V54) УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СЕКЦИЕЙ КРЕПИ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство дистанционного управления секциями крепи | 1979 |
|
SU863876A2 |
| Машина самоходная гусеничная малогабаритная для подъема и установки бордюрного камня. | 2022 |
|
RU2785102C1 |
| УСТАНОВКА ДЛЯ БУРЕНИЯ, ИСПЫТАНИЯ И РЕМОНТА НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН УПА-80 | 2007 |
|
RU2362868C1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СЕКЦИЯМИКРЕПИ | 1972 |
|
SU344138A1 |
| Траверса-кантователь | 1986 |
|
SU1493590A1 |
| Агрегат подъемный для ремонта скважин АПРС-32/40 | 2019 |
|
RU2712990C1 |
| Устройство для дистанционного управления многопозиционными распределителями механизированных крепей | 1982 |
|
SU1116170A1 |
| ЛЕБЕДКА | 2009 |
|
RU2401242C1 |
| Очистной агрегат | 1981 |
|
SU972138A1 |
| Приводное устройство для вращения захвата руки промышленного робота относительно взаимно-перпендикулярных осей и движения губок захвата | 1980 |
|
SU919865A2 |
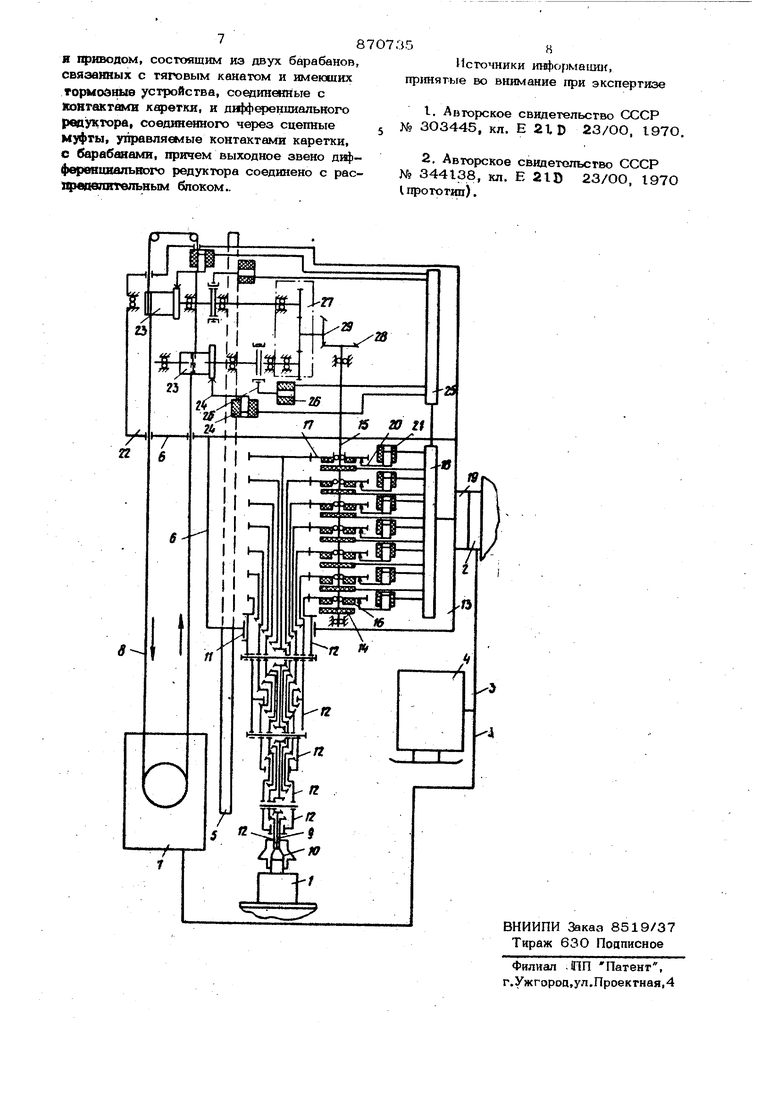
Изобретение относится к устройствам управления механизированными крепями и может быть использовано в скстемак дистанционного управления. Известно устройство для дистанционно го управления гидрораспределителями сек ций крепи, содержащее привод с барабаном, гибкую связь, захват, пульт управление и .контроля, датчик положения зах|Вйта, натяжное устройство и падрорасхфо делители с храповыми механизмами. Для переключения нужного распределителя включают привод, и гибкая связь с захва том пер« 1ещаетк;я по скосам храповых колес, отсчитывая гидрораспределители. У заданного гидрораспределителя привод останавливают и реверсируют. При этом захват воздействует на храповое колесо и поворачивает гидрораспределитель на одну позицию. Совершая возвратно-поступательные движения, захват осуществляет программные переключения осдрораспределителя Г13. Недостатком такого устройства является то, что нужное движе1ие секшш достигается в результате последовательного подключения ее гидрораспределягеля с позиции на позицию, что приводит к ряду лишних движений секции либо требует oiv ключения насосной станпни кршга на п&риод переключения. Известно устройство дистанционного управления секций крепи,включаюшее передвижнук) каретку с контактами, привод, тяговый канат, монорельс, гидрораспределители, захваты и пульт управления, соединенный с контактами секций крепа И с приводом. В н&л на каретке размешены цeвкиi а гидрораспределители свабжены малы скнми крестами Г23. Указанное устройство имеет рад недостатков:ограничохные функциональные возможности за счет того, что цевки поворачявают мальтийские кресты на опроделевный угол в стро1Ч)й последовательности позиций. Программа движений одинакова для всех секдий крепи. В случаях работы хрепи в сложных горногеологических усло Биях жесткой программы управления секшшми недостаточно, так как ссх:тонкие каждойиз них индивидуально и определяется вэаимодейс твиет с соседними секциями и боковыми породами пласта. Типичным является заклинивание передвигаемой секшш в результате попадания в направляющие кусков породы, что приводит систему управления к сбою, так как к п едвижке следующей секшш можно перейти только после того как полностью передвинута предыдущая, сигналом чего служит замыкание контактов на каретке и секции крепи; низкая избирательность управления, которая заключается в том, что при протягивании каретки вдоль сеКшш последние строго последовательно выполняют предусмотренные программой действия. При это исключается возможность пропуска секции при управлении и реверс каретки в офатную сторону, так как это вызывает лишние повторные движения секций. Целью изобретения является расширение функциональных возможностей и повышение избирательности управления. Это достигается тем, что каретка снаб жена многозвенным манипулятором, взаим действующим через захват с гидрораспределителями, распределительным блоком, соединенньш с контактами каретки и звен ями манипулятора, и приводом, состоящим из двух барабанов, связанных с тяговъгм канатом и имеющих тормозные устройства соединенные с контактами каретки, и Д1 ференииального редуктора, соединенного через сцепные муфты, управляемые контактами каретки, с барабанами, причем выходное звено ди})ферен1шального редуктора соединено с распределительным блоком. На чертеже изображен один из вариантов конструкции устройства дистанционног управления секциями крепи, На каждой секции крепи (на чертеже не показаны) закреплен гидрораспределитель 1, осуществляющий управление приводами секций (гидравлическими стойками домкратами конвейера и т.д.), и контакты 2, связанные пиниями 3 с пультом управлешш 4, Вдоль секций крепи предложен мов рельс 5, на котором расположена каретка 6, перемещаемая вдоль секций крепи приводом 7, выполненным в ввде лебедки с бесконечным канатом 8, ветви которого движутся вдоль монорельса. При вод 7 линией 3 связан с пультом 4. 8 5 Каретка 6 содержит многозвенный манипулятор 9 с универсальным захватом Ю, например, типа МЭМ. Он. представляет собой последовательное соединение механических звен1:,ев, еном 1 1 непоавижная стойка связанная с корпусом каретки, а звенья 12 подвижные и представляют собой зубчатые передаточные механизмы. Каждый механизм связан с распределительным блоком 13, который выполнен, например s в Bhme набора электромагнитных индукцио1шых муфт, у которых ведущие полумуфты 14 жестко закреплены на валу 15, а ведомые полумуфты 16 свободно сидят на нем и несут зубчатые венцы 17, связанные со звеньями 12 манипулятора. Каждая из ведущих полумуфт связана через коммутатор 18 с контактами 19 каретки, а каждая из ведомых полумуфт снабжена тормозами 2О, механизмы включения 21 которых также через коммутатор связаны с контактами 19. Распределительный блок предназначен для передачи вращающегося момента посредством электромагнитных муфт 14, 16 и вала 15 звеньям манипулятора от устройства перет 1ещения 22 каретки. Это устройство содержит два барабана 23, на которые навиты ветви тягового каната 8 без проскальзывания так, что при протягивании каната барабаны вращаются относительно корпуса каретки в противоположные стороны. Барабаны снабжены тормозами 24, затормаживающими их вращение относительно корпуса каретки. Тормоза 24 через коммутаторы 25 и 18 соединены,с контактами 19. При помощи сцепныхмуфт 26, связанных через коммутаторы 25 и 18, выходное звено которого связано посредством зубчатой пары 28 и 29 с распределительным блоком. Работа устройства заключается в перемещении каретки к секции с -м номером и переключении ее гидрораспределителя по программе. Вначале каретка 6 находится у одной из секций крепи. При этом контакты 12 и 19 секции и каретки замкнуты, а каретка связана с пультом управления. Все ее механизмы включены, а звенья 12 манипулятора зафиксированы в транспортном положении, и все механизмы устройства связаны с пультом управления 4, Перемещение каретки к -с -41 секции, которой нужно управлять, осуществляется следующим образсял. Включают с пульта 4 привод 7, чем вызывают движение тягчэвого каната 8. При этом одна его ветвь движется вдоль монерельса на привод, а другая в противополо.жную сторону (согласно стрелкам на чертеже), и вращают барабаны 23 кареткн. Но каретка остается неподвижной, так как барабаны свободно вращаются под действием каната. Если i -а. секция распо ложена между кареткой 6 и приводом 7, то для ее п емещения включают тормоз 24 верхнего барабана 23, чем затормаживают его вращение относительно корпуса каретки. Так как канат не проскальзывает по поверхности барабанов, каретка буксируется к i -и секции. При этом второй барабан 23 свободно обкатывается по другой ветви каната. Если каретка pac положена ближе к приводу, чем ( -я секция, то включается второй тормоз 24, затормаживается нижний барабан 23, и каретка буксируется в противоположн то сторону. При движении каретки на каждой из секции, мимо которых она перемещается, происходит последовательное замыкание и размыкание контактов 2 и 9, но каретка останавливается только при замыкании эткх контактов на 4 -и секции потому, что них передается сигнал с пульта управления на выключение тормоза 24 После остановки каретки у -f -и секции осуществляют уттравление ее перемещениями посредством переключений гидрорасп1 е делителей I. Если крепь управляется ги- дрораспределителями с плоскими золотниками, то для того, чтобы вызвать нужное движение секции крепи, необходимо установить золотник ее гидрораспределителя в соответствующую этому движению позицию, а после окончания движения секции вернуть его в исходное положение. Для этого в устройстве используется манипулятор, который аналогично руке человека перемещае1х:;я из исходного положения-в положение, пригодное для фиксации хвостовика либо рукоятки гидрораспределителя, захватывает губками универсального захвата Ю последние, поворачивает на заданный угол, выдерживает паузу, необходимую для того, чтобы секция выполнила нужную операцию и возвращает гидрораспределитель в исходное положение Каждое из этих действий манипулятора формируется совокупностью согласованных движений звеньев, управляемых, например, по программе с пульта 4. Например, движение губок универсального захвата Ю осуществляется следующим образом. С пульта управления включают, одну из сцепных муфт 26 подачей сигнала на привод включения через коммутаторы 25 8 356 и 18 и контакты 19, 2. Выключ(ают тормоз 2О подачей сигнала на механизм 21 через контакты 19 и 2, коммутатор 18 и включают электромагнитную муфту 14, При этом первым действием приводится во вращение вал 15 распределительного блока 13, вторым растормаживается ведомая полумуфта 16 губок универсального захвата, а третьим осуществляется передача вращения от вала 15 чероз поnyM T))Ty 14 и 16 и ряд зубчатых кокическнх передач звену 12 манипулятора, вращение которого приводит в движение гуёки захвата в одном нащ)авлении. Противоположное движение разжатия губок осуществляется, например, за счет реверС1фования вращения вала 15, которое осуществляется при тех же условиях, но включается, вторая муфта 26. Движение других зв«1ьев манипупятчэра 9 осуществляется аналогично движешпо губок захвата. Предлагаемое устройство имеет щирокие функциональные возможности за счет того, что оно позволяет управлять с пульта движениями любой секции крепи в любой нужной последовательности. При этом не возникают сбои в работе устройства изза недодвижек и заклиниваний секций, а также появляется возможность дистационно устранять npitMUHbi недодвижек, например, извлекать манипулятором куски породы либо угля, попавшие в направлякяцие, что может осуществлять так же, как и описанн1;1е выше переключения гидрораспределитолей. Устройство обеспечивает переключения гидрораспроделителей из исходной позиции в заданную без остановки в промежуточных, т.е. не вызывает лишних движений секций Формула изобретения Устройство дистанционного управления секцией крепи, включающее передвижную каретку с контактами, привод, тяговый канат, монорельс, гидрораспределигели, захваты и пульт управления, соединенный с контактами секций крепи и с приводом, отличающееся тем, что, с целью расширения функциональных возможностей и повышения избирательности угфавления, каретка снабжена многозвенным манипулятором, взаимодействующим через захват с гидрораспределител$ш1И, распределительным блоком, соединенным с контактами каретки и звеньями манипулягора,
