1; 1Й вход сумматора 96 связан через г-;асштабнь:Гг элемент 97 с выходом С г;ставляю1 1е1 разиос.ти токол, направ- леп.ноГ; ортогонально полю коорд1татно- го преобразователя 94. Выход сумматоержит
ра 96 соединен с входом релейного
держит
элемента 99. Выходы релейных злемен- тон 98 и 99 являются выходами 40 и 36 блока 9 соответственно.
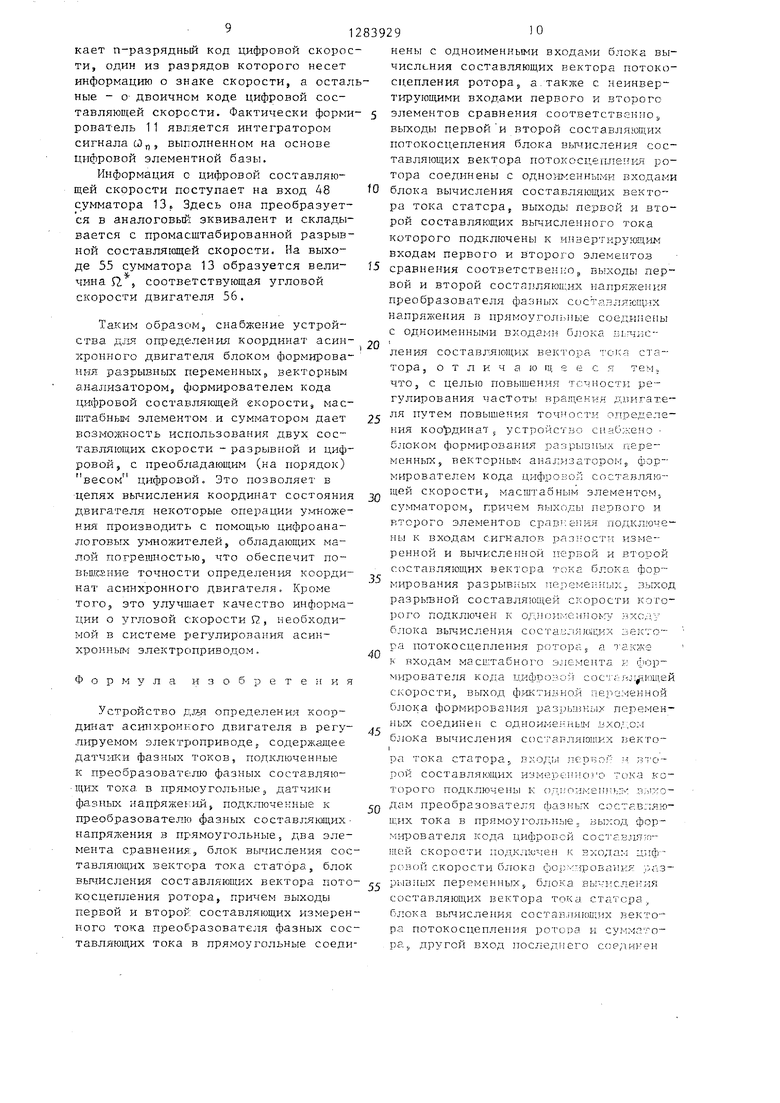
Второй вариант выполнения блока 9 формирования разрывных переменн 1х сот два сумматора 100 и 101 (фиг,5), четыре релейных элемента 102-105, 106 вьщеления знака скорости, схему 107 форьшрованкя ко- ,да угла поля, элемент 108 постоянной памяти. Вход 34 блока 9 соединен с ь входом релейного элемента 102, неин- вертирующим вxoдo ; сумматора 100j инвертирующим входом cyм aтopa 101, Вход 35 блока 9 соединен с входо.
50 релейного элемента 104 и неинвертирующими входами сумматоров 100 и 101, Выходы этих сумматоров подключены к входа - релейных элемантов 103 и 105 соответственно. Выходы
55релейных элементов 102-105 подсоедипоступает информация о коде угла поля. Входы схемы 107 соедш-гены с входами 55 и 56 блока 9, Выход схе мы 106 выделения знака скорости сое- с соответствуюидам входом элемента lOSj а вход схемы 106 соединен с входом 45 блока 9.
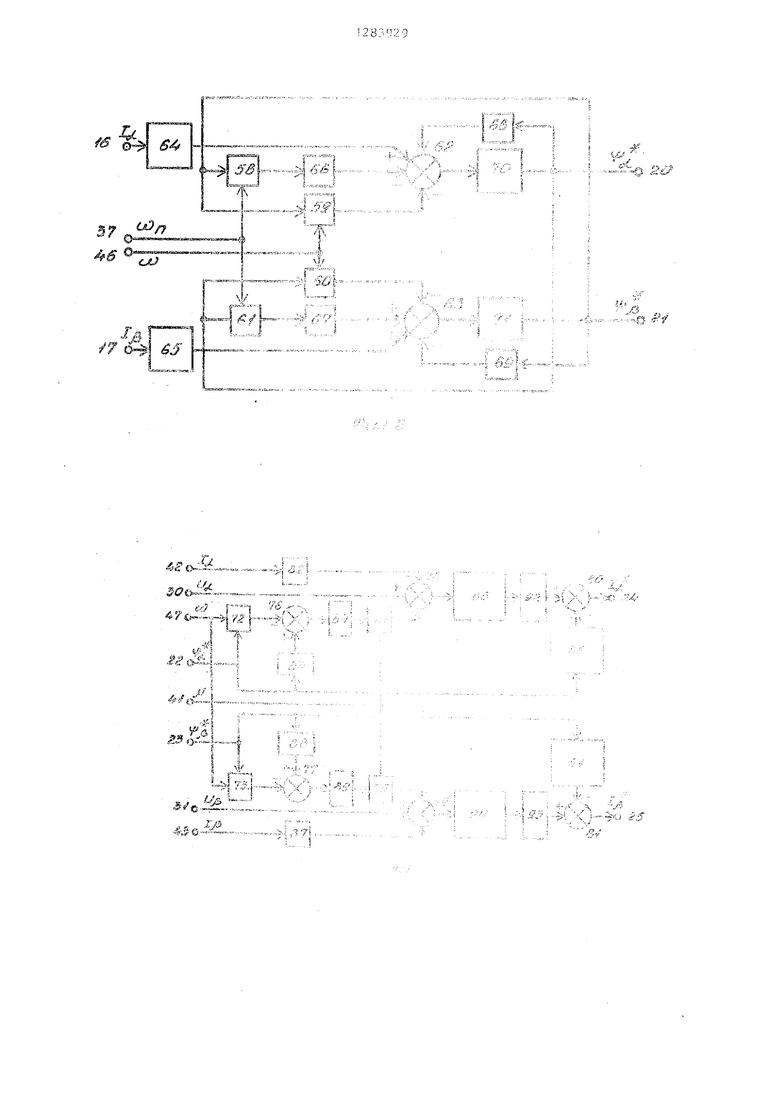
Формирователь 11 кода цифровой составляющей скорости содержит
(фиг.6) тактовый генератор 109 пpя 20-10 ности (рассогласованшо) измеренных
угольных импульсовJ селектор 110, реверсивный счетчик; 111 и кодовый преобразователь 112. Выход тактового генератора 109 соединен с входом так
токов 1, ствующих блоке 7
1, - i: и
товых импульсов селектора 110. Угграв-,15 , выходах 32
1д двигателя 56 к ( .
им вычисленных i,,. JL
Вел ;1чины оазностей AT., - т сответ««
1д В
ilcj IP if}, получают
и 33 элементов 5 к 6 сравнения соо : ветстзенно о Модель оп сывается уравнениями-, аналогичнр п-ш
ЛЯЮ1ЦИЙ вход селектора 110 соединен с входом 39 фор1 . ;лрователя 1 1 , Прямой выход селектора 110 соединен с суммирующим входом реверсивного счетчз-жа 111 К; зерсный выход селектор 10 соединен с вьгаитаюпцлм входам счетчика М 1. Выходы цифрового счетчика 1 1 соединены с соответс ;; вз Ю цими входами кодового преобразователя 1125 вьп-со- ды которого вместе с вьгходом старшего разряда реверсивног о : чгугчика 1 t 1 образуют выход Ач цифровой скорости сЬормт-тпозателя i 1
Устройство рабо -гает l:Jie;: yi(:, oCi- разом.
Преобразователь 2 тохов и преобразователь 4 напряжегнй осуществляют преобразование фазные: токов и напря- жен:нй соом ветс венно в сост обо ёщенных векторов тока Т,., напряжения U,,; U,, статора is УГО.Г:ЫЮЙ системе координат (У. ., и , неподвижной относич ельис; стлторл асмп- хронного двигателя.
В такой к : cIi- коорл.инат ненасы- щенный симметричный асивх гатель опнсывас ся скгте;; ных дифференциг.льпых уупи сительно скорое г А Bpai-iCHi-iji компонент потс;коспеплсч ия Ур и тока ста-гсра 1, ,,,
83929
где
активные сопротивления и LR оомоток статора и poTopaj „ приведенные индуктивности статора и ротора; L ti - взаимная индуктивность ротора и статора.
Устройство представляет собой электронную модель асинхронного двигателя 56, функционирующую в реальном масштабе време 1и с коррекцией по раз токов 1, ствующих блоке 7
1, - i: и
, выходах 32
1д двигателя 56 к ( .
им вычисленных i,,. JL
Вел ;1чины оазностей AT., - т сответ««
1д В
ilcj IP if}, получают
и 33 элементов 5 к 6 сравнения соо : ветстзенно о Модель опсывается уравнениями-, аналогичнр п-ш
уравнениям двиггтеля
г-., т,,.-.
. -iOii .foР
L.
ш ,
dVfl
rql.+ Mf.) - f %
Ь,Л.,
ц(;,,
аГ
- J г, t и
I
I
L
I -1% 1
1-.:,г,
ст зую;iiHf (|V
- uJST b
;| ая скоро
i CJJK i
-фиктивная
/равнения penisroTCH бло- третье и четвертое - б логе ом 8, яяюе - маси табнь:М элементов 12 и мматором 13. Известно, что если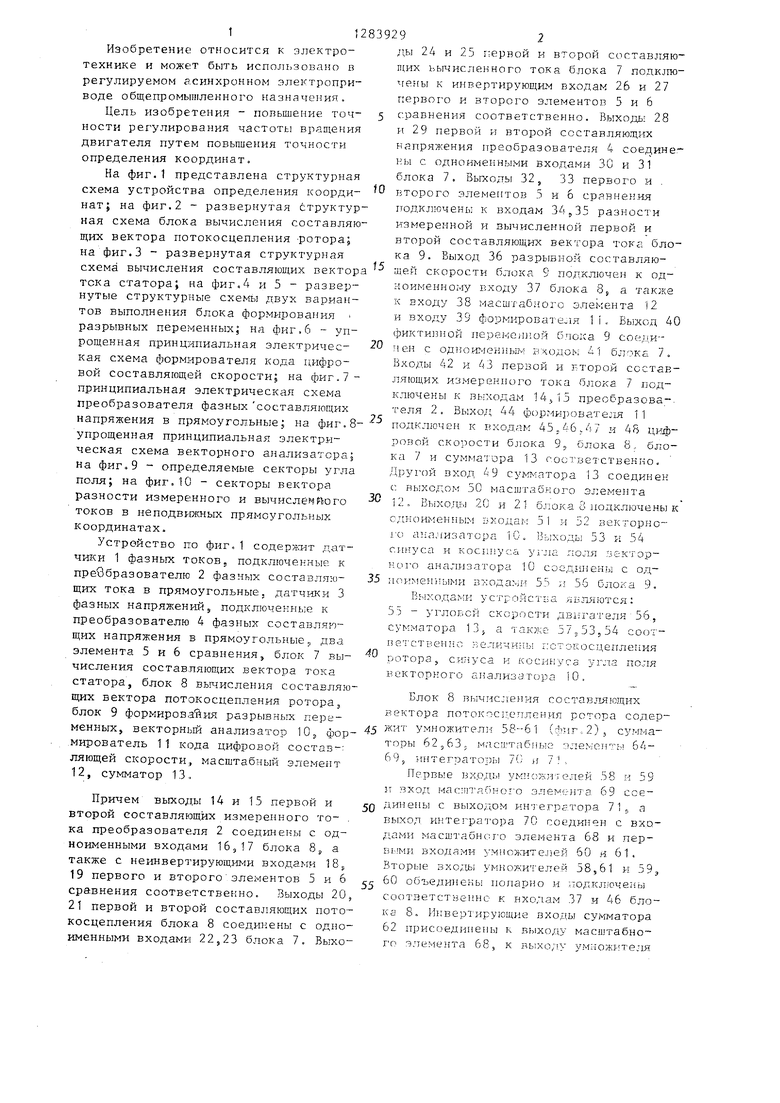
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1982 |
|
SU1039011A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1365335A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1988 |
|
SU1575285A2 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1984 |
|
SU1246317A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1986 |
|
SU1399882A1 |
| СИСТЕМА УПРАВЛЕНИЯ МАШИНОЙ ДВОЙНОГО ПИТАНИЯ | 1995 |
|
RU2106055C1 |
| Электропривод переменного тока | 1984 |
|
SU1464276A1 |
| СПОСОБ УПРАВЛЕНИЯ АСИНХРОННЫМ ЧАСТОТНО-РЕГУЛИРУЕМЫМ ЭЛЕКТРОПРИВОДОМ С КОРОТКОЗАМКНУТЫМ РОТОРОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2458447C1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| Устройство для определения координат асинхронного двигателя регулируемого электропривода | 1986 |
|
SU1403323A1 |

Изобретение относится к электро- техни се. Целью изобретения является попышение точности регулирования частоты. Угсазанная цель обеспечивается тем, что в устройство определения координат асинхронного двигателя (АД) введе блок 9 формирования разрьшных переме1и-:ь х, цекторньд анализатор 10, фop ;иpoвaтeль 1 1 кода цифровой состав- лярошей скорости, масштабный элемент |2 и cy DiaTop 13. Это позволяет в цепях выт-птслекия координат состояния АД операции умножения осл-ществлять с по ;оц:ью диЛфоаналоговык умножителе :, облада ощих ь;алой погрешностью, Кроме того, это улз чшает качество информации об угловой скорости 57s необходимой в системе регулирования АД. 10 ил. 1 табл. 00 Од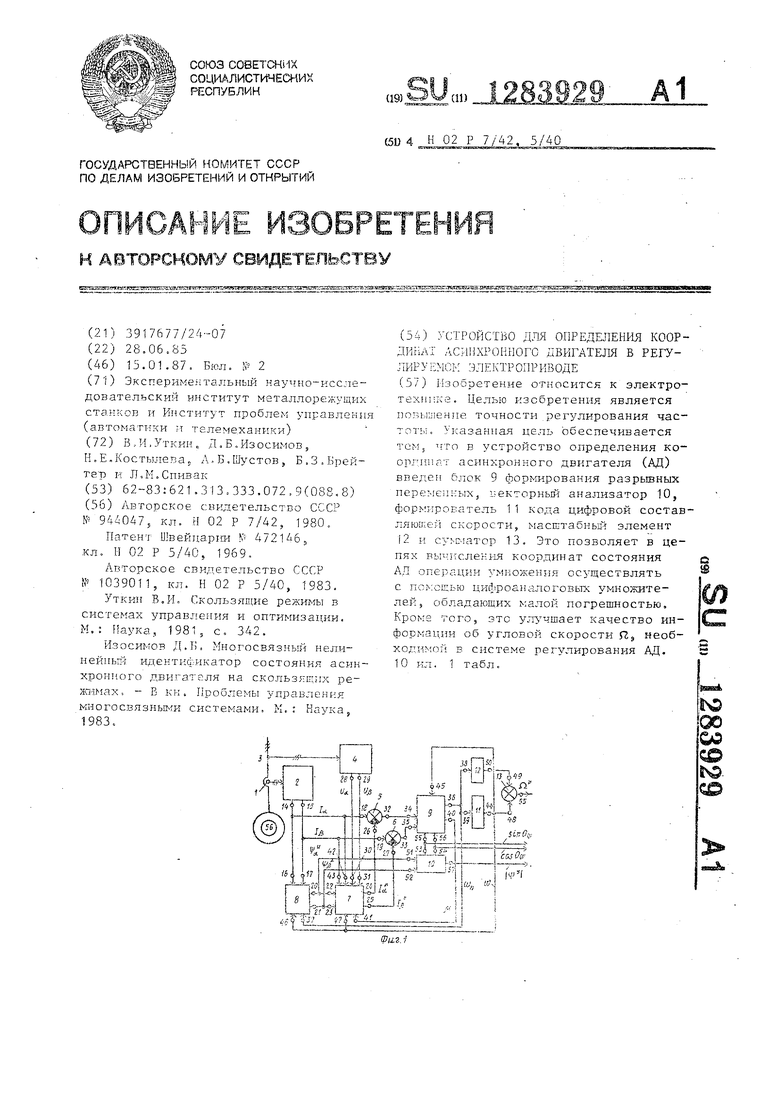
dl3
LR
7
Al
и
ul(|
составляющие разности
измеренного и вычисленного токов в прямоугольной системе координат (d, q) с осями, направленными по полю и ортогонально ему, то в модели возникает так называемый скользящий режим, который обусловит сходимость вычисленных переменных 1, „,((/ и к соответствующим реальным переменным состояния асинхронного двигателя 56. Первый вариант выполнения блока 9 (фиг.4) формирует корректирующие сигналы cOj, и р по вышеприведенным уравнениям. Получение величин Mj и ul(j происходит к координатном преобразователе 94 согласно уравнениям
uTj ., +uI,,Sin0 ,
U IpCosQ,.,
Д1, -iI Sin6y +
где 8;. - угол поля, т.е. угол осью oi неподвижной система координат и напряжением вектора потокосцепле- ния или осью d,
Второй вариант исполнения блока 9 (фиг.5) реишет задачу формирования сигналов О|, и pi на основе цифровой элементной базы.
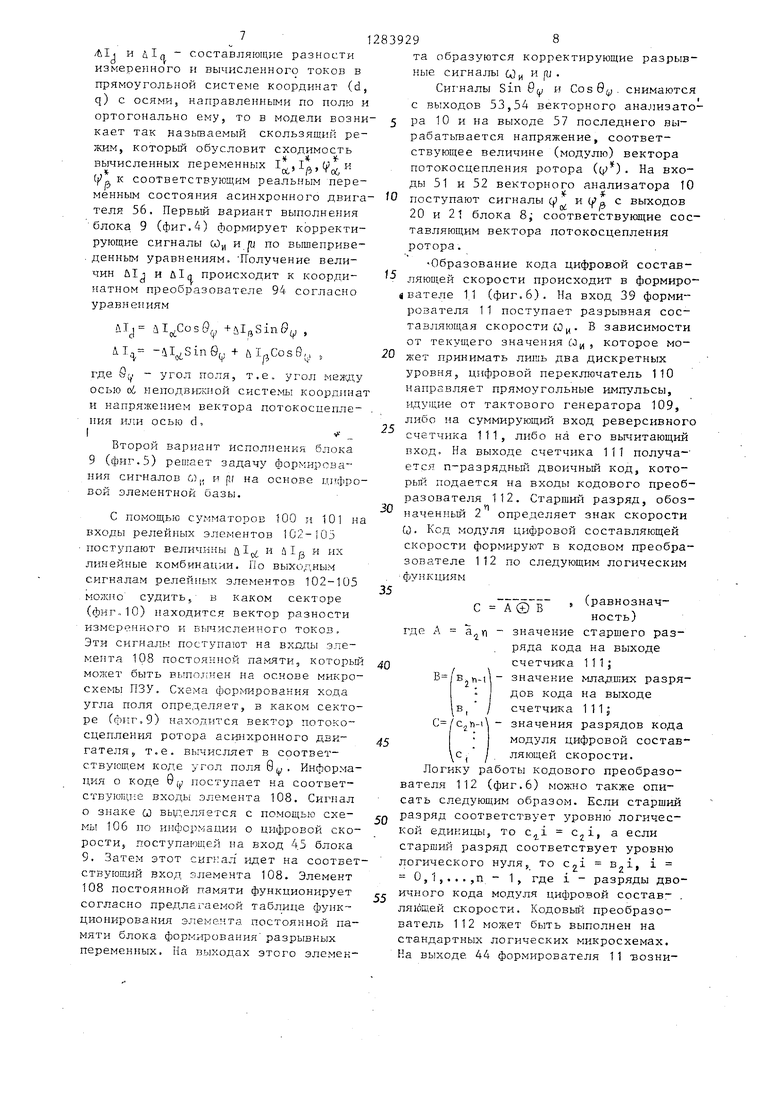
С помощью сумматоров 100 и 101 входы релейных элементов 1С2-105 поступают величины Ql./ и
н
alp и
их
линейные комбинации. По выходным сигналам релейных элементов 102-105 можно судить, в Каком секторе (фиг-10) находится вектор разности измеренного и вычисленного токов. Эти сигналы поступают на вхдды элемента 108 постоянной памяти, которьш молсет быть выполнен на основе микросхемы ПЗУ. Схема фор шрования хода угла поля определяет, в каком секторе () находится вектор потоко сцепления ротора асинхронного двигателя т.е. вычисляет в соответствующем коде угол поля0(. Информация о коде б(; поступает на соответ- ствуючцие входь; элемента 108. Сигнал о а вьц7,еляется с помощью схемы 106 по информации о цифровой скорости, поступающей на вход 4.5 блока 9. Затем этот сиг1:ал идет на соответствующий вход элемента 108. Элемент 108 постоянной памяти функционирует согласно предлагаемой таблице функционирования элемента постоянной памяти блока формирования разрывных переменных. На выходах этого элемен839298
та образуются корректирующие разрывные сигналы СО и и ,(U .
Сиг-налы Sin 0( и . снимаются с выходов 53,54 векторного анализатора 10 и на выходе 57 последнего вырабатывается напряжение, соответствующее величине (модулю) вектора потокосцепления ротора () . На входы 51 и 52 векторного анализатора tO
f поступают сигналы ( и ( с выходов
20 и 21 блока 8; соответствующие составляющим вектора потокосцепления ротора.
Образование кода цифровой состав- 5 ляюп ей скорости происходит в формиро а вателе 1,1 (фиг. 6). На вход 39 формирователя 11 поступает разрьтная составляющая скорости Ы,. В зависимости
fO
.
20
25
30
жет принимать лишь два дискретных уровня, цифровой переключатель 110 направляет прямоугольные импульсы, идущие от тактового генератора 109, либо на суммирующий вход реверсивного счетчика 111, либо на его вычитающий вход. На выходе счетчика 111 получа- ется п-разрядньш двоичный код, кото- рьй подается на входы кодового преобразователя 112. Старший разряд, обозначенный 2 определяет знак скорости Q. Код модуля цифровой составляющей скорости формируют в кодовом преобразователе 112 по следующим логическим функциям
5
0
5
0
5
где
С А© В
а„ VI
В(
BjH-i
С /С2П-1
, (равнозначность)
значение старщего разряда кода на выходе счетчика 111; значение младших разрядов кода на выходе счетчика 111; значения разрядов кода модуля цифровой составляющей скорости. Логику работы кодового преобразователя 112 (фиг.6) можно также описать следующим образом. Если старщий разряд соответствует уровню логической единицы, то , а если старшш разряд соответствует уровню логического нуля, то Cj, , i О,1,..,,n - 1, где i - разряды двоичного кода модуля цифровой состав- . ля:б1Дей скорости. Кодовый преобразователь 112 может быть выполнен на стандартных логических микросхемах. На выходе 44 формирователя 11 ъсзникает п-разрядный код цифровой скорости, один из разрядов которого несет информацию о знаке скорости, а остальные - о двоичном коде цифровой составляющей скорости. Фактически форми- рователь 11 является интегратором сигнала и) „, выполненном на основе Цифровой элементной базы.
Информация о цифровой составляющей скорости цоступает на вход 48 сумматора 13« Здесь она преобразуется в аналоговый эквивалент и складывается с промасштабированной разрывной составляющей скорости. На выходе 55 сумматора 13 образуется величина f2.s соотве ,тствующая угловой скорости двигателя 56.
Таким образом, снабжение устройства для определения координат асинхронного двигателя блоком формирования разрывных переменных, векторным анализатором, формирователем кода цифровой составляющей скорости, масштабным элементом и сумматором дает возможкость использования двух составляющих скорости - разрывной и цифровой, с преоблада ощим (на порядок) весом цифровой. Это позволяет в цепях вычисления координат состояния двигателя некоторые операции уг ноже- ния производить с помощью цифроана- логовь х умножителей, обладающих малой погрешностью, что обеспечит по- вьшгание точности определения координат асинхронного двигателя. Кроме того, это улучшает качество информации о угловой скорости, необходимой в системе регулирования асинхронным электроприводом.
Формула изобретения
Устройство ддя определения координат асинхронного двигателя в регу Л1фуемом электроприводе5 содержащее датЧ1 1Ки фазных токов, подключенные к преобразовате .лю фазных составляю- щих тока, в прямоугольные., датчики фазных напряженийJ подключенные к преобразователю фазных составляющих- напрял ения в прямоугольные j два элемента сравнения, блок вычисления составляющих вектора тока статора, блок вычисления составляющих вектора пото- косцепления ротора, причем выходы первой и второй составляющих измеренного тока преобразователя фазных составляющих тока в прямоугольные соеди
нены с одноименными входами блока вычисления составляющих вектора потоке- сцепления ротора, а/также с неинвертирующими входами первого и второго элементов сравнения соответсгвснгЮд выходы первой и второй составляющих потокосцепления блока вычисления составляющих вектора потокосдеплеикя ротора соединены с одно51К8Ннь М -1 входами блока вычисления составляющих вектора тока статора, выходь; первой и второй составляющих вьтисленгюго тока которого подключены к инверткру шдим входам первого и в торог о элементов сравнения соответственью,, выходы первой и второй составляющих напряжег-агя пр е о бр а 3 о в ат е ля фа з н ых с о с т аз ляюц s-ix напряжения в прямоуголы ые соединены с одноименными входами блока вь-ч1и:ления состав гшющих вектора т ска статора, о т л к ч а ю го, е е с я тем, что, с целью повышения тсчност:, регулирования частоты врелдекия .е- ля путем повышения точности определения коо рдинат 5 устройстБО сиаб;:-;ен:о блоком формирован1 я разрывных г;ере- менных, векторны -- анализаторон формирователем кода цифровой составляющей скорости, масштабным элементом, сумматором, гфичем выходы первого и второго элементов сравг/апия подкл оче- ны к входам сигн-алов раш-гости измеренной и вычисленной первой и второй составляющих вектора тока блока формирования разрывных перемер-Ны}::, зыход разрывной составляющей скорости которого подключен к одпоиг- еыноьг;/ яхсл у блока вычисления соста л ;ю;.1;кл зе;-г: о- ра потокосцепления ротора, а тггкже к входам масштабного эле;мепта v. фор- Mi-гоователя кода цифровой сос г;::..Ю111ей скорости, выход фт-ж гиБНой пеггаменной блока формирования разуьип .ыу переменных соединен с одноимеличьи ыхо, ;ом блока вычисления составляющих векто
рл тока статора, Б ходы nep Boi: -; второй составляющих измереппкп о тока которого подключены к одиоикеилкк з;-п-о дам преобразователя фазных COCTP.B: LHK;I- u;nx тока в прямоуголызые. выход фор- 5ирователя кода цифровсй состгвля;п- щей скорости подклю ен к входам ровой скорости блока .;рова1 кя ;;;аз- Р1-.1ВНЫХ переменных, блока ЕЬ-чкслекия составляющих вектора тока статора,, блока вычисления составляющих вектора потокоспепления ротооа и суммп : о- рги другой вход последнего соедг-тнен
111283929 12
с выходом масштабного элемента, вы- соединены с одноименными входами бло- ходы первой и второй составляющих ка формирования разрывных переменных, потокосцепления блока вычисления сое- выходами устройства являются выход тавляющих вектора потокосцепления угловой скорости двигателя сумматора ротора подключены к.одноименным вхо- 5 и вьгходы величины потокосцепления родам векторного анализатора,- вьгходы тора, синуса и косинуса угла поля синуса и косинуса угла поля которого векторного анализатора. , .
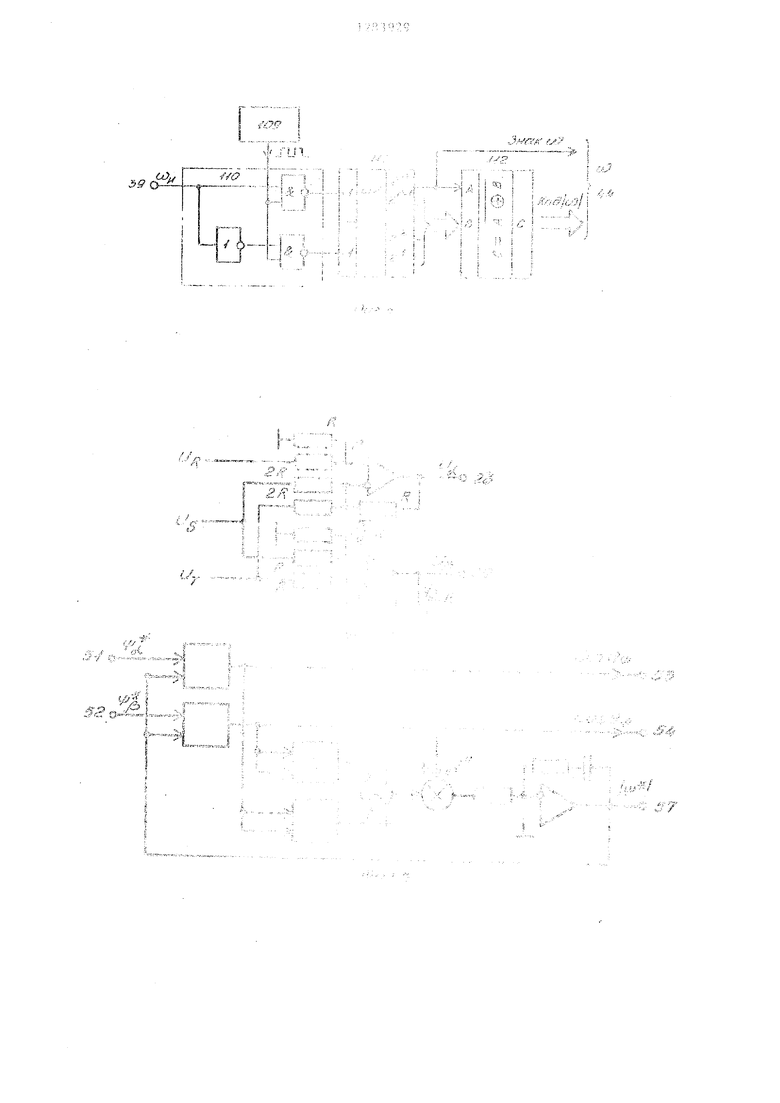
УСТРОЯСТВО для ОПРЕДЕЛЕНИЯ КООРДИНАТ
. I
XX
4
II
XXII
+-+
«t
Itl
XX111
+ .-+4IV
++ ,
XXIV
VI
XX
- +
X Vll н я
. - «
- -
X VIII ;,
- +- .
XX
XX
XX
+
VI
0
... .-.-.
4рс л;:;Ф
-л4г
t, s I
J (:Ь.|...„.1
i i
i/
..,
-Л у--с..-..-..
3
аО
5§
r-J «М
1 -
т J чу
«
&
i.f} 0
Ca&ff /.
ffj
о
s
i/г. 4 4 &
or
J4 ©.-.
3 О 8У/:/7 0™.-.-™
5 ©.
«r /.
J/ViS: rci
(jOh
OJ
H-...,,-JL.
f /ff
Л7Р i Ф . Г1
..„.J. I
i/.ff
О4 Л1
Ю
-(JA/t/ / « SVVZVV /fO///7 ff mo/ ffi§i.
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент Швейцарии , кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1982 |
|
SU1039011A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Уткин В,И | |||
| Скользяп(ие режимы в системах управле -гр я и оптимизации | |||
| М | |||
| : Наука, Г 342 | |||
| Изосимов Д.Б | |||
| Многосвязный нели- нейньй идентисЬ-Икатор состояния асинхронного двигаталя на скользяшь х ре- ш-iMax | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Проблемы управления многосвязньми системами, г „.,, 11 с1 V К 3 , 1983 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
