Изобретение относится к гироскопическим приборам, служащим в качестве чувствительных элементов в системах управления и навигации различных объектов.
Известен датчик угловой скорости с двухрамочной конструктивной схемой, первая, внешняя, рамка которой крепится к корпусу прибора с помощью упругого подвеса Гука, состоящего из двух идентичных элементов, имеющих общую ось симметрии, а вторая, внутренняя, рамка, расположенная симметрично по отношению к первой, крепится к ней посредством аналогичного упругого подвеса с осью симметрии последнего, ортогональной оси внешнего упругого подвеса (US 4598585, 1984).
Особенностью такой конструктивной схемы является то, что внутренняя рамка (плата) несет на себе «тяжелый» груз определенной формы, почему двухрамочная конструктивная схема (ДКС) называется еще «схемой с центральной массой», которая имеет следующие недостатки:
- необходимость использования для увеличения моментов инерции груза по осям его колебаний «тяжелых», как правило, драгоценных металлов (золото), что удорожает конструкцию и усложняет технологию производства;
- заметное влияние на точность прибора линейных ускорений при малейшей разбалансировке груза относительно осей обеих рамок;
- «малую» крутизну емкости датчиков момента и «малый» масштабный коэффициент емкостных датчиков угла обеих рамок, что обусловлено сравнительной малостью площадей пластин раздельно выполненных электродов, смонтированных на корпусе;
- ограничение точности чувствительного элемента (ЧЭ) с ДКС из-за наличия перекрестных связей между обеими парциальными колебательными подсистемами прибора.
Существуют способы частичного устранения части указанных выше недостатков, например решение по патенту RU 2098761, однако это связано с усложнением конструкции и удорожанием технологии изготовления прототипа, что повышает себестоимость прибора.
Электростатический гиротрон (ЭГТ) представляет собой командный гироскопический чувствительный элемент, совмещающий в себе функции однокомпонентного ДУС и двухкомпонентного акселерометра. Рассматриваемая здесь модель гиротрона имеет свои принципиальные отличия, которые заключаются в том, что многие качества прибора дополнительно приобретаются благодаря методам, развитым и испытанным в ходе разработок электростатического гироскопа - акселерометра [2], поэтому данный чувствительный элемент и называется электростатическим гиротроном.
Именно благодаря приемам электростатической коррекции динамических характеристик чувствительный элемент данного типа может быть использован в различных областях. При этом в зависимости от условий решаемой навигационной задачи варьированию подлежат только количественные характеристики части блоков сервисной электроники.
Задачей, на решение которой направлено предлагаемое изобретение, является повышение точности и снижение себестоимости ДУС, а также совмещение их прямых функций с функциями линейных акселерометров. Решение поставленной задачи может быть найдено с применением прибора - электростатический гиротрон.
Рассматриваемый электростатический гиротрон, кроме электростатической коррекции, имеет еще целый ряд особенностей, которые значительно улучшают его тактико-технические и стоимостные характеристики, такие как:
- простота и технологичность конструкции;
- совмещение одними и теми же элементами конструкции чувствительного элемента различных функций;
- отказ от использования в конструкции чувствительного элемента специальных систем вакуумирования;
- высокая перегрузочная способность;
- совмещение одним чувствительным элементом функций однокомпонентного ДУС и двухкомпонентного акселерометра;
- строго линейная зависимость между величинами входного воздействия - угловой скоростью основания чувствительного элемента и адекватными величинами выходного сигнала;
- значительная величина диапазона измерения входной величины.
Технический результат достигается за счет того, что в электростатическом гиротроне, представляющем собой командный гироскопический чувствительный элемент, совмещающий функции однокомпонентного датчика угловой скорости с функциями двухкомпонентного датчика линейных ускорений, содержащий герметичный кожух, служащий одновременно магнитным экраном, который охватывает выполненный из диэлектрика корпус, объединяющий воедино два симметричных цилиндрических полукорпуса, на внутренних поверхностях торцов которых смонтировано по четыре электрода на каждом, причем оба полукорпуса крепятся к стальной круглой упругой пластине, разделенной узкими кольцевыми разрезами на три части: плату, рамку и пристыковочный фланец, связанные воедино четырьмя упругими элементами, например торсионами, таким образом, что общие оси симметрии пар торсионов, лежащие в одной плоскости и связывающие попарно плату и рамку, рамку и пристыковочный фланец, ортогональны между собой, в центре платы выполнено отверстие для крепления осесимметричной галтели, и сервисную электронику, имеющую датчики угла амплитудного типа, при этом площадь каждого из электродов максимальна, а электрическая схема прибора основана на принципе частотного разделения сигналов, поступающих на электроды от блоков сервисной электроники, что к тому же дает возможность обратить электроды совместно с ответными частями поверхностей рамки и платы, гальванически связанных в пары, в переменные емкости, которые одновременно выполняют функции исполнительных органов датчиков момента и сенсорных органов емкостных датчиков углов поворота гантели вокруг осей торсионов, при этом датчики угла снабжены преобразователями их выходных сигналов в кодовую форму и процессором, формирующим в цифровом виде отношение величины амплитуды колебаний рамки к величине амплитуды колебаний платы - колебаний, происходящих на частоте, задаваемой генератором возбуждения колебаний платы, что эквивалентно определению в рад/с величины модуля проекции входной угловой скорости на ось чувствительности датчика угловой скорости.
Кроме этого, целесообразно, чтобы гантель, прикрепленная к плате в центре ее симметрии, была бы установлена с возможностью дисбаланса вдоль оси ее собственной симметрии и обеспечения в каналах управления датчиками момента появления низкочастотных сигналов в форме напряжения, а при наличии у вектора кажущегося ускорения датчика угловой скорости отличной от нуля компоненты ортогональной оси его чувствительности, при этом величины низкочастотных сигналов прямо пропорциональны величинам ортогональных между собою и оси чувствительности датчика угловой скорости, компонентам вектора кажущегося ускорения, что при измерении величин указанных напряжений позволяет вычислить по результатам калибровки прибора указанные компоненты вектора кажущегося ускорения.
Принятые в описании и на чертежах обозначения:
БСЭ - блок сервисной электроники,
ВИП - вторичный источник питания,
ВЭ - виброэлемент,
ГВ - генератор возбуждения,
ГНЧ - генератор несущей частоты,
ДфУ - дифференциальный усилитель,
ДМХ - датчик момента канала X,
ДМУ - датчик момента канала Y,
ДУХ - датчик угла поворота рамки вокруг оси X,
ДУУ - датчик угла поворота рамки вокруг оси Y,
ДУС - датчик угловой скорости,
КУ - корректирующий усилитель,
МИСх - мостовая измерительная схема канала X,
МИСу - мостовая измерительная схема канала Y,
ОТ - общая точка,
ЭМУ - электромеханическое устройство,
ПСβ - парциальная подсистема ЭМУ, колеблющаяся вокруг оси Х с поворотом гантели на угол β,
ПСγ - парциальная подсистема ЭМУ, колеблющаяся вокруг оси Y с поворотом гантели на угол γ,
РН - регулятор напряжения,
СД - синхронный детектор,
ТТХ - тактико-технические требования,
ЧЭ - чувствительный элемент,
УПТ - усилитель переменного тока,
УМ - усилитель мощности,
ФНЧ - фильтр низкой частоты,
ЭГТ - электростатический гиротрон,
ЭБх - электронный блок канала X,
ЭБу - электронный блок канала Y,
ЭСГ - электростатический гироскоп,
ЭСК - электроника системы коррекции.
По принципу действия электростатический гиротрон может быть классифицирован как тип резонансно-измерительных приборов, которые, как известно [3], предназначены для определения только амплитуды или только частоты какой-либо одной моды из состава некоего сложного колебания, которое представляет собой входное воздействие.
Кинематика электростатического гиротрона и принцип действия позволяют также считать его ДУС вибрационного типа.
Сущность изобретения поясняется чертежами, где
на фиг.1 изображен гиротрон в разрезе;
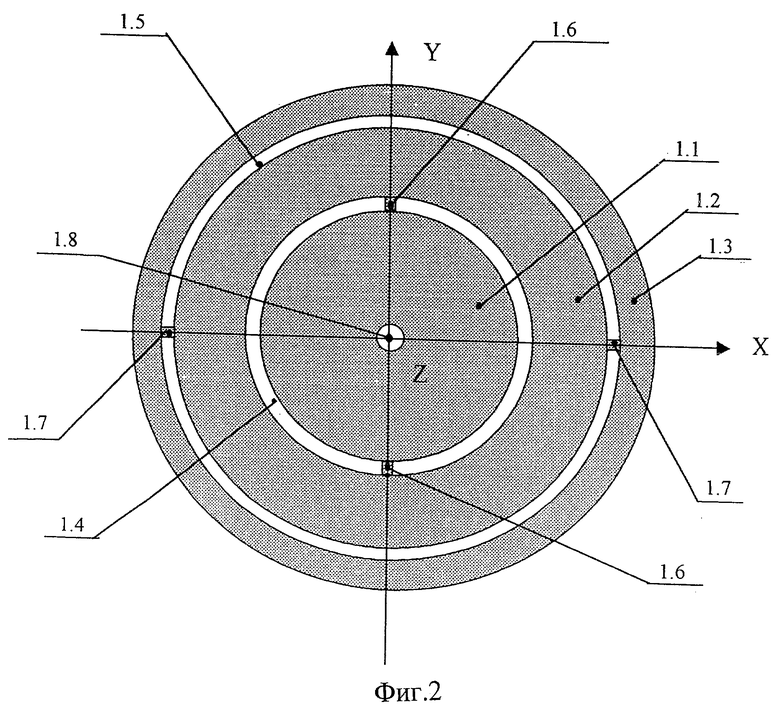
на фиг.2 - пластина виброэлемента;
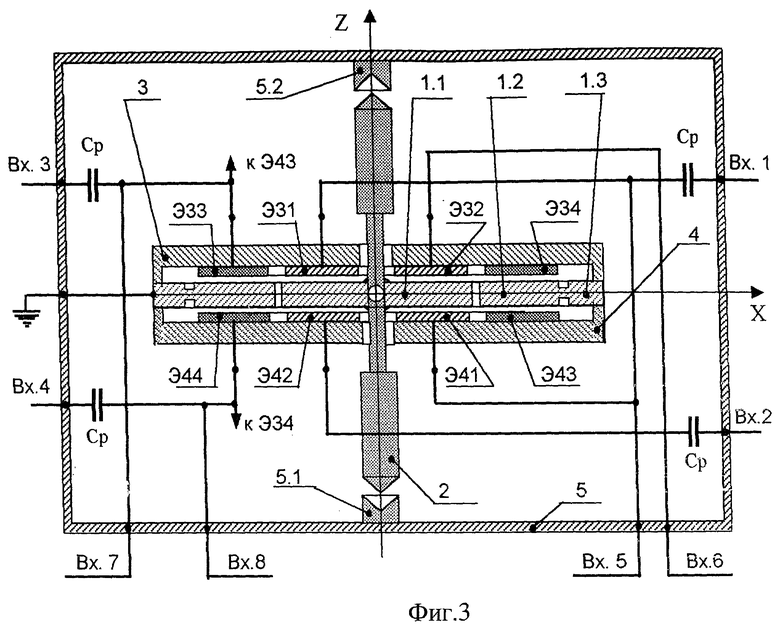
на фиг.3 - конструктивно-функциональная схема электромеханического устройства гиротрона;
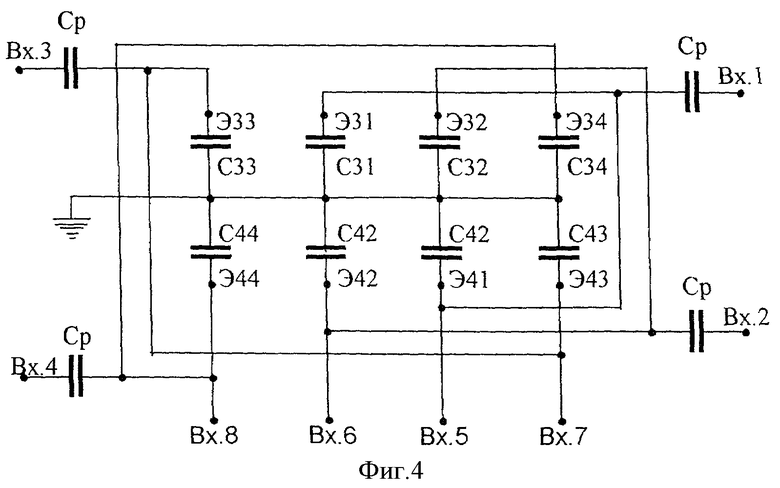
на фиг.4 - электрическая схема гиротрона;
на фиг.5 - схема размещения электродов Э41-Э44 на полукорпусе 4;
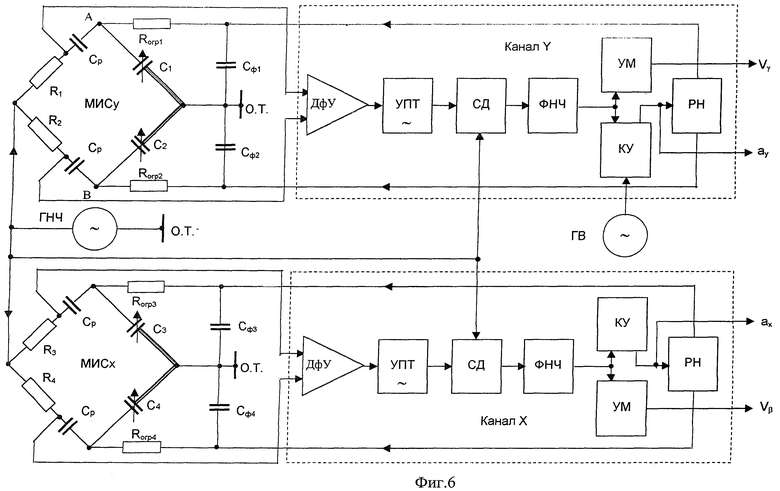
на фиг.6 - схема электрических соединений элементов МИСх и МИСу.
Базовым элементом конструкции гиротрона является пластина 1 из пружинной стали, в центре которой симметрично расположена и жестко с ней связана относительно массивная гантель 2 из немагнитной стали (фиг.1-3). Пластина 1 выполнена стальной, круглой и упругой.
Форму пластины 1 и положение осей неподвижной относительно корпуса ЭМУ декартовой правовинтовой системы координат OXYZ поясняют те же чертежи.
Как показано на фиг.2, пластина 1 условно может быть подразделена на следующие функциональные элементы:
- плата 1.1;
- рамка 1.2;
- пристыковочный фланец 1.3.
Эти три элемента пластины 1, с одной стороны, разделены между собой кольцевыми разрезами 1.4 и 1.5, а с другой - связаны воедино упругими элементами 1.6 и 1.7, допускающими относительное вращение платы 1.1 на малый угол γ вокруг оси Y и вращение рамки 1.2 на малый угол β вокруг оси X.
Отверстие 1.8, выполненное в центре платы 1.1, служит для жесткого крепления на ней гантели 2.
Пластина 1 вместе с гантелью 2 образуют вибрационный элемент (ВЭ) электромеханического устройства.
Пристыковочный фланец 1.3 объединяет в единый блок два полукорпуса электромеханического устройства.
На каждом из полукорпусов 3 и 4, изготовленных из одного и того же диэлектрического материала (керамика, стекло, ситалл), размещены две группы электродов: соответственно Э31, Э32, Э33, Э34 и Э41, Э42, Э43, Э44.
Совместно с ответными им частями поверхностей платы 1.1 и рамки 1.2 ВЭ все электроды, гальванически связанные в пары (см. фиг.3), одновременно выполняют функции:
- переменных конденсаторов Cik (i=3,4; k=1, 2, 3, 4), которые являются сенсорами датчика угла поворота β вокруг оси Х (ДУХ) и датчика угла поворота γ вокруг оси Y (ДУγ);
- исполнительных органов датчиков моментов (ДМХ и ДМУ) по осям Х и Y соответственно.
Форма рабочих поверхностей электродов Э41, Э42, Э43, Э44 на полукорпусе 4 представлена на фиг.5.
Электроды группы Э31-Э34, размещенные на полукорпусе 3, в сборе представляют собой зеркальное отображение электродов группы Э41-Э44 на полукольце 4.
С полукорпусами 3 и 4, а значит и с пристыковочным фланцем 1.3, жестко связан герметичный кожух 5, дополнительно выполняющий функцию магнитного экрана. Кожух 5 несет на себе детали арретира - упоры 5.1 и 5.2 (фиг.3).
Кроме вышеуказанных и показанных на фиг.1-6 элементов электромеханического устройства в него или в автономные блоки его сервисной электроники (последнее зависит от выбранного варианта компоновки прибора) дополнительно входят:
- фильтрующие конденсаторы Сф;
- мостовые резисторы R1-R4;
- ограничительные резисторы Rогр1 - Рогр4;
- герметичные вводы.
Пара переменных конденсаторов С1=С31+С41 и С2=С32+С42 (фиг.4 и фиг.6) совместно с парой разделительных конденсаторов Ср, резисторами Ri, R2, Rогр1, Rогр2 и фильтрующими конденсаторами Сф, Сф2 образуют мостовую измерительную схему (МИСу).
Пара переменных конденсаторов С3=С33+С43 и С4=С34+С44 совместно с парой разделительных конденсаторов Ср, резисторами R3, R4, Rогр3, Rогр4 и фильтрующими конденсаторами Сф3, Сф4 образуют мостовую измерительную схему (МИСх).
Схема электрических соединений элементов МИСх, МИСу представлена на фиг.6.
Следует отметить, что наличие разделительных конденсаторов позволяет подавать на электроды Э31-Э44 (см. фиг.3 и фиг.4) одновременно сравнительно низковольтное, но высокочастотное напряжение и относительно высоковольтное, но низкочастотное, напряжение, что является необходимым условием для совмещения этими элементами функций сенсоров ДУ (переменных конденсаторов МИС) и силовых элементов датчиков момента (ДМ).
Амплитудного типа емкостные датчики угла (ДУ) снабжены преобразователями их выходных сигналов в кодовую форму и процессором, который выдает в цифровом виде отношение величины амплитуды колебаний рамки 1.2 к величине амплитуды колебаний платы 1.1 - колебаний, происходящих на частоте, задаваемой генератором возбуждения колебаний платы 1.1, что эквивалентно определению в рад/с величины модуля проекции входной угловой скорости на ось чувствительности датчика угловой скорости.
Гантель 2, прикрепленная к плате 1.1 в центре ее симметрии, установлена с возможностью дисбаланса вдоль оси ее собственной симметрии и обеспечения в каналах управления датчиками момента появления низкочастотных сигналов в форме напряжения, а при наличии у вектора кажущегося ускорения датчика угловой скорости отличной от нуля компоненты ортогональной оси его чувствительности, при этом величины низкочастотных сигналов прямо пропорциональны величинам ортогональных между собою и оси чувствительности датчика угловой скорости, компонентам вектора кажущегося ускорения, что при измерении величин указанных напряжений позволяет вычислить по результатам калибровки прибора указанные компоненты вектора кажущегося ускорения.
Принцип действия гиротрона заключается в следующем.
После подачи сформированного напряжения на электроды Э31-Э44 гиротрон (ЭГТ) автоматически юстируется, т.е. автоматически приводятся в "О" его датчики угла ДУХ и ДУУ.
Одновременно под действием гармонически изменяющегося во времени t с круговой частой ω напряжения, вырабатываемого генератором возбуждения (ГВ), в пределах малого угла ±γ0 начинает колебаться плата 1.1 с гантелью 2 вокруг оси Y. Если при этом ЭГТ испытывает входное угловое воздействие Ωz (Ωz - проекция угловой скорости основания ЭГТ на его ось чувствительности ДУС - ось Z), то на ЭМУ начинают действовать гармонически изменяющиеся во времени с круговой частотой ω силы Кориолиса (гироскопический эффект). Последние порождают гармонически меняющиеся с той же частотой моменты, направленные как по оси X, так и по оси Y. Под их действием рамка 1.2 начинает колебаться вокруг оси Х в пределах малого угла ±β0, что регистрирует ДУX.
Амплитуды сигналов Vx и Vy на выходах сервисной электроники каналов Х и Y соответственно содержат информацию о величине входного воздействия Ωz. Знак входного воздействия Ωz определяется путем сравнения фаз выходных сигналов ДУХ или ДУУ с фазой генератора возбуждения. Данная схема измерения требует наличия высокоточной сервисной электроники и алгоритмической компенсации перекрестных связей.
Снизить требования к сервисной электронике и упростить алгоритмы компенсации перекрестных связей (а возможно, и полностью исключить их влияние) возможно при "заневоливании" рамки 1.2 отрицательной обратной связью. В этом случае оценивать величину входного воздействия Ωz можно будет с относительно высокой точностью, измеряя величину и знак управляющего напряжения на ДМХ в цепи обратной связи.
Если теперь рассматривать работу ЭГТ с позиций кинематики, то движение ЭМУ можно охарактеризовать как колебания в сложной системе с двумя степенями свободы, которым соответствуют угловые координаты β и γ.
С целью анализа этой сложной системы двухстепенная колебательная система ЭМУ подразделяется на две парциальные подсистемы, которые условно обозначены как ПСβ и ПСγ.
Структурно ПСβ включает в себя как ингредиенты:
- плату 1.1;
- рамку 1.2;
- гантель 2;
- пару упругих элементов 1.7 с суммарной угловой жесткостью Кβ. Коэффициент демпфирования колебаний в системе ПСβ обозначается через χβ, ее добротность - через Qβ, совокупный момент инерции подсистемы относительно оси Х - через Iβ.
В состав ПСγ входят:
- плата 1.1;
- гантель 2;
- пара упругих элементов 1.6 с суммарной угловой жесткостью Кγ.
Коэффициент демпфирования колебаний в системе ПСγ обозначается через χγ, ее добротность - через Qγ, совокупный момент инерции подсистемы относительно оси Y - через Iγ.
Демпфирование в обеих парциальных подсистемах объясняется работой сил вязкого трения, возникающих в материале упругих элементов 1.6, 1.7 и порождаемых воздействием газовой среды в объеме кожуха 5 на колеблющиеся детали ЭМУ.
Конструктивные параметры ЭГТ и параметры цепей их электростатической коррекции подобраны с таким расчетом, чтобы уравнять собственные круговые частоты ωβ и ωγ подсистем ПСβ и ПСγ, поэтому в дальнейшем считается выполненным соотношение:
ωβ=ωγ=ω.
На том же основании можно полагать приблизительно выполненными равенства:
χβ=χγ=χ; Qβ=Qγ=Q.
По соображениям сходства данной системы с другими известными колебательными системами, например камертонами [3], колеблющимися в воздухе, возможно считать, что Q≤3·103.
В рассматриваемом случае обе парциальные подсистемы в силу особенностей конструкции ЭГТ и принципа его действия следует рассматривать как такие линейные колебательные системы, которые возбуждаются гармонически изменяющимися во времени t с круговой частотой ω моментами.
Источники информации
1. И.А.Горенштейн и др. Инерционная навигация, Сов. радио, М., 1962.
2. О.Ф.Орлов и др. Электростатический гироскоп-акселерометр, журнал "Космический бюллетень", т.2, №4, 1995.
3. С.П.Стрелков. Введение в теорию колебаний, Техтеорлит, М., 1953.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПЛАТФОРМЕННЫЙ ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 2000 |
|
RU2162203C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2008 |
|
RU2364836C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2002 |
|
RU2219495C1 |
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| Бесплатформенный инерциальный измерительный блок | 2023 |
|
RU2797150C1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2239159C1 |
| СПОСОБ СБОРКИ ГИРОСКОПОВ И ВИБРАЦИОННЫЙ ГИРОСКОП | 2007 |
|
RU2334946C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ И ВИБРАЦИОННЫЙ ГИРОСКОП ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2334197C1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2241957C1 |

Изобретение относится к гироскопическим приборам, служащим в качестве чувствительных элементов в системах управления и навигации различных объектов. Электростатический гиротрон представляет собой командный гироскопический чувствительный элемент, совмещающий функции однокомпонентного датчика угловой скорости (ДУС) с функциями двухкомпонентного датчика линейных ускорений, и содержит герметичный кожух, служащий одновременно магнитным экраном, который охватывает выполненный из диэлектрика корпус, объединяющий воедино два симметричных цилиндрических полукорпуса, на внутренних поверхностях торцов которых смонтировано по четыре электрода соответствующей формы на каждом. Оба полукорпуса крепятся к стальной круглой упругой пластине, разделенной узкими кольцевыми разрезами на три части: плату, рамку и пристыковочный фланец, связанные воедино четырьмя упругими элементами так, что общие оси симметрии пар торсионов, лежащие в одной плоскости и связывающие попарно плату и рамку, рамку и пристыковочный фланец, ортогональны между собой. В центре платы выполнено отверстие для крепления осесимметричной гантели. Площадь каждого электрода максимальна, а электрическая схема прибора базируется на принципе частотного разделения сигналов. Изобретение позволяет повысить точность и снизить себестоимость ДУС. 1 з.п. ф-лы, 6 ил.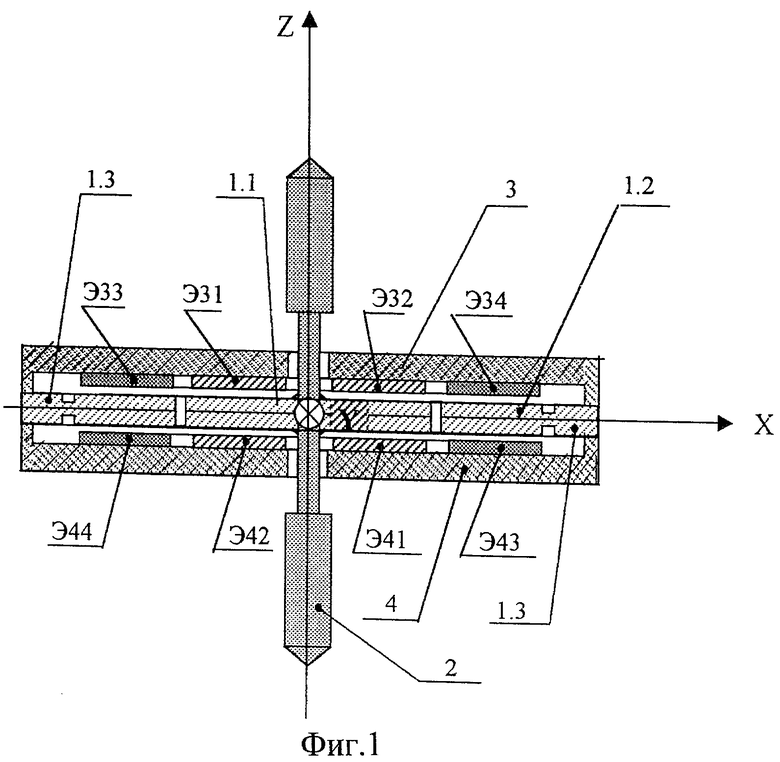
1. Электростатический гиротрон, представляющий собой командный гироскопический чувствительный элемент, совмещающий функции однокомпонентного датчика угловой скорости с функциями двухкомпонентного датчика линейных ускорений, содержащий герметичный кожух, служащий одновременно магнитным экраном, который охватывает выполненный из диэлектрика корпус, объединяющий воедино два симметричных цилиндрических полукорпуса, на внутренних поверхностях торцов которых смонтировано по четыре электрода на каждом, причем оба полукорпуса крепятся к стальной круглой упругой пластине, разделенной узкими кольцевыми разрезами на три части: плату, рамку и пристыковочный фланец, связанные воедино четырьмя упругими элементами, например, торсионами, таким образом, что общие оси симметрии пар торсионов, лежащие в одной плоскости и связывающие попарно плату и рамку, рамку и пристыковочный фланец, ортогональны между собой, в центре платы выполнено отверстие для крепления осесимметричной гантели, и сервисную электронику, имеющие датчики угла амплитудного типа, отличающийся тем, что площадь каждого из электродов максимальна, а электрическая схема прибора базируется на принципе частотного разделения сигналов, поступающих на электроды от блоков сервисной электроники, что к тому же дает возможность обратить электроды совместно с ответными частями поверхностей рамки и платы, гальванически связанных в пары, в переменные емкости, которые одновременно выполняют функции исполнительных органов датчиков момента и сенсорных органов емкостных датчиков углов поворота гантели вокруг осей торсионов, при этом датчики угла снабжены преобразователями их выходных сигналов в кодовую форму и процессором, формирующим в цифровом виде отношение величины амплитуды колебаний рамки к величине амплитуды колебаний платы - колебаний, происходящих на частоте, задаваемой генератором возбуждения колебаний платы, что эквивалентно определению в рад/сек величины модуля проекции входной угловой скорости на ось чувствительности датчика угловой скорости.
2. Гиротрон по п.1, отличающийся тем, что гантель, прикрепленная к плате в центре ее симметрии, установлена с возможностью дисбаланса вдоль оси ее собственной симметрии и обеспечения в каналах управления датчиками момента появления низкочастотных сигналов в форме напряжения, а при наличии у вектора кажущегося ускорения датчика угловой скорости отличной от нуля компоненты ортогональной оси его чувствительности, при этом величины низкочастотных сигналов прямо пропорциональны величинам ортогональных между собою и оси чувствительности датчика угловой скорости, компонентам вектора кажущегося ускорения, что при измерении величин указанных напряжений позволяет вычислить по результатам калибровки прибора указанные компоненты вектора кажущегося ускорения.
| ВИБРАЦИОННЫЙ ГИРОСКОП | 1993 |
|
RU2098761C1 |
| US 4598585 A, 08.07.1986 | |||
| RU 2073209 C1, 10.02.1997 | |||
| ИНТЕГРАЛЬНЫЙ МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП-АКСЕЛЕРОМЕТР | 2005 |
|
RU2293338C1 |
| US 6308567 A, 30.10.2001 | |||
| JP 2008128879 A, 05.06.2008. | |||

