(54) ПРИВОДНОЕ УСТРОЙСТВО ДЛЯ ВРАЩЕНИЯ ЗАХВАТА
РУКИ ПРОМЫШЛЕННОГО РОБОТА ОТНОСИТЕЛЬНО ВЗАИМНО
ПЕ-РПЕНДИКУЛЯРНЫХ ОСЕЙ И ДВИЖЕНИЯ ГУБОК ЗАХВАТА
1
гзобретение относится к машйнострое ння), а имевдо К промышленным роботам и манипуляторам.
По основному авт. св. № 580112 известно, приводное устройство облегченной конструкции для вращения исполнительного звена промышленного робота относительно двух взаимно перпендикулярных осей,содержащее звено качения, исполнительное звено, двигатель, закрепленный в основании, коническую зубчатую передачу для вращения «сполни-, тельного звена .относительно двух взаимно перпендикулярных осей, управляемые муфты в цепях вращения исполнительного звена и звена качения 1.
Недостатком этого приводного устройст-; ва является отсутствие возможности изменения направления вращения исполнительного звена относительно звена качения при различных направлениях движения звена качения.
Цель изобретения - расщирение области применения устройства.
Поставленная цель достигается тем, что . в приводном устройстве для вращения руки промыщленного робота относительно взаимно перпендикулярных осей и движения губок захвата, в цепи вращения основания захвата установлены дополнительные зубчатое колесо и управляемая муфта для изменения направления вращения. Это позволяет
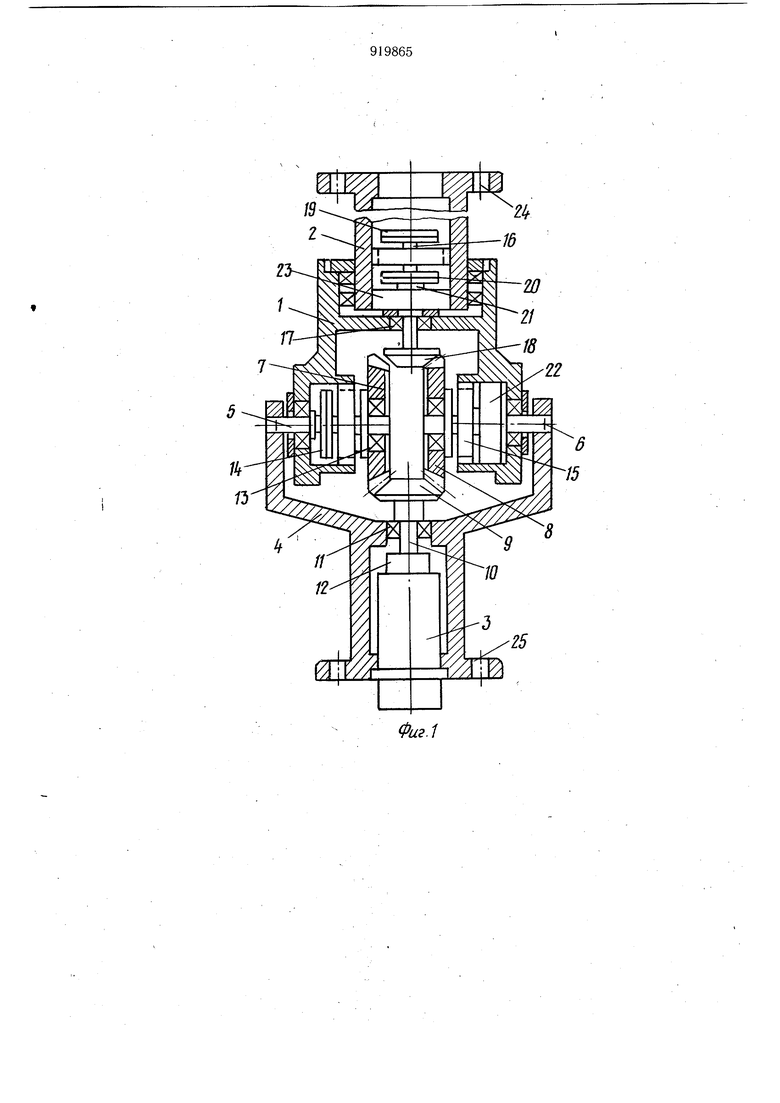
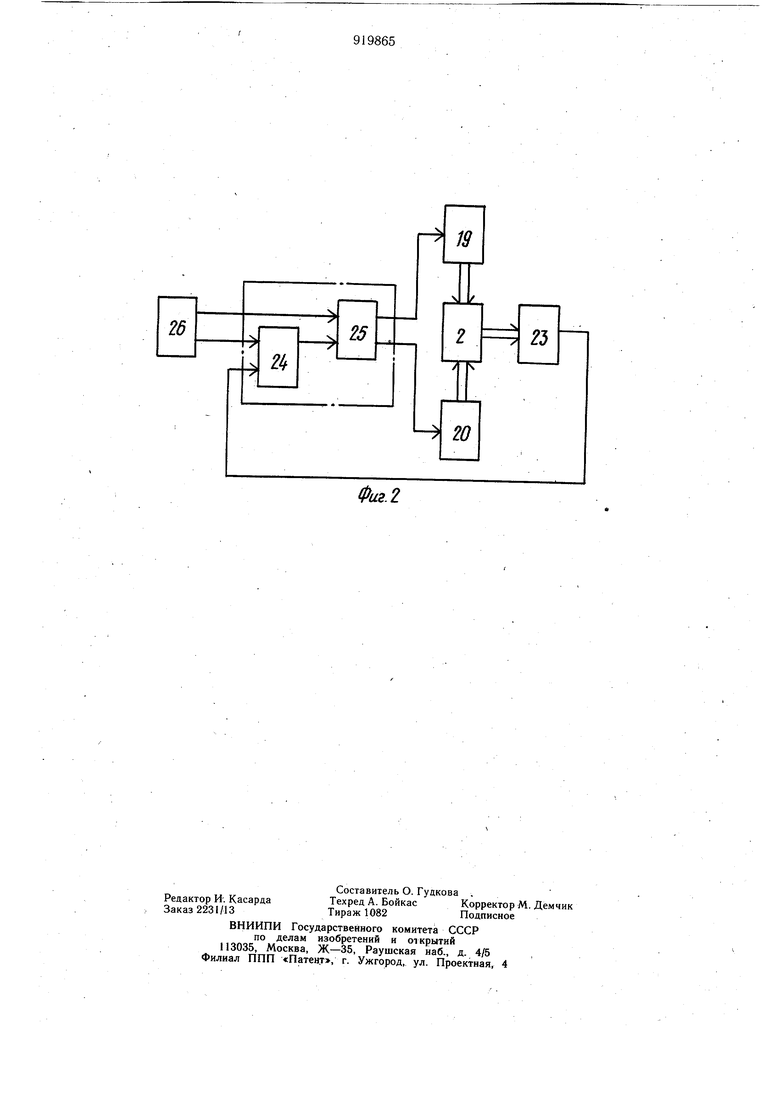
вращать исполнительное звено одновремен но по двум координатам и в любом выбран ном Направлении при соответствующем управлении муфтами от блока управления. На фиг. 1 изображена схема приводного устройства, общий вид; на фиг. 2 - схема управления движением приводного устройства по одной координате.
Приводное устройство включает в себя основание 1 захвата, корпус 2 захвата, кинематически связанныйС приводным двигателем 3, закрепленным в корпусе 4 руки. Основание 1 щарнирно соединено с корпусом 4. На осях 5 и 6 корпуса, жестко скрепленных с ним, свободно установлены конические зубчатые колеса 7 и 8, образующие с зубчатым
20 колесом 9, жестко сидящем на валу 10, конические зубчатые передачи в цепи вращения основания 1 захвата. Вал 10 установлен в корпусе 4 на подщипнике 11 -и через редуктор 12 кинематически связан с валом двигателя 3. На оси 5 установлена управляемая муфта, состоящая из приводной полумуфты 13 и тормозной полумуфты 14, предназначенная для поперечного соединения основания захвата 1 либо с зубчатым колесом 7, либо с осью 5. На оси 6 установлена другая управляемая муфта 15 для соединения основания захвата 1 с зубчатым колесом 8. Кинематическая цепь для вращения корпуса 2 захвата включает в себя вал 16, установленный в основании 1 захвата на подщипнике 17 и расположенный под углом к оси его вращения, зубчатое колесо 18 для соединения с двигателем 3. На валу 16 установлена управляемая муфта, состоящая из приводной полу муфты 19 и тормозной полумуфты 20, предназначенная для поочередного соединения корпуса 2 захвата либо-с валом 16, либо с полой осью 21, жестко закрепленной на основании 1 захвата.
На осях 6 и 21 могут быть установлены позиционные датчики 22 и 23, кинематически связанные с основанием Г захвата и корпусом 2 захвата.
Блок управления движения корпуса 2 захвата, связанным с губками захвата (на чертеже не показано) по одной координате, например вращение относительно основания 1 захвата, содержит генератор 24 импульсов и переключающее устройство 25, соединенные своими входами с пультом 26 управления и позиционным датчиком 23, а выходами - с приводной полумуфтой 19 и тормозной полумуфтой 20.
Устройство работает следующим образом.
При включении от пульта 26 управления роботом двигателя:3 в заданном направлении вращение через редуктор 12, вал 10 и зубчатое колесо 9 передается зубчатым колесам 7 и 8. Основание, в зависимости от заданного направления, включением приводной полумуфты 13 или муфты 15, соединяется либо с зубчатым колесом 7, либо с зубчатым колесом 8, вращаясь вокруг осей 5 и 6. Одновременно движение от вала 10 передается валу 16. При соединении корпуса 2 включением приводной полу.муфты 19 с валом 16 и отключении муфт 13 и 15, он вращается
относительно основания 1. При попеременном включении полумуфт 19 и 13 или 15 движение корпуса 2 происходит одновременно по двум координатам. Позиционирование корпуса 2 по любой из координат, например
при вращении относительно основания 1, осуществляется управляемыми муфтами в щаговом режиме работы. Управляющий сигнал от пульта 26 упр.авления роботом поступает на генератор 24 импульсов, который формирует управляющие импульсы заданных параметров, а переключающее устройство 25 поочередно включает либо приводную полумуфту 19, либо тормозную полумуфту 20. Корпус 2 захвата движется в режиме щагового перемещения. Параметры управляющих импульсов определяются разностью между задающей и отработанной величиной перемещения введением обратной связи от позиционного датчика 23, что обеспечивает плавное снижение скорости корпуса 2 захвата до нуля в точке позиционирования.
Возможность движения исполнительного звена (корпуса,2 захвата) по двум координатам и в любом выбранном направлении, позиционирование его с повыщенной точностью при плавном подходе к программируемой точке на пониженной скорости позволяет применить устройство для построения программных манипуляционных устройств модульного типа.
Формула изобретения
Приводное устройство для вращения захвата руки промыщленного робота относительно взаимно перпендикулярных осей и движения губок захвата по авт. св. № 580112, отличающееся тем, что, с целью расщирения области применения устройства, в цепи вращения основания захвата установлены дополнительные зубчатое колесо и управляемая муфта для изменения направления вращеНИЯ.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 580112, кл. В 25 J 3/00, 1976 (прототип).
24
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Промышленный робот | 1988 |
|
SU1537509A1 |
| Захват промышленного робота | 1987 |
|
SU1451004A1 |
| Адаптивное электромеханическое захватное устройство для промышленных и коллаборативных роботов | 2024 |
|
RU2836085C1 |
| Захват промышленного робота | 1980 |
|
SU975387A1 |
| Схват | 1977 |
|
SU659377A1 |
| Захват промышленного робота | 1981 |
|
SU963852A1 |
| Модуль манипулятора | 1980 |
|
SU984859A1 |
| Исполнительный орган промышленного робота | 1977 |
|
SU738867A1 |