(54) ЭЛЕКТРИЧЕСКИЙ ГЕНЕРАТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| МУЛЬТИСЕНСОР | 1996 |
|
RU2104559C1 |
| РЕЗОНАТОР ЭЛЕКТРОМЕХАНИЧЕСКИЙ | 2006 |
|
RU2302007C1 |
| ДАТЧИК ИНЕРЦИАЛЬНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2119645C1 |
| РЕЗОНАТОР СИЛОЧУВСТВИТЕЛЬНЫЙ | 2006 |
|
RU2329511C2 |
| ДАТЧИК РЕЗОНАТОРНЫЙ | 2009 |
|
RU2415441C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОТРОН | 2008 |
|
RU2403537C2 |
| Микроэлектромеханический первичный преобразователь ускорения | 2017 |
|
RU2657351C1 |
| Вибрационный датчик угловой скорости | 1977 |
|
SU625164A1 |
| СПОСОБ КОРРЕКЦИИ ОРБИТАЛЬНОГО ДВИЖЕНИЯ КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2496688C2 |
| ДАТЧИК ИНЕРЦИАЛЬНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2018133C1 |
Изобретение относится к области электрических генераторов с пьезоэле трическими резонаторами и может быть использовано в качестве.эталонов частоты синхронизирующих сигналов в воздушных или космических транспортных средствах. Известны электрические генераторы содержащие пьезоэлектрические резонаторы 1 . Недостаток их состоит в низкой стабильности частоты электрических колебаний. Известен электрический генератор с последовательной цепью возбуждения колебаний, содержащий емкость, регулирующую частоту колебаний, состоящую по крайней мере из одного переменного конденсатора, одна из пласти которого соединена с выходом цепи, пьезоэлектрический кварцевый резонатор, один из зажимов которого соединен с другой пластиной конденсатора, и усилитель, вход которого связан с другим зажимом резонатора, выход которого связан с выходом последовател ной цепи, и схему согласования по. уровню сигнала колебаний, посылаемого указанной цепью, связанную своим входом с выходом упомянутой цепи 2 Недостатком этого генератора является невысокая стабильность частоты электрических колебаний при действии ускорения. Цель изобретения состоит в повышении стабильности частоты электрических колебаний при действии ускорения. Указанная цель достигается тем, что генератор содержит устройство, чувствительное к ускорению, которому подвергается генератор, механически связанное с неподвижной и подвижной арматурой переменного конденсатора соответственно степени свободы движения; устройство, чувствительное к ускорению, может представлять собой упругий возвратный элемент подвижной арматуры соответственно степени свободы движения; переменный конденсатор может иметь переменное расстояние между пластинами, а упругий возвратный элемент состоять из гибких пластин, которые, закреплены на арматуре, установленной параллельно и с возможностью перемещения в сторону неподвижной арматуры переменного конденсатора.I Кроме того,, в таком генераторе направление движения перемещения подвижной арматуры переменного конденсатора может быть параллельно век тору чувствительности к ускорению . пьезоэлектрического кристалла резо атора, а указанная переменная емкость может состоять из трех переменных конденсаторов, которые содержат .каждый одно устройство, чувствительное к ускорению и к упругому возврату их подвижной арматуры, которые электрически соединены параллельно между собой и последовательно с резонатором, и направления движения перемещения подвижных арматур которых соответственно параллельны трем основным осям пьезоэлектрического кристалла резонатора.
Предлагаенфлй генератор может иметь два варианта исполнения. В первом варианте одна из пластин переменного конденсатора имеет профилированные края между прямыми, перпендикулярными к направлению движения перемещения подвижной пластины, а другая пластина переменного конденсатора имеет прямоугольную поверхность.
Во втором варианте упругий возвратный элемент состоит из гибкой пластины, закрепленной на подвижной арматуре, которая подвижна на постоянном расстоянии от названной неподвижной арматуры и в направлении, параллельном к поверхностям пластин.
По первому и второму вариантам исполнения названные профилированные края определяются каждый следующим отношением профиля Р в зависимости от перемещения и подвижной арматуры
Mu-K) где А - постоянная, зависящая от геометрических и механических параметров названного упругого элемента и названного переменного конденсатора;
К - постоянная, зависящая от названных геометрических и механических параметров, а также от противоположной поверхности названных арматур при нулевом ускорении и других емкостей названного генератора.
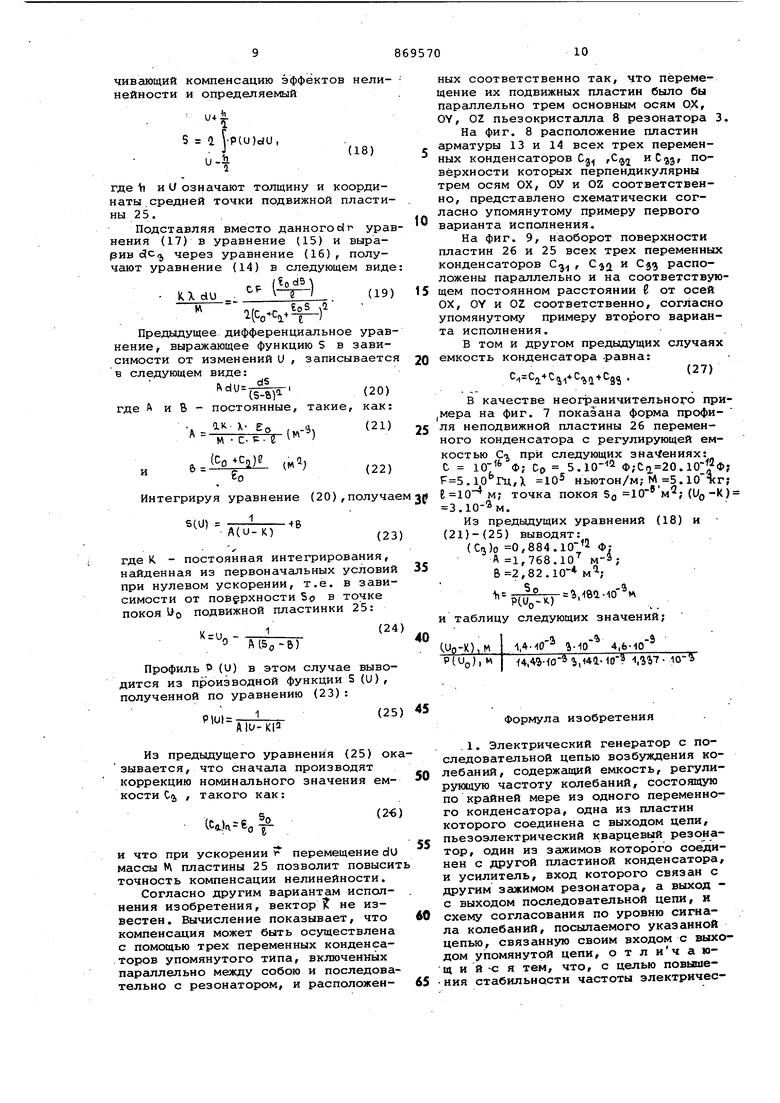
На фиг,1 показана электрическая схема пьезоэлектрического резонатора и его переменной емкости; на фиг.2 пьезоэлектрический кристалл в аксонометрии .и его основные оси; на фиг. 3 - конденсатор, компенсирующий ускорение, согласно первому варианту исполнения, вид справа в полуразрезе на фиг. 4 - то же, вид сверху; на фиг. 5 г схема конденсатора в аксонометрии компенсирующего ускорение, согласно второму варианту исполнения; на фиг. 6 - сечение по передней стороне неподвижной пластины конденсатора, изображенного на фиг. 5; на фиг. 7 показана форма профиля поперечных краев неподвижной пластины; на фиг. 8 показано расположение трех переменных емкостей компенсирухяцего конденсатора согласно первому варианту исполнения, когда вектор чувствительности к ускорению неизвестен; на фиг. 9 - то же, согласно второму варианту исполнения.
Электрический генератор содержит последовательную цепь, состоящую из переменного конденсатора 1, одна из пластин которого соединена с выходом 2 цепи, пьезоэлектрический кварцевый резонатор 3, один из зажимов которого связан с другою пластиной конденсатора 1, и усилитель 4, ввод которого соединен с другим зажимом резонатора, а вывод которого 5 связан с выходом 2 цепи. Схема б, вход которой соединен с выходом 2 цепи, обеспечивает согласование по уровню сигнала колебаний, передаваемого через выход 2 цепи, который она передает через свой выход 7 на другие схемы или органы. Вектор г, показанный в одном из направлений, представляет ускорение, которому подвергается генератор, и целью которого является компенсация явлений посредством автоматического изменения величины емкости С переменного конденсатора 1.
На фиг. 2 показан пьезоэлектрический кристалл 8 резонатора 3 и все три его основные оси, которые обозначены ОХ,ОУ и OZ. Кристалл 8 представляет собою, например, кварц в разрезе AT. Известно, что такой разрез обеспечивает максимальную стабильность частоты и минимальную чувствительность к. изменениям температуры. Чтобы обеспечить максимальный резонанс, грань 9 кристгшла 8 представляет собою шаровой сегмент, выпуклость которого ориентирована в направлении Of.
Экспериментально определяли изменени1Р1 частоты дР таких кварцев в разных направлениях по направлениям их основных осей, изменяя число точек крепления на держателях (не представленных на фиг. 2) при разных величинах ускорения. Выло установлено, что во всех случаях изменение частоты ( герцах) в обе стороны по отношению к номинальной частоте, которая определяется частотой при нулевом ускорении, может быть выражено с помощью следующего уравнения:
,,4К2Гг,(1)
гдег ,rj ,Г2. - соответ ствующие проекг ции вектора ускорения на все три
основные осиОХ ,04 и02;
ttx, К и kz - коэффициенты пропорциональности данного резонатора, которые практически постоянны в данной области величин ускорения.
0 в качестве примера для кварца AT, указанного вьиие, номинальная частота колебаний которого равна 5.10 Гц, бьшо найдено: ., . Кч 10- К; 2.. 1СГ
5 при величинах ускорени } от -50с(до + +50qr. Коэффициентных ,К,К2 вьфажены в герцах на единицу ускорения зе ного притяжения (Гц/с) . Следует заметить, что уравнение (1) является развернутой формой ска лярного произведения: . в котором - вектор ускорения, а К - вектор, выражающий по модулю и направлению чувствительность к ус корению данного резонатора. Следств этого будут выведены в дальнейшем. Обратившись снова . 1, напо ним, как частота колебаний резонато ра 3 может быть скорректирована путем последовательного подключения е кости. Для этого представлена эквивалентная электрическая схема резонатора 3 и структура переменного ко ректирующего конденсатора 1. Последовательная резонансная цепь, состо ящая из сопротивления И , катушки и дуктивности L и конденсатора С , эк вивалентная пьезоэлектрическому кри таллу и конденсатору D о , имеет межд электродами емкость. С - величина е кости конденсатора 1. Следует напомнить, что сдвиг по частоте ЛР , вызванный включением емкости С, выражается следующим уравнением: - l(, в качестве примера для такого кв ца, который уже был рассмотрен и ко торый имеет номинальную частоту колебаний, равную Р 5. Гц, допуст следующие приближенные величины: С 10- Ф R . 100 Ом U 10 Гн to 4. Если величина емкости С выше, ч величина емкости CQ, уравнение (3) становится в первом приближении: Действительно, чтобы обеспечить точную коррекцию частоты,конденсатор 1 емкости С должен по-существу состоять из двух параллельных конден саторов, одного с емкостью С и другого переменного с емкостью С, причем емкость Cf значительно больше емкости С. В этом случае уравнение (4) принимает следующий вид: iL сР 7()(5) а корректирукидая чувствительность становится тогда: dlftF)-uT О d(uPb-dCn,(7) Таким образом, все вышесказанное доказывает пригодность настоящей конструкции: переменного конденсатора, соединенного последовательно с резонатором и средств регулирования емкости этого конденсатора соответственно величине ускорения,для компенсации изменений частоты названного резонатора, вызванных упомянутым ускорением.Можно, например,регулировать геометрический парс1метр в пределах степени свободы движения{поверхность или расстояние между пластинами),который оказывает воздействие на переменную емкость конденсатора соответственно величине сигнала,посылаемого датчиком ускорения.Изобретение предусматривает простое и эффективное решение, кото-рое состоит в возможности подсоединения датчика к переменному конденсатору посредством крепления его подвижной пластины с помощью упругого возвратного органа. Согласно первому, варианту исполнения изобретения, принимая за М массу подвижной пластины и за Х жесткость возвратной пружины, отмечают линейное изменение параметра в зависимости от ускорения. По показателям чувствительности к ускорению и .с целью облегчения изготовления за регулируемый параметр берут расстояние между пластинами. Что касается упругих возвратных средств, то можно, например, применять объем газа, заключенного между пластинами, и герметичную упругую оболочку. Однако значительно проще применять подвеску на упругих пластинах, такую, которая показана на фиг. 3 и 4. Неподвижная арматура 10 конденсатора емкости C.IJ приклеивается на изоляционную основу 11; продолжением которой является плечо 12. Подвижная арматура 13, параллельная арматуре 10, представляет собою пластину из упругого токопроводящёго материала, например, из сплава никеля, продолжением которой служат две пластины 14,. обладающие жесткостью X которые нависают над плечом 12 и в которых выполнены продольные пазы 15. Шлифты 16 зажимают плечи 12 и поддерживают пластины 14 в пазах, в кото{яде они вставляются концами с винтовой нарезкой 17, на которые навинчиBcUOTCH Зсцкимные гайки 18. Пластина 19 из изоляционного материала приклеивается на арматуру 13 и выполняет роль дополнительного груза массы М . Пластины арматуры 10 и 13 соответственно подсоединяются проводниками 20 и 21, проходящими через элементы 11 и 19 к выводам 22 и 23. Переменная емкость Сд, конденсатора, структура которой показана на фиг. 3 и 4, выражается по KJiaccH4ecкой формуле: с ео-ггде 9,Q - диэлектрическая проницаемость вакуума, равная 8,84. S поверхность сопротивления
арматур;
t - асстояние между арматурами, Поскольку механические связи симметричны, S практически не изменяется только И изменяется линейно в зависимости от у ;корения. Если направление вектора V. известно, например, в результате предварительного определения коэффициентов К ) ,К и К. ура в нения (1) получают конденсатор, пластины которого перпендикулярны названному вектору.
По уравнению (8) величина составляющей 7 в направлении К такова, что она вызывает изменение М расстояния t и приводит к изменению емкости ; г
ac.-t- (9)
и cJCj -cie(10)
Но при данной массе груза 19 (масса пластины 13 не принимается во внимание) и данной жесткости X гибких пружин, состоящих из пластин 14:
, (11)
откуда dCnj-v-r(12)
таким образом, сравнивая уравнения (7) и (12), видим, что:
d(uP)--olC -r (13)
Следовательно, можно получить с помощью переменного конденсатора на упругой подвеске (фиг. 3 и 4), определив соответственно его геометрические и механические параметры (расстояние между арматурами, поверхность соприкосновения, жесткость- пластин), за счет конструкции или регулирующих органов (не представленных на фиг.З и 4) практически точную компенсацию сдвига по частоте, вызываемого ускорения, воздействукндими на генератор.
Согласно второму варианту исполнения изобретения, компенсации сдвига по частоте, вызываемого ускорением, которому подвергается генератор, абсолютно точная.
Из уравнения (5) выводят чувствительность коррекции
d( (14)
1WVV
а также из уравнения (2):
«fuP)cl(K-r))
Из двух предыдущих уравнений следует, что компенсация акселерометрических эффектов переменной емкостью Cej является не чисто линейной в связи с нелинейностью в зависимости от Ci в знаменателе уравнения (14). Таким образом закон общего изменения зависит, с одной стороны, от закона изменения частоты в зависимости от емкости С переменного конденсатора 1 и, с другой стороны, от закона изменения е(4кости С в зависимости от ускорения.
Как уже говорилось, этот последний закон зависит по существу от геометрических параметров, а именно от расстояния Z и поверхности S арматур емкости С , который выводится из уравнения (8). Отсюда выводится изменение емкости:
dCj c 5-€oS (16)
Аналогично первому варианту, из соображений облегчения изготовления, принимают во внимание только один параметр 2 или S , изменение которого (нелинейное) корректирует форму электродов емкости Cj с целью точной компенсации линейного изменения отклонения по частоте резонатора, вызываемого ускорением .
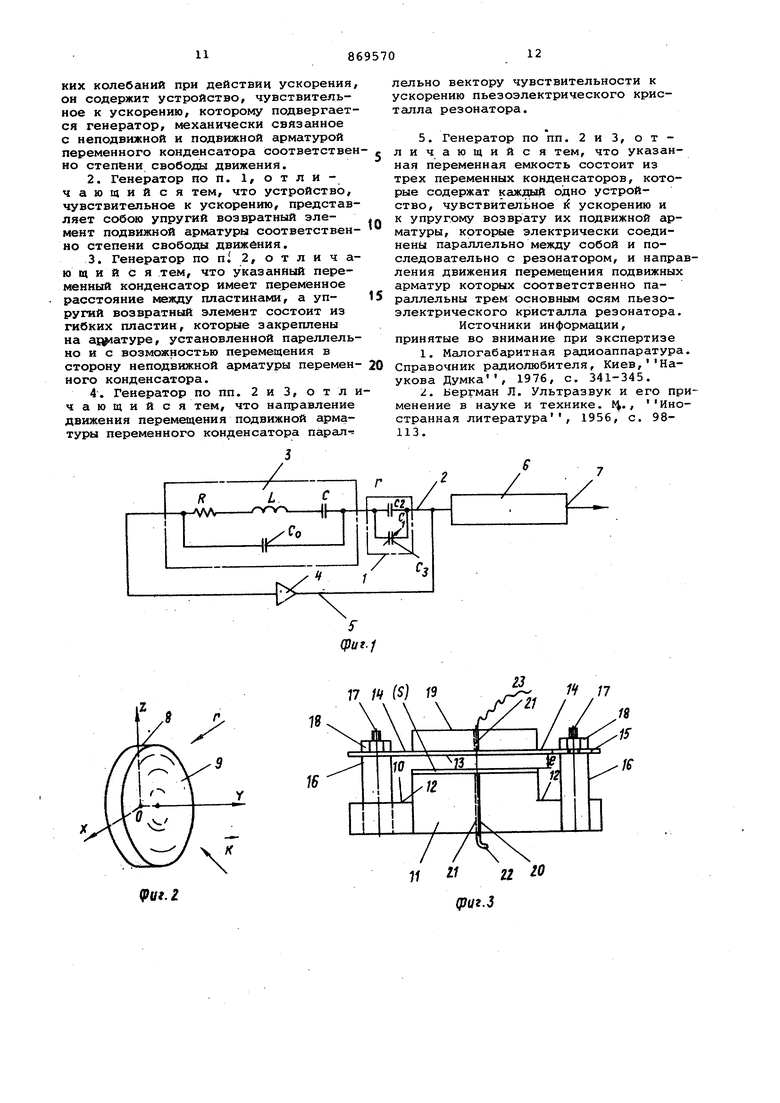
Согласно второму варианту исполнения, представленному на фиг. 5, емкость 0) изменяется в зависимости от поверхности S с помощью гибкой пластины 24, один из концов которой жестко закреплен, между тем как другой конец крепится продольно к одной из арматур 25 конденсатора емкости Сч, Эта подвижная арматура 25 прямоугольной параллелепипедной формы имеет при постоянном расстоянии Е проектируемую часть S своей поверхности, находящуюся против другой неподвижной арматруры 26. Арматура 26 профиль Р (U) на каждом из своих поперечных краев, симметричных по отношению к средней поперечной плоскости подвижной арматуры 25, форма которой позволяет компенсировать эффект нелинейности.
Неподвижная пластина 26 изолирована от подвижной пластины 25 и подвижная пластина 25 накладывается на пластину 24 с помощью системы крепления, например, аналогичной системе описанной по первому варианту исполнения, представленному на фиг. 3 (элементы 12,15,17 и 18).
На фиг. 6 изображен контур поверхности неподвижной пластины 26, ограниченный поперечными краями профилей Р(и), симметричных по отношению к оси Ои, перпендикулярной к шастине 24 и параллельной вектору К чувствительности к ускорению, направление которого предполагается известным. В этом случае, обозначив через массу подвижной арматуры 25, выполняющую функцию груза, и через составляющую вектора ускорения г согласно направлению К , основное уравнение динамики относительно малого перемещения арматуры 25 в направлении (или Ои) приводит к следующему уравнению:
.
(17)
где - коэффициент жесткости пластины 24 (кг/с )
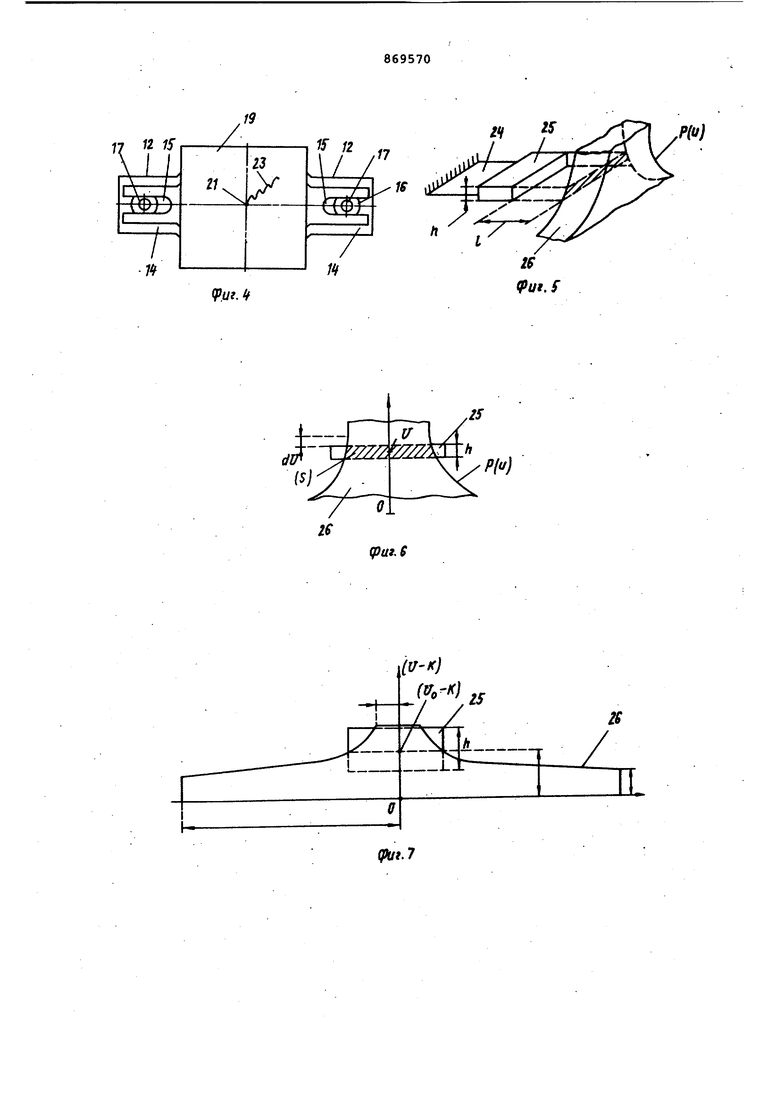
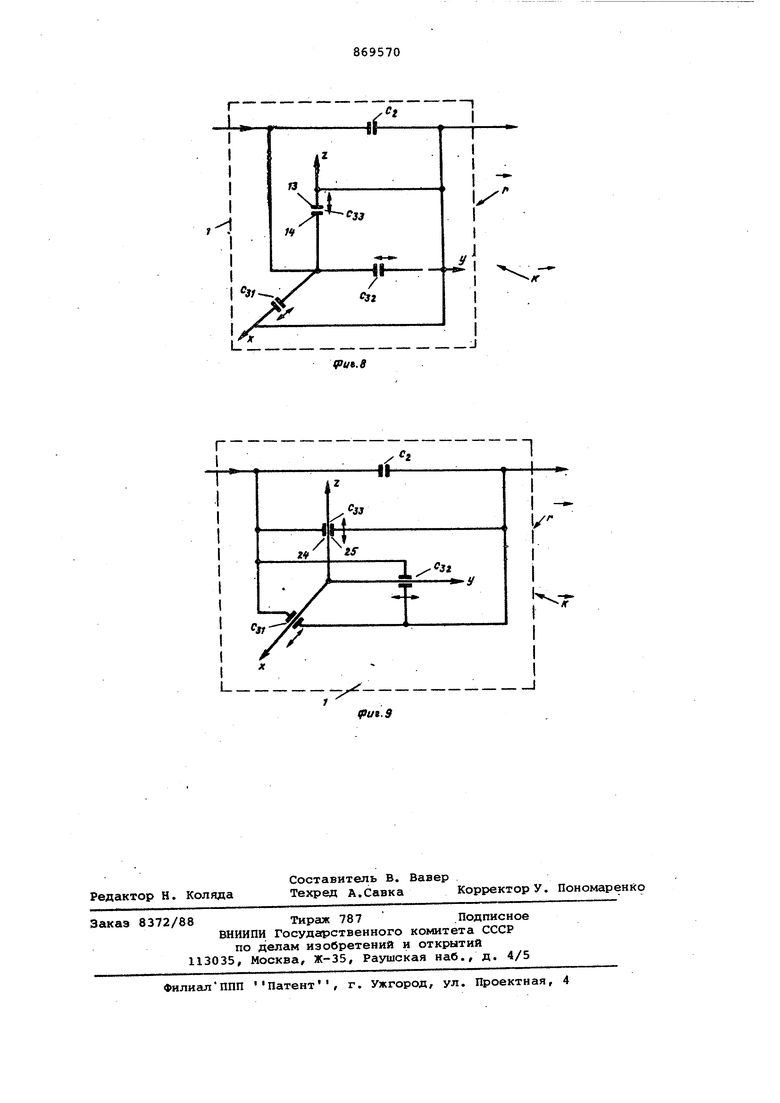
Из уравнений (14) и (17) теперь можно вывести профиль Р (и), обеспечивающий компенсацию эффектов нелинейности и определяемый 1 ypi(j)du, uгде иU означают толщину и координаты средней точки подвижной пласти ны 25. Подставляя вместо данногоd г ура нения (17) в уравнение (15) и вырарив (Зсч, через уравнение (16) , получают уравнение (14) в следующем вид гр (Iod5 КХ dU . (19 ilvvif-f Предыдущее дифференциальное урав нение, выражающее функцию 5 в зависимости от изменений U , записываетс в следующем виде: (20) и В - постоянные, такие, как: ак. х- ЕС Интегрируя уравнение (20),получа А(и-К) где К. - постоянная интегрирования, найденная из первоначальных условий при нулевом ускорении, т.е. в зависимости от поверхности So в точке покоя Уо подвижной пластинки 25: и (2 ° AlSo-B) Профиль Р (и) в этом случае выводится из производной функции S (и), полученной по уравнению (23): A1U-K12 Из предыдущего уравнения (25) ок зывается, что сначала производят коррекцию номинального значения емкости СJ , такого как: CCa.W 6oTи что при ускорении перемещение dU массы М пластины 25 позволит повыси точность компенсации нелинейности. Согласно другим вариантам исполнения изобретения, вектор )t не известен. Вычисление показывает, что компенсация может быть осуществлена с помощью трех переменных конденса.торов упомянутого типа, включенных параллельно между собою и последовательно с резонатором, и расположенных соответственно так, что перемещение их подвижных пластин было бы параллельно трем основным осям ОХ, OY, OZ пьезокристалла 8 резонатора 3. На фиг. 8 расположение пластин арматуры 13 и 14 всех трех переменных конденсаторов Cj , иСзз ° вёрхности которых перпендикулярны трем осям ОХ, ОУ и OZ соответственно, представлено схематически согласно упомянутому примеру первого варианта исполнения. На фиг. 9, наоборот поверхности пластин 26 и 25 всех трех переменных конденсаторов С , Cj/i и Cj расположены параллельно и на соответствующем постоянном расстоянии S от осей ОХ, OY и OZ соответственно, согласно упомянутому примеру второго варианта исполнения. В том и другом предыдущих случаях емкость конденсатора -равна: в качестве неограничительного приМера на фиг. 7 показана форма профиля неподвижной пластины 26 переменного конденсатора с регулирующей емкостью C-j при следующих значениях: t icr ф; DO 5.10- Ф;Сг.20.. .10Гц,Х 10 ньютон/м;М,5. м; точка покоя SQ (U,,-К) 3.. Из предЕлдущих уравнений (18) и (21)-(25) выводят: (0)0 0,884. Ф: А 1,768.10 м-4; ,82.10 ,18а-1о л PWo-) таблицу следующих значений; 1,4. 4,6--10 (.Оо-Х),М ),M н, . 0 Формула изобретения .1. Электрический генератор с последовательной цепью возбуждения колебаний, содержащий емкость, регулирующую частоту колебаний, состоящую по крайней мере из одного переменного конденсатора, одна из пластин которого соединена с выходом цепи, пьезоэлектрический кварцевый pe3Ojiaтор, один из зажимов которого соединен с другой пластиной конденсатора, и усилитель, вход которого связан с другим зажимом резонатора, а выход с выходом последовательной цепи, и схему согласования по уровню сигнала колебаний, посылаемого указанной цепью, связанную своим входом с выходом упомянутой цепи, о т л ич а ющ и и -с я тем, что, с целью повышения стабильности частоты электрических колебаний при действии ускорения, он содержит устройство, чувствительное к ускорению, которому подвергается генератор, механически связанное с неподвижной и подвижной арматурой переменного конденсатора соответственно степени свободы движения.
на аЕ)атуре, установленной пареллельно и с возможностью перемещения в сторону неподвижной арматуры переменного конденсатора.
лельно вектору чувствительности к ускорению пьезоэлектрического кристалла резонатора.
Источники информации, принятые во внимание при экспертизе
. ьергман Л. Ультразвук и его прменение в науке и технике. 1., Иностранная литература , 1956, с. 98113.
(Put.j
(Риг. 2
17 14 (S) 19
If 17
I /V
n гг п го
(риг.З
,/
V.ut.
гн f
Г
