функции арксинуса и релейным элементом. Вход узла 9, образованный входом координатного преобразователя, соединен с выходами датчиков 2 фазных токов асинхронного двигателя. Вход узла 9, образованный входом генератора 15, подключен к выходу задания фазы формирователя 12 задания амплитуды и фазы. Выход узла 9, образованный выходом релейного блока 30, соединен с одним входом сумматора 7, другой вход которого подключен к блоку 8 задания частоты, а выход к входу блока 6 управления автономным инвертором 3 tOKa, соединенного через датчик тока 14 и дроссель 4 с управляемым вьтрямителем 5. К выходу инвертора 3 подключена статорная обмотка асинхронного двигателя 1. Входы регулятора 13 тока соединены с выходом датчика 14 тока и вькодом задания амплитуды тока статора формирователя 12, на входы которого поступают сигналы с задатчиков 10 и II соответственно активной и реактивной составляющих тока статора. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления асинхронным электроприводом и устройство для его осуществления /его варианты/ | 1982 |
|
SU1538212A1 |
| Частотно-регулируемый синхронный электропривод | 1986 |
|
SU1319220A2 |
| Задатчик активного тока дляАСиНХРОННОй МАшиНы | 1978 |
|
SU847479A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1365335A1 |
| Электропривод | 1979 |
|
SU875566A1 |
| Частотно-управляемый электропривод | 1989 |
|
SU1720138A1 |
| СПОСОБ ВЕКТОРНОЙ ОРИЕНТАЦИИ ТОКА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ЭНЕРГИИ И УСТРОЙСТВО ВЕКТОРНОЙ ОРИЕНТАЦИИ ("ВЕКТОРИНГ") ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2141720C1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| Электропривод переменного тока и его варианты | 1981 |
|
SU1054863A1 |
Изобретение относится к электротехнике и может быть использовано в опорно-поворотных устройствах, в станках с числовым программным управлением. Целью изобретения является повышение точности управления моментом асинхронного электродвигателя путем обеспечения высокого быстродействия и качества переходного процесса согласования заданного и истинного угловых положений результирующего вектора тока статора. Для этого в частотно-управляемом электроприводе узел 9 коррекции фазовой ошибки снабжен координатным преобразователем 16, генератором 15 управляемых напряжений, блоками 18 и 19 деления, блоком 17 вьщеления модуля, блоками 20-24 умножения, сумматорами 25-28, преобразователем 29 (О ел 00 ел к|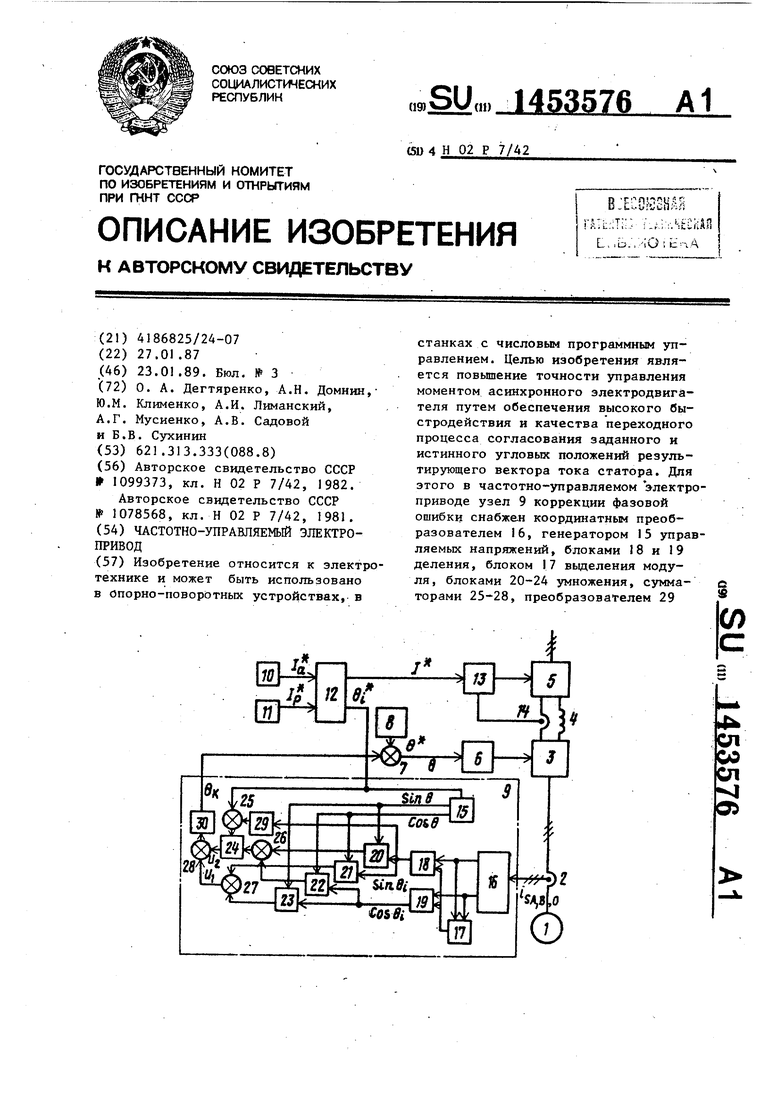
1
Изобретение относится к электротехнике, а именно к автоматизированному электроприводу, и может быть использовано в прецизионных следящих электроприводах опорно-поворотных устройств, станков с ЧГО/ и других: механизмов с повышенньми требованиями к точности регулирования и отслеживания .управляющих воздейст-
ВИЙ.
Цель изобретения - повьшение точности управления Моментом асинхрон-- него двигателя путем обеспечения высокого быстродействия и качества переходного процесса согласования . заданного и истинного угловых положений результирующего вектора тока статора.
На чертеже представлена функцио- нальная схема частотно-управляемого электропривода.
Частотно-управляемый электропривод содержит асинхронньй двигатель 1 , статорные обмотки которого че. датчик 2 фазных токов подключены к выходам автономного инвертора 3 тока вход которого через дроссель 4 подключен к выходу управляемого вьшря- мителя 5, блок 6 управления автоном- ным инвертором 3 тока, соединенный входом с выходом сумматора 7, один из входов которого подключен к выходу блока 8 задания частоты, а другой вход подключен к выходу узла 9 кор- рекции фазовой ошибки, задатчик 10 активной составляющей.тока статора
и задатчик 11 реактивной составляющей тока статора, подключенные выходами к сооответствующим входам формирователя 12 задания амплитуды и фазы тока статора, регулятор 13 тока, подключенный одним входом к выходу задания амплитуды указанного формирователя 12, а другим входом - к выходу датчика 14 тока, установленного на выходе управляемого вьтрямителя 5. При этом выход датчика 2 фазных токов и выход задания фазы формирователя 12 задания амплитуды и фазы тока статора подключены соответственно к второму и первому узла 9 коррекции фазовой ошибки.
В частотно-управляемом электроприводе узел 9 коррекции фазовой ошибки снабжен генератором 15 управляемых напряжений, координатньм преобразователем 16, блоком 17 вьщеле- ния, модуля, блоками 18 и 19 деления, блоками 20-24 умножения, сумматорами 25-28, преобразователем 29 функции арксинуса и релейным элементом 30.
Вход генератора 15 управляемых напряжений и вход координатного преобразователя 16 образуют соответственно первьй и второй входы узла 9 коррекции фазовой ошибки. Первый и второй выходы координатного преобразователя 16 соединены соответственно с входами делимого первого и второго блоков 18 и 19 деления и с входами
блока 17 вьщеления модуля, выход которого подключен к входам делителя блоков 18 и 19 деления. Выход блока 18 деления соединен с первыми входами первого и второго блоков 20 и 21 умножения, вторые входы которых соединены соответственно с первым и вторым выходами генератора 15 управляемых напряжений.
Выходы первого и третьего блоков 20 и 22 умножения подключены к входам второго сумматора 26. Выход блока 1В деления через преобразователь 29 функции арксинуса соединен с одним из входов первого сумматора 25, другой вход которого подключен к первому входу узла 9 коррекции фазовой ошибки. Выходы сумматоров 25 и 26 соции фазовой ошибки. На входы послед него поступают сигналы 0 и ед.сС выхода формирователя 12 и с выхода датчика 2 фазных токов. Генератор 15 управляемых напряжений по сигналу 0, формирует на выходах гармонические функции sin б и cos б .
Координатный преобразователь 16 10 по сигналам 1вл,в.с Формирует модуль Ig и составлякмцие Ig и Ig реального тока статора, по значениям которых н выходах блоков I8 и I9 деления образ ются сигналы
15
cos Q:
i5.i.
IT -9:-Tf.шr,.„. сумма rupuB j И -io cQ- Блоки 21 и 23 умножения и сумма- единены с входами пятого блока 24 ум- 20 формируют на входе сумматора
НОЖеНИЯ. Выходы второго и четвертогогигнятт nanui.
блоков 21 и 23 умножения подключены к входам третьего сумматора 27. Выходы блока 24 умножения и третьего сумматора 27 подключены к входам четвертого сумматора 28, выход которого подключен к входу релейного элемента 30, выход которого образует выход узла 9 коррекции фазовой ошибки.
Частотно-управляемый электропривод работает следующим образом.
Задатчики активной 10 и реактив25
30
ной 11 составляющих тока статора формируют сигналы задания I и 1 в декартовой системе координат, связанной с вектором потокосцепления ротора. В формирователе 12 указанные сигналы преобразуются к полярной системе координат, при этом на его выходах получают сигналы задания модуля I и фазы 0. вектора тока статора отно28 сигнал U, , равный
и, - sin0,.cos 0; - cosd- - sinP; sinOt -б; ), .
где 0 и 0; - заданное и истинное зна чения углового положения результирующего век тора тока статора it.
Блоки 20, 22 и 24 умножения, сумматор 25, преобразователь 29 и CJTM- матор формируют сигнал U2 на входе сумматора 28 по выражению
35 Uj « (sin0f. sin0; + cos0;)
«(9,- arcein(8in9)) - () cos( 0;).
Таким образом, на первый и второй входы сумматора 28 подаются сигналы и, и Uj, представляющие собой синус
сительно вектора потокосцепления ротора.
Таким образом, на первый и второй входы сумматора 28 подаются сигналы и, и Uj, представляющие собой синус
теме автоматического регулирования с помощью регулятора 13 тока.
Управляющие импульсы на ключи автоугла фазовой ошибки заданного 0 и истинного 6; значений углового поло- Сигнал задания 1 модуля тока ста- 45 результирующего вектора тока тора отрабатывается в замкнутой сие- статора и его производной. При этом
релейный элемент 30 работает в скользящем режиме с высокой частотой пе- р еключений. На выходе релейного эленомного инвертора 3 тока формируются „, значит и на выходе узла на выходах блока 6 управления инвер- коррекций фазовой ошибки получают тором, при этом частота управляющих сигнал импульсов пропорциональна величине сигнала 9 на выходе сумматора 7,. который получается путем суммирования сигнала задания частоты.9 , посту) где К пающего с выхода блока 8 задания частоты, и корректирующего сигнала 0к , постзшающего с выхода узла 9 коррек55
бк кмакс ( - 9; ) - - К( 9;)cos(0 - 9; ),
- масштабный коэффициент второго входа сумматора 28i кмаис максимальный сигнал коррекции фазовой ошибки,
1453576
ции фазовой ошибки. На входы последнего поступают сигналы 0 и ед.сС выхода формирователя 12 и с выхода датчика 2 фазных токов. Генератор 15 управляемых напряжений по сигналу 0, формирует на выходах гармонические функции sin б и cos б .
Координатный преобразователь 16 по сигналам 1вл,в.с Формирует модуль Ig и составлякмцие Ig и Ig реального тока статора, по значениям которых на выходах блоков I8 и I9 деления образуются сигналы
15
cos Q:
i5.i.
IT
Блоки 21 и 23 умножения и сумма- 20 формируют на входе сумматора
гигнятт nanui.
25
0
28 сигнал U, , равный
и, - sin0,.cos 0; - cosd- - sinP; sinOt -б; ), .
где 0 и 0; - заданное и истинное значения углового положения результирующего вектора тока статора it.
Блоки 20, 22 и 24 умножения, сумматор 25, преобразователь 29 и CJTM- матор формируют сигнал U2 на входе сумматора 28 по выражению
5 Uj « (sin0f. sin0; + cos0;)
«(9,- arcein(8in9)) - () cos( 0;).
Таким образом, на первый и второй входы сумматора 28 подаются сигналы и, и Uj, представляющие собой синус
угла фазовой ошибки заданного 0 и истинного 6; значений углового поло- 5 результирующего вектора тока статора и его производной. При этом
значит и на выходе узла коррекций фазовой ошибки получают сигнал де К
бк кмакс ( - 9; ) - - К( 9;)cos(0 - 9; ),
- масштабный коэффициент второго входа сумматора 28i кмаис максимальный сигнал коррекции фазовой ошибки,
На выходе сумматора 7 образуется входной сигнал блока 6 управления инвертором тока, равный
6 - Ql ±Q
у. )
где
е.
сигнал коррекции фазовой ошибки заданного и истинного значений углового по ложения результирующего . вектора тока статора. Таким образом, предлагаемое выполнение узла коррекции фазовой ошибки обеспечивает в сравнении с известным, предусматривающим дискретное измерение фазовой ошибки, более высокую точность управления моментом электродвигателя за счет обеспечения высокого быстродействия и качества переходного процесса согласования заданного и истинного угловых положений результирующего вектора тока ст атора.
Формула изобретения
Частотно-управляемый электропривод, содержащий асинхронный двигатель, статорные обмотки которого через датчик фазных токов подключены к выходам автономного инвертора тока вход которого через дроссель подключены к выходу, управляемого вьшрями- теля, блок управления автономным инвертором тока, соединный входом с выходом сумматора, один из входов которого подключен к выходу блока задания частоты, а другой вход подключен к выходу узла коррекции фазовой ошибки, задатчики активной и реактивной составляющих тока статора подключенные выходами к соответствующим входам формирователя задания амплитуды-и фазы тока статора, регулятор тока, подключенный одним входом к вькоду задания амплитуды указанного формирователя,, а другим входом - к выходу задатчика тока,установленного на выходе управляемого выпрямителя, при этом вьпсоды датчика фазных токов и выход задания фазы формирователя амплитуды и фазы тока статора подключены соответственно к второму и первому входам узла коррекции фазовой ошибки, о т л и ч а- ю щ и и с я тем, ЧТО;, с целью повышения точности управления моментом асинхронного двигателя путем обес4535766
печения высокого быстродействия и качества переходного процесса согласования заданного и истинного угловых положений результирующего вектора тока статора, узел коррекции фазовой ошибки снабжен генератором управляемых напряжений, координатным преобразователем, блоком вьще1Q ления модуля, первым и вторым блоками деления, первым, вторым, третьим, четвертью и пятым блоками умножения, первым, вторым, третьим и четвертым сумматорами, преобразо-
15 вателем функции арксинуса и релейным элементом, при этом вход генератора управляемых напряжений и вход координатного преобразователя образуют соответственно первый и второй входы уз20 ла коррекции фазовой ошибки, первьй и второй выходы координатного преобразователя соединены соответственно с входами делимого первого и второго блоков деления и с входа ми блока
25 вьщеления модуля, выход которого подключен к входам делителя первого и второго блоков деления, выход первого блока деления соединен с первыми входами первого и второго бло30 ков умножения, вторые входы которых соединены соответственно с первым и вторым выходами генератора управляемых напряжений, выход второго блока деления подключен к первьм вхо„ дам третьего и четвертого блоков умножения, вторые входы которых соединены соответственно с вторым и первым выходами генератора управляемых напряжений, выходы первого и
40 третьего блоков умножения подключены к входам второго сумматора, выход первого блока деления через преобразователь функции арксинуса соединен с одним из входов первого сумматора,
45 другой вход которого подключен к первому входу узла коррекции фазовой ошибки, выходы первого и второго сумматоров соединены с входами пятого блока умножения, выходы второgQ го и четвертого блоков умножения подключены к входам третьего сумматора, выходы пятого блока умножения и третьего сумматора подключены к входам четвертого сумматора, выход котоgg рого подключен к входу релейного элемента, выход которого образует вы- ход узла коррекции фазовой ошибки.
| Частотно-регулируемый асинхронный электропривод | 1982 |
|
SU1099373A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Частотнорегулируемый асинхронный электропривод | 1981 |
|
SU1078568A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
