SiniH.COSV
со ел
со 00
О1
1
Изобретение относится к -электроехнике, а именно к частотно управля мым электроприводам, построенным на снове асинхронных двигателей и может ыть использовано в быстродействующих ледящих приводах, например антенн адиолокационных станций.
Целью изобретения является улучение динамических показателей тропривода за счет увеличения быстро- ействия и повышения точности регули ования момента,
На фиг. 1 представлена функциональ ная схема частотно-регулируемого электропривода; на фиг, 2 - схема . блока компенсации; на фиг. 3 - схема блока вычисления момента; на фиг. 4 векторная диаграмма асинхронного двигателя.
Чacтoтнo)eгyлиpye фш электропри™ вод содержит асинхронньш двигатель 1 (фиг. 1), подключенньш через блок 2 датчиков фазньгх токов к выходам пре™ образователя 3 частоты, датчик 4 по- токосцепления, датчик 5 частоты вра щения, связанные с асинхронным двига - телем 1, регулятор 6 частоты враще ния, вход которого соединен с выхо дом датчика 5 частоты вращения, а выхрд с первым входом регулятора 7 момента, регулятор 8 потокосцепле- ния, блок 9 вычисления составляющих тока статора, подключенный входами к выходам блока 2 датчиков фазных токов, блок 10 вычисления составляющих потокосцепления, соединенный входами с выходами датчика 4 потокосцепления и с выходами блока 9 вычисления сос тавляющих тока статора, векторный анализатор 1I, подключенньш входами к выходам блока 10 вычисления составляющих потокосцепления, блок 12 компенсации, соединенный входом с выходом датчика 5 частоты вращения, последовательно соединенные преобра- зователь 13 координат, первый блок 14 фазных сумматоров и блок 15 регуляторов фазных токов, при этом выход модуля потокосцепления векторного анализатора 11 подключен к входу регулятора 8 потокосцепления, а выходы опорных функций векторного анализатора 11 подключены к соответствующим опорным входам преобразователя 13 ко- ординат,
В частотно-ре гул ируег-1ый электропривод введены блок 10 вычисления момента и второй блок 7 фазных сум-
1365335
маторов, а блок
10
15
20
25
30
35
40
45
50
55
жен двумя допол ными входами, п ключен к выходам фазных сумматор ходам блока 10 ющих потокосцепл ды блока 12 ком соответствующим 17 фазных сумма входами с выход торов фазных то управляющими вх 3 частоты Вход момента подключ 9 вычисления со тора и блока 10 ющих потокосцеп 16 вычисления м гим входом регу выход которого подключены к со ляющим входам п ординат. ,
Блок 12 комп двумя умножител двумя масштабны 21, двумя инвер 22 и 23, двумя тремя узлами 26 ошибки, каждый пропорционально ном 29, релейны ляемым коммутат ния, инвертирую сумматором 33. телей 18 и 19 о и образуют осно компенсации, вт лей 18 и 19 обр тельный многофа компенсации. Вы ля 18 через пер тель 20, а выхо 19 через второй 21 подключены к матора 24, Выхо усилителя 20 че ющий усилитель масштабного уси венно соединены сумматора 25. В теля 19 через в усилитель 23 по ду первого узла ошибки. Выходы соединены с пер ственно второго
маторов, а блок
5
0
5
0
5
0
5
0
5
12 компенсации снабжен двумя дополнительными многофазными входами, первый из которых под-i ключен к выходам первого блока 14 фазных сумматоров, а второй - к выходам блока 10 вычисления составляющих потокосцепления., при этом выходы блока 12 компенсации подключены к соответствующим входам второго блока 17 фазных сумматоров, соединенного входами с выходами блока 15 регуляторов фазных токов, а выходами - с управляющими входами преобразователя 3 частоты Входы блока 16 вычисления момента подключены к выходам блока 9 вычисления составляющих тока статора и блока 10 вычисления составляющих потокосцепления, а выход блока 16 вычисления момента соединен с другим входом регулятора 7 момента, выход которого и выход регулятора 8 подключены к соответствующим управляющим входам преобразователя 13 координат. ,
Блок 12 компенсации выполнен с двумя умножителями 18 и 19 (фиг. 2), двумя масштабными усилитепями 20 и 21, двумя инвертирующими усилителями 22 и 23, двумя сумматорами 24 и 25 и тремя узлами 26-28 выделения знака ошибки, каждый из которых снабжен пропорционально-дифференцирующим зв е- ном 29, релейным элементом 30, управляемым коммутатором 31 на два положения, инвертирующим усилителем 32 и сумматором 33. Первые входы умножителей 18 и 19 объединены между сойой и образуют основной вход блока 12 компенсации, вторые входы умножителей 18 и 19 образуют первый дополнительный многофазный вход блока 12 компенсации. Выход первого умножителя 18 через первый масштабный усилитель 20, а выход второго умножителя 19 через второй масштабный усилитель 21 подключены к входам первого сумматора 24, Выход первого масштабного усилителя 20 через первьш инвертирующий усилитель 22, а выход второго масштабного усилителя 21 непосредственно соединены со входами второго сумматора 25. Выход второго умножителя 19 через второй инвертирующий усилитель 23 подключен к первому входу первого узла 26 -вьщеления знака ошибки. Выходы сумматоров 24 и 25 соединены с первыми входами соответственно второго и третьего узлов 27
31
и 28 выделения знака ошибки. Второй дополнительный многофазный вход блока 12 компенсации соединен со вторыми входами узлов 26-28 выделения зна ка ошибки, в каждом из которых к второму входу подключена цепочка из последовательно соединенных пропорционально-дифференцирующего звена 29 и релейного элемента 30, выходом соеди ненного с управляющим входом коммутатора 31, средний вывод которого образует первый вход узла 26-28 вьще- .ления знака ошибки, а переключающие вьшоды коммутатора 31 через инвертор 32 и непосредственно подключены к входам сумматора 33, выход которого образует соответствующий выход блока 12 компенсации.
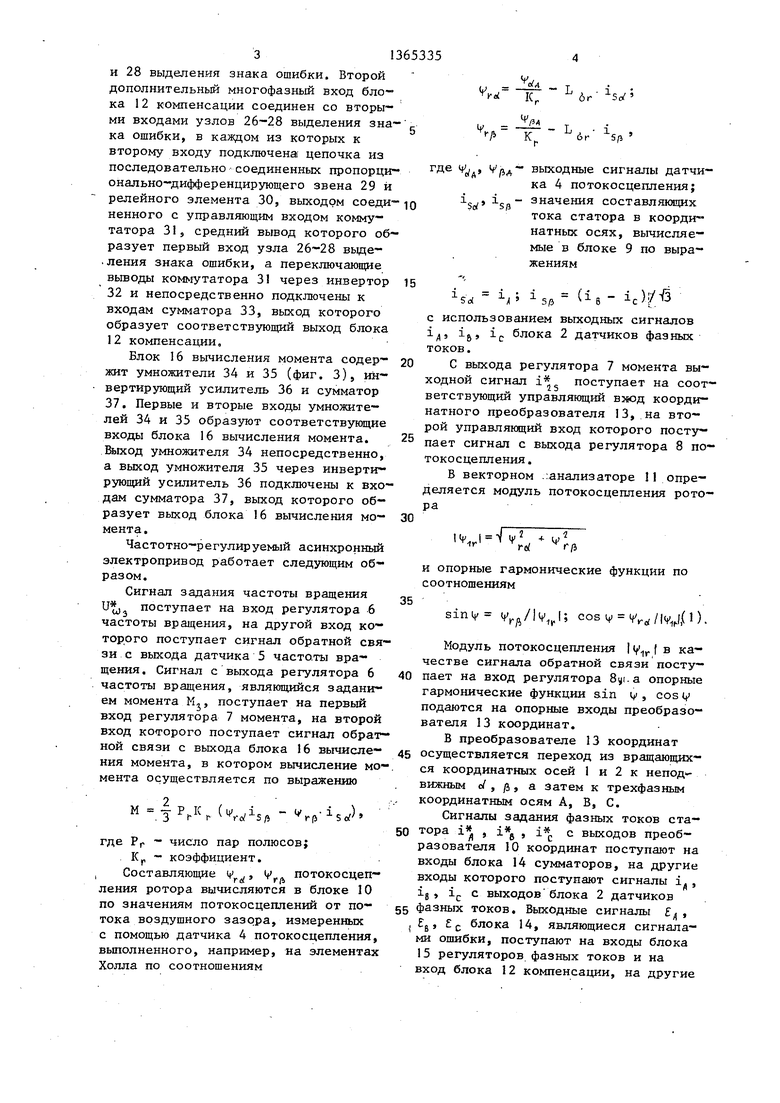
Блок 16 вычисления момента содер- жит умножители 34 и 35 (фиг. 3), инвертирующий усилитель 36 и сумматор 37. Первые и вторые входы умножителей 34 и 35 образуют соответствующие входы блока 16 вычисления момента. Выход умножителя 34 непосредственно, а выход умножителя 35 через инвертирующий усилитель 36 подключены к входам сумматора 37, выход которого образует выход блока 16 вычисления мо- мента.
Частотно-регулируемый асинхронный электропривод работает следующим образом.
Сигнал задания частоты вращения
поступает на вход регулятора 6 частоты вращения, на другой вход которого поступает сигнал обратной связи с выхода датчика 5 частоты вращения. Сигнал с выхода регулятора 6 частоты вращения, являющийся заданием момента Mj, поступает на первый вход регулятора 7 момента, на второй вход которого поступает сигнал обратной связи с выхода блока 16 вычисления момента, в котором вычисление момента осуществляется по выражению
2
М
з
5 ft
V
Г(5
.),
где РГ - число пар полюсов;
Kj, - коэффициент. Составляющие V,
V .. потокосцеп-
гвС г ления ротора вычисляются в блоке 10
по значениям потокосдегшений от потока воздушного зазора, измеренных с помощью датчика 4 потокосцепления, вьшолненного, например, на элементах Холла по соотношениям
J
Кг
Ji к.
А „
- L
So
6г SP
1„- So/ SP
ц , Удд выходные сигналы датчика 4 потокосцепления; значения составлякицих тока статора в координатных осях, вычисляемые в блоке 9 по выражениям
Sof
1,
5
ig - ijy
использованием выходных сигналов
6
i блока 2 датчиков фазных
токов.
С выхода регулятора
7 момента выходной сигнал 1 поступает на соответствующий управляющий вж)д координатного преобразователя 13, на второй управляющий вход которого поступает сигнал с выхода регулятора 8 по- токосцепления.
В векторном .анализаторе 11 определяется модуль потокосцеппения ротора
v.
.,.f
IV
r/j
ный обя
6 косвя6нийрой ратлемо.
40
45
,
35
и опорные гармонические функции по соотношениям
sint V./IV,J; COS v 4 r rf/l% f,(l).
Модуль потокосцепления 1 у f в качестве сигнала обратной связи поступает на вход регулятора .a опорные гармонические функции sin 1 , cos v подаются на опорные входы преобразователя 13 координат.
В преобразователе 13 координат осуществляется переход из вращающихся координатных осей 1 и 2 к непод - вижным с/ , /i, а затем к трехфазным координатным осям А, В, С.
Сигналы задания фазных токов ста-
тора 1
i с выходов преоб-
1 ,«
Л 6 разователя 10 координат поступают на
входы блока 14 сумматоров, на другие входы которого поступают сигналы 1
ij , ij. с выходов блока 2 датчиков
-А
55 фазных токов. Выходные сигналы , , Eg, J. блока 14, являющиеся сигналами ошибки, поступают на входы блока 15 регуляторов фазных токов и на вход блока 12 компенсации, на другие
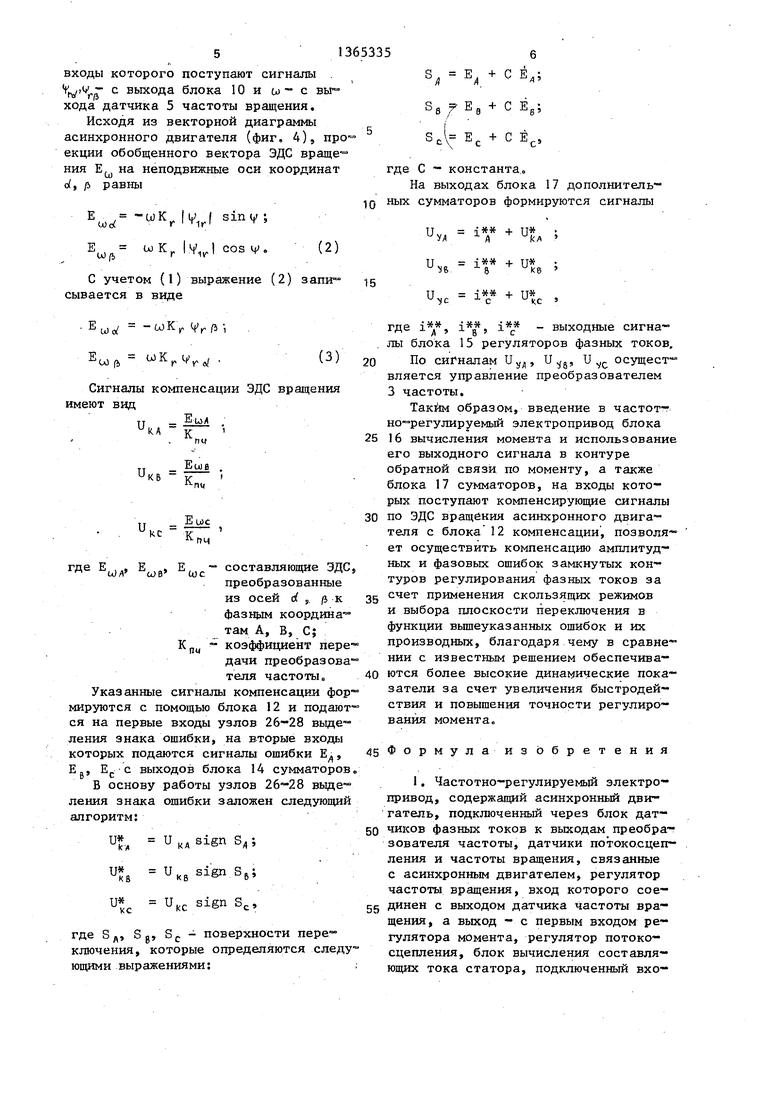
входы которого поступают сигналы . с выхода блока 10 и ы с вы хода датчика 5 частоты вращения. Исходя из векторной диаграммы асинхронного двигателя (фиг, 4), про екции обобщенного вектора ЭДС враще- ния Е( на неподвижные оси координат d, /5 равны
sinv;
t К г I V, I COS If .
(2)
С учетом (1) выражение (2) запи сывается в виде
S, CE,; SB f Eg + С Eg;
ScV EC + С Ё,
где С - константа.
На выходах блока 17 дополнитель 10 ных сумматоров формируются сигналы
тт т + и Ул д kA
TI 1 + TI 6, 6 k8
15
TT 1 + IT c с ч.с 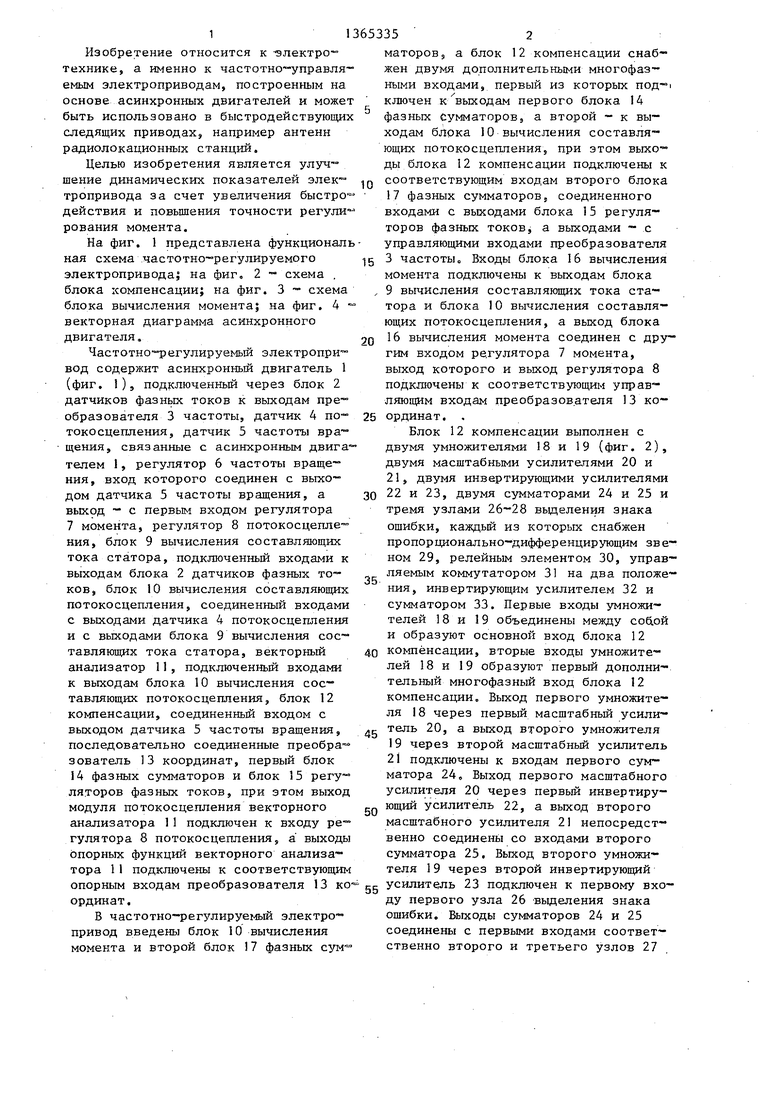
| название | год | авторы | номер документа |
|---|---|---|---|
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2313894C1 |
| ВЫСОКОДИНАМИЧНЫЙ БЕЗДАТЧИКОВЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ МОМЕНТОМ | 2012 |
|
RU2498497C1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1347142A1 |
| ЧАСТОТНО-РЕГУЛИРУЕМЫЙ АСИНХРОННЫЙ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2401502C2 |
| Частотно-управляемый электропривод | 1986 |
|
SU1372581A1 |
| Асинхронный электропривод | 1990 |
|
SU1767690A1 |
| Частотно-регулируемый электропривод | 1986 |
|
SU1453574A1 |
| Устройство для определения координат асинхронного двигателя в регулируемом электроприводе | 1985 |
|
SU1283929A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Электропривод с асинхронным двигателем с фазным ротором | 1980 |
|
SU1035766A1 |
Изобретение относится к электротехнике и может быть использовано для привода антенн радиолокационных станций. Целью изобретения является улучшение динамических показателей электропривода за счет увеличения быстродействия и повьшения точности регулирования момента. Указанная цель достигается введением в частотно-регулируемый электропривод блока 16 вычисления момента и второго блока 17 фазных сумматоров. Благодаря этому можно осуществить компенсацию амплитудных и фазных ошибок замкнутых контуров регулирования фазных токов за счет применения скользящих режимов и выбора плоскости переключения в функции вьщ1еуказанных ошибок и их производных. I з.п. ф-лы, 4 ил. Q 
- -WKV Vr fb 1
fi
ЫК„ V
Ч ,л .
(3)
Сигналы компенсации ЭДС вращения имеют вид
K.,
EuiB к
Л-ПЦ
и
kc
we
пч
где Е
ыл
шв
ЕСОСк
пч
составляющие ЭДС, преобразованные из осей of ,. /J к фазщдм координа- там А, В, С} коэффициент пере- дачи преобразовав теля частоты.
Указанные сигналы компенсации формируются с помощью блока 12 и подают- ся на первые входы узлов вьще- ления знака ошибки, на вторые входы которых подаются сигналы ошибки Е, Е„, Ер с выходов блока 14 сумматоров. В основу работы узлов 26-28 выделения знака ошибки заложен следующий алгоритм:
и
W k A
КА
sign
UKB i gnS6; U« siS Sc
КС
где 8д, Sg, S - поверхности переключения, которые определяются следу ющими выражениями:
где 1
i
Л
т «
В
т
с
выходные сигна
лы блока 15 регуляторов фазных токов,
0 По сигналам U, , U ,,(. осуществляется управление преобразователем 3 частоты.
Таким образом, введение в частотно-регулируемый электропривод блока
5 16 вычисления момента и использование его выходного сигнала в контуре обратной связи по моменту, а также блока 17 сумматоров, на входы которых поступают компенсирующие сигналы
0 по ЭДС вращения асинхронного двигателя с блока 12 компенсации, позволяет осуществить компенсацию амплитудных и фазовых ошибок замкнутых контуров регулирования фазных токов за
g счет применения скользящих режимов и выбора плоскости переключения в функции вышеуказанных ошибок и их производных, благодаря чему в сравнении с известным решением обеспечива0 ются более высокие динамические показатели за счет увеличения быстродействия и повышения точности регулирования момента.
5Формулаиз обретения
к 10
15
20
3653358
g узла выделения знака ошибки, а переключающие выводы коммутатора через инвертор и непосредственно получены . к.входам сумматора, выход которого образует соответствующий выход блока
.... компенсации.
oU
25
30
35
40
л.в.с
- J4 I
1
м I
ф1/г.З
|
Фиг.
| Патент США № 4047083, кл | |||
| Способ изготовления фасонных резцов для зуборезных фрез | 1921 |
|
SU318A1 |
| Спежановский 0 | |||
| В | |||
| и др | |||
| Системы подчиненного регулирования электроприводов переменного тока с вентильными преобразователями | |||
| - М.: Энерго- атомиздат, 1983, с | |||
| Плуг с фрезерным барабаном для рыхления пласта | 1922 |
|
SU125A1 |
| Способ сужения чугунных изделий | 1922 |
|
SU38A1 |
