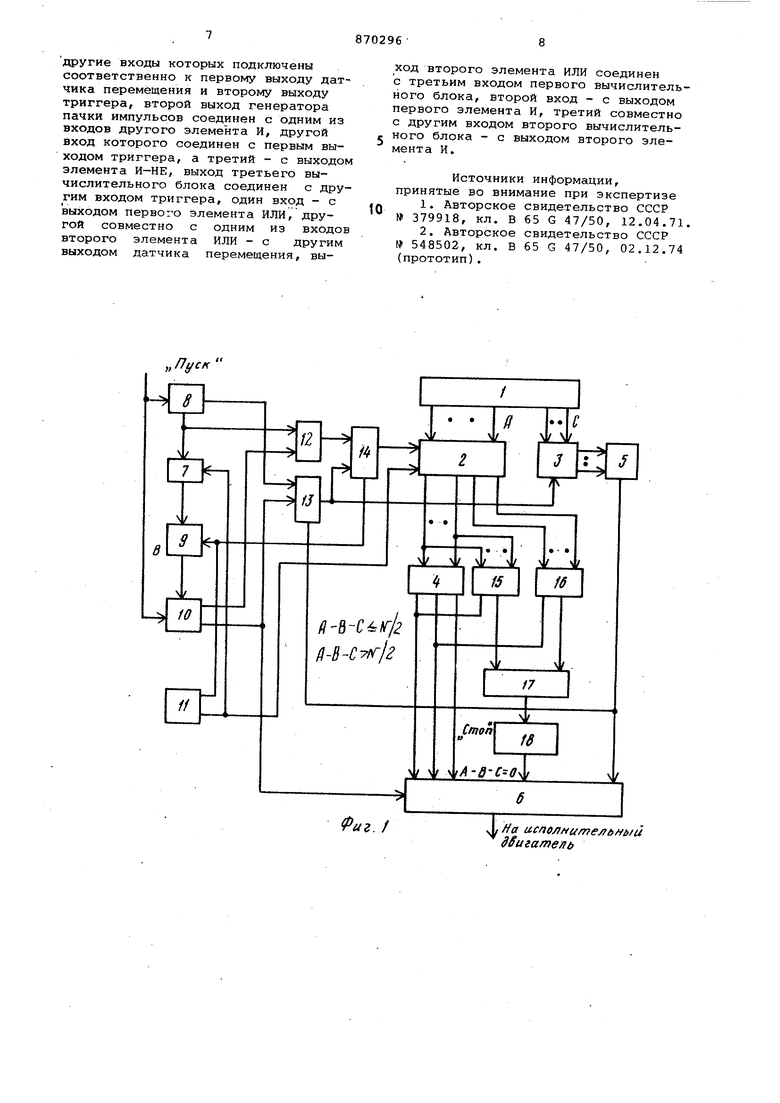
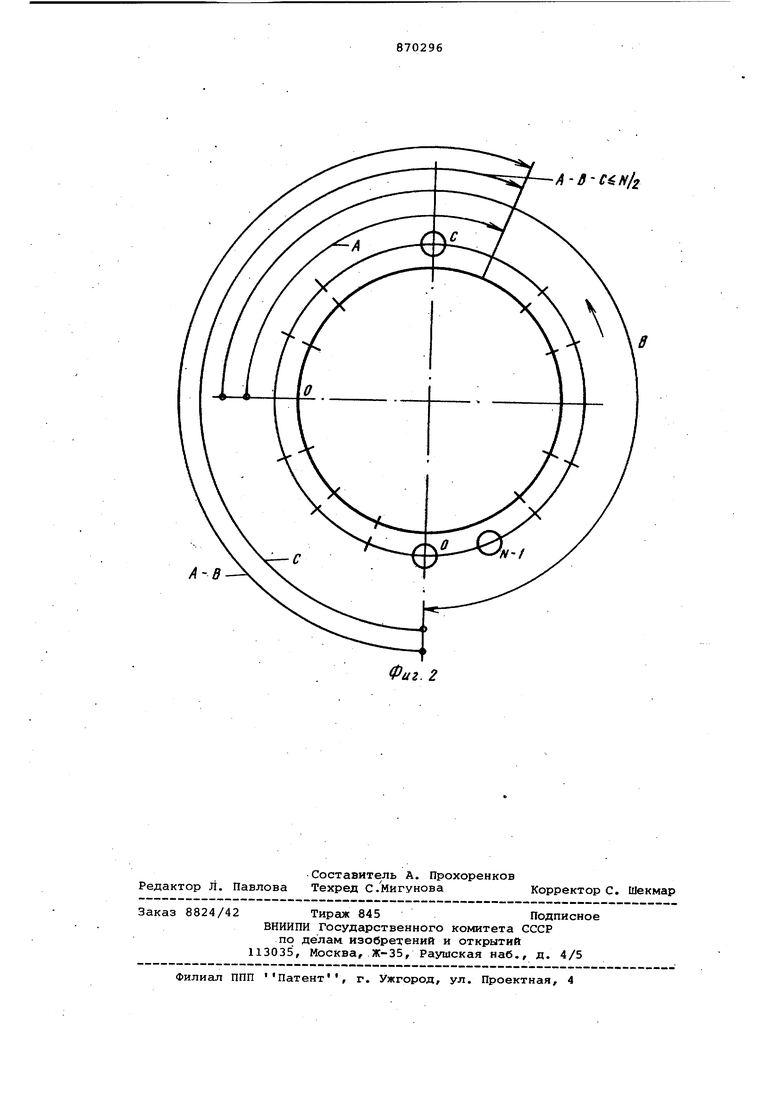
тый - с выходом преобразователя код-напряжение, подключенного входом к выходу развязывающего блока, пятый - с выходом элемента И-НЕ, подключенногр входами к выходам второго вычислительного блока, а шестой - с одним из выходов триггера, один выход генератора пачки импульсов соединен с одним из входов одних из элементов ИЛИ и И, другие входы кото рых подключены соответственно к первому выходу датчика перемещения и второму выходу триггера, второй выход генератора пачки импульсов соединен с одним из входов другого элемента И, другой вход которого соединен с первым выходом -триггера, а третий - с выходом элемента И-НЕ, выход третьего вычислительного блока соединен с другим входом триггера, один вход - с выходом первого элемента ИЛИ, другой совместно с одним из входов второго элемента ИЛИ - с другим выходом датчика перемещения, выход второго элемента ИЛИ соединен с третьим входом первого вычислитель ного блока, второй вход - с выходом первого элемента И, третий совместно с другим входом второго вычислительного блока - с выходом второго элемента И. На фиг. 1 изображена функциональная схема устройства; на фиг. 2 схема варианта рабочего органа и позиций останова. Устройство содержит блок 1 ввода адресной информации, вычислительные блоки, выполненные на реверсивном счетчике 2 и суммирующем счетчике 3 и соединенные с блоком 1 ввода адресной информации, блок 4 сравнения подключенный к выходу реверсивного счетчика 2, элемент 5 И-НЕ, соединен ный с одним из входов блока б управ ления приводом, элемент 7 ИЛИ, вклю ченный между генератором 8 пачки импульсов и вычислительным блоком, выполненным на реверсивном счетчике 9, к выходу которого подключен триг гер 10, датчик 11 перемещения, эле менты 12,. 13 И, соединенные входами с генератором 8 и триггером Ю, эле мент 14 ИЛИ, подключенный к выходам элементов 12, 13 И, ключи 15, 1б и соединенные последовательно развязы вающий блок 47 и преобразователь 18 код-напряжение. Элементы 7, 14 ИЛИ элементы 12, 13 И входят в состав коммутатора. На фиг. 2 приняты следукяцие обоз начения: N - количество ячеек рабочего органа и количество позиций останова; А - номер вызываемой ячейки рабо чего органа; С - номер требуемого останова; . В номер ячейки рабочего органа, расположенной у позиции останова с номером N/1 округленная до полного числа величина, равная половине количества ячеек (N/2 , если N - четное число и N/2 - I если N - нечетное число; . Ячейкам присвоены номера по порядку 0,1,2,...B...,N-1 по ходу часовой стрелки, а позициям останова ,2,.,.,С... N-1. При уменьшении количества позиций останова номера оставшихся не изменяются. А-В-С + РГ где Р - разность ащресов, так как N - коэффициент пересчета реверсивного счетчика, то А-В-С ± Р + И , если Р О, то А-В-С N + р (1), Если Р- О, то А-В-С N- Р Д (2) , т.е. произведя вычитание номеров в счетчике с коэффициентом пересчета N , получим величину разности номеров, если она положительна, или величину дополнения до N , если разность отрицательна. Положительная разность равна расстоянию до требуемой позиции останова по ходу часовой стрелки, отрицательная - расстоянию против хода часовой стрелки. Из выражений (1), (2) видно, что независимо от величин номеров, полученное в результате вычитания в счетчике число равно расстоянию в фиксированных отрезках от требуемой ячейки рабочего органа до требуемой позиции останова в положительном направлении, т.е. по ходу часовой стрелки. Произведя в счетчике действие А-В, получим расстояние в фиксированных отрезках по ходу часовой стрелки от точки В до точки А (фиг. 2), т.е. производим привязку точки А к нулевой позиции останова и действием (А-В)-С определяем расстояние в фиксированных отрезках по ходу часовой стрелки от точки А до требуемой позиции останова С. Очевидно, что алгоритм управления, обеспечивающий выбор направления перемещения вызываемой ячейки рабочего органа на требуемую позицию останова, следующий: А-В-ч:: (движение рабочего органа против хода часовой стрелки); А-В-О (движение по ходу часовой стрелки); А-В-С О (стоп), где . (А-В-С) полученное в результате вычитания число. Из блока 1 ввода а фесной информации в разрядам реверсивного счетчика 2 вводится номер требуемой ячейки (число А), а в разряды суммирующего счетчика 3 номер требуемой позиции останова (число С). Реверсивный счетчик 9 хранит номер ячейки рабочего органа (число В),расположенной у позиции останова с нулевым номером. Командой Пуск триггер 10 устанавливается в единичное состояние, и запускается генератор 8 пач ки импульсов. Генератор 8 подает импульсы через элемент 7 ИЛИ на оди счетный вход .реверсивного счетчика 9 и при наличии сигнала на прямом выходе триггера 10 через элементы 12 И и 14 . один счетный вход реверсивного счетчика 2 (производит действие А-В). При установке импул сами генератора 8 реверсивного счет чика 9 в нулевое положение триггер возвращается в исходное состояние. После этого элемент 13 И при наличи сигналов на выходах триггера 10 и элемента 5 И-НЕ (если в суммирующий счетчик 3 был введен номер требуемо станции) пропускает импульсы генера тора 8 на входы счетчиков 2 и 3 (пр исходит вычитание номера С). При ус новке суммирующего счетчика 3 в нул вое состояние сигнал элемента 5 И-Н исчезает. Генератор 8 пачки импульсов по сигналу Пуск выдает на счетчик 9 импульсов (коэффициент пересчета счетчика), поэтому в счетчике сохраняется первоначальное число В. По сигналам с инверсного выхода триггера 10 элемента 5 Й-НЕ определякяцего нулевое состояние суммирующего счетчика 3, дается разрешение блоку 6 управления приводом на подключение исполнительного двигателя. Блок 4 сравнения сравнивает число в реверсивном счетчике 2 согласно алгоритму управления и выдает сигналы блоку б управления приводом. Начинается перемещение рабочего органа. При прохождении ячейками позиции останова с нулевым номером датчик 11 выдает импульсы на соответ ствующие входы реверсивных счетчиков 9 и 2. Например, если число в реверсивном счетчике 2 меньше или равно , то рабочий орган движется проти хода часовой стрелки. Импульсы с одного выхода датчика 11 перемещения через элемент 7 ИЛИ подаются на один вход реверсивного счетчика 9 и на другой вход реверсивного счетчика 2. При установке импульсами датчика 11 перемещения реверсивного счетчика 2 в нулевое состояние (т.е. 0) блок 4 сравнения выдает команду Стоп блоку 6 управления приводом Управление скоростью перемещения рабочего органа производится преобразователем 18 код-напряжение в зави симости от числа в реверсивном счетчике 2, выражающего кратчайший путь вызываемой ячейки до заданной позиции останова. Если число в счетчике меньше или равно N/2, то сигналом с первого выхода блока сравнения клю 15 через развязывающий блок 17 подает на входы преобразователя 18 код- напряжение прямой код числа в счетчике 2, который при движении рабочего органа уменьшается до нуля импульсами датчика 11 перемещения. Если число в счетчике 2 больше N/2, то на преобразователь 18 код-напряжение подается обратный код числа в реверсивном счетчике 2, который также уменьшается импульсами датчика 11 перемещения при движении рабочего органа. Поэтому рабочий орган большие участки пути проходит на высокой скорости, а при приближении к требуемой станции снижает скорост.ь, чем достигается высокое быстродействие и точность останова вызываемой ячейки рабочего органа на заданной позиции. Использование устройства обеспечивает высокую точность перемещения и высокое быстродействие. Формула изобретения Устройство для управления перемещением механизма по замкнутой трассе, содержащее блок ввода адресной информации, датчик перемещения, вычислительные блоки, один вход одного из которых соединен с одними из выходов датчика перемещения, а другие - с одним из выходов блока ввода адресной информации, другие выходы которого подключены к одним из входов другого вычиcлiIтeльнoгo блока, развязывающий блок, блок управления приводом, блок сравнения, входы которого соединены с одними из выходов первого вычислительного.блока, а один и другой выходы - с одним и другим входами блока управления приводом, ключи, выходы которых соединены с входами развязывающего блока, а одни из входов - с упомянутыми выходами блока сравнения, о тличающееся тем, что, с . целью повьлиения точности управления и быстродействия, оно снабжено коммутатором, выполненным на элементах ИЛИ, И,И-НЕ, триггером и генератором пачки импульсов, соединенными входами с шиной запуска, к преобразователем код-напряжение, причем другие входы ключей соединены соответственно с первыми и вторыми выходами первого вычислительного блока, третий вход блока управления привоом соединен с третьим выходом блока сравнения, четвертый - с выходом преобразователя код-напряжение, подключенного входом к выходу развязывающего блока, пятый - с выходом элемента И-НЕ, подключенного входами выходам второго вычислительного лока, а шестой - с одним из выходов риггера, один выход генератора пачи импульсов соединен с одним из ходов одних из элементов ИЛИ и И,
другие входы которых подключены соответственно к первому выходу дат чика перемещения и второму выходу триггера, второй выход генератора пачки импульсов соединен с одним из входов другого элемента И, другой вход которого соединен с первым выходом триггера, а третий - с выходом элемента И-НЕ, выход третьего вычислительного блока соединен с другим входом триггера, один вход - с выходом первого элемента ИЛИ, другой совместно с одним из входов второго элемента ИЛИ - с другим выходом датчика перемещения, выход второго элемента ИЛИ соединен с третьим входом первого вычислительного блока, второй вход - с выходом первого элемента И, третий совместно с другим входом второго вычислительного блока - с выходом второго элемента И.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР
№ 379918, кл. В 65 G 47/50, 12.04.71.
2.Авторское свидетельство СССР
№ 548502, кл. В 65 G 47/50, 02.12.74 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления вращением объекта | 1991 |
|
SU1774309A1 |
| Устройство для автоматического адресования движущихся объектов | 1989 |
|
SU1612316A1 |
| Устройство для поиска информации | 1979 |
|
SU890417A1 |
| Устройство для вычисления массы нефти и нефтепродуктов в резервуарах | 1983 |
|
SU1117653A1 |
| Устройство для управления транспортными средствами | 1988 |
|
SU1589291A1 |
| Устройство для автоматического адресования движущихся объектов | 1988 |
|
SU1580399A1 |
| Устройство для вероятностного моделирования работы транспортных систем | 1988 |
|
SU1612313A1 |
| Устройство для регистрации веса в динамике | 1983 |
|
SU1153239A1 |
| Устройство для управления автоматическими транспортными средствами | 1983 |
|
SU1101841A1 |
| Стабилизатор переменного напряжения | 1988 |
|
SU1534434A1 |
„/7угл ff-B-C ff/ /i-B-C /
f6
uz.f
//a и.сполмите/ге б/и дВигатеяь
A-В
A-0C N/2
иг.2
