Изобретение относится к машиностроению, а именно к манипуляторам для механизации вспомогательных операций на машиностроительных предприятиях для автоматического обслуживания конвейеров, в частности манипуляции изделий или грузов при их снятии и возвращении на конвейер, например при штамповке с переводом и установкой деталей на пресса или при использовании на автоматических линиях механической обработки деталей, когда деталь проходит несколько операций на различных станках и т. д. Известно устройство для съема грузов с захвата подвесного конвейера, включаюшее силовой цилиндр с держателем груза, силовой цилиндр отвода груза на рабочую позицию и систему датчиков для управления работой устройством 1. Недостатком данного устройства является сложность конструкции за счет применения четырех силовых цилиндров и выполнения системы управления в виде двух фотореле и девяти датчиков. Кроме того, данное устройство не обеспечивает после съема груза и отвода на рабочую позицию возврата того же груза на подвесной конвейер без его отсоединения от держателя. Наиболее близким к изобретению по технической сушности и достигаемому результату является устройство для съема грузов с захвата подвесного конвейера, включающее силовой цилиндр с держателем груза, силовой цилиндр отвода груза на рабочую позицию, связанные с силовыми цилиндрами золотниковые распределители, управляемые от рычагов, и задающий механизм 2. Однако известное устройство не обеспечивает возврат груза, удерживающего держателем, на подвесной конвейер с рабочей позиции. Целью изобретения является расширение технологических возможностей устройства путем обеспечения возврата груза на подвесной конвейер. Указанная цель достигается тем, что захват подвесного конвейера выполнен в виде двух крюков, а задающий механизм - в виде флажков, жестко закрепленных на крюках на разных по высоте уровнях с возможностью взаимодействия с рычагами управления золотниковым распределителем силового цилиндра с держателем груза, причем рычаги управления установлены друг
над другом и связаны между собой посредством пружины, при этом силовой цилиндр с держателем груза установлен на штоке силового цилиндра отвода груза на рабочую позицию, поршневая полость последнего связана с торцовой полостью его золотникового распределителя посредством трубопровода, имеюш,его реле времени.
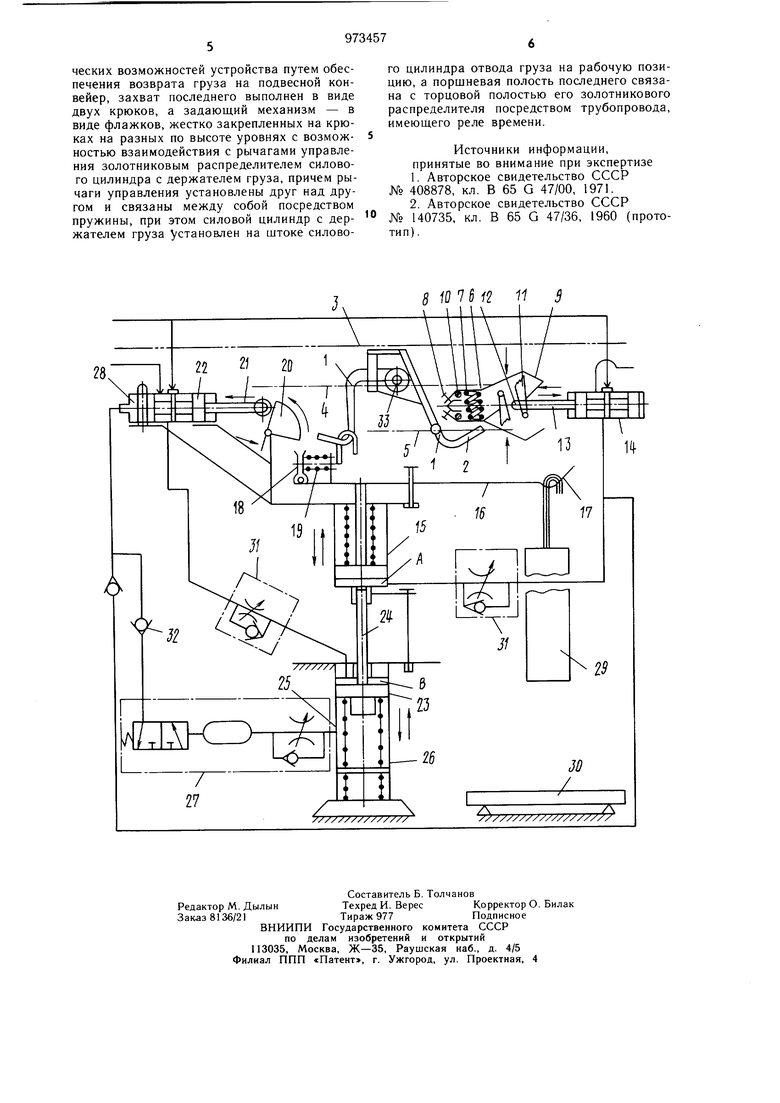
На чертеже изображена принципиальная схема описываемого устройства.
Устройство включает задаюший механизм в виде флажков 1, закрепленных на крюках 2 конвейера 3, расположенных на двух уровнях 4 и 5. Флажки 1 воздействуют на управляюший механизм в виде переключающего приспособления 6, содержашего разжатые пружиной 7 до упоров 8 фасонные рычаги 9, установленные на осях 10 друг над другом. Каждый рычаг 9 связан через подпружиненный толкатель 11 с роликом 12 штока 13 первого золотникового распределителя 14, пневмогидравлически связанного с полостью А верхнего силового цилиндра (пневмогидропривода) 15, где закреплен держатель 16 в виде загнутого зацепа 17 и подпружиненный отклоняющийся толкатель 18 с пружиной 19. Толкатель 18 взаимодействует с сектором 20, который перемещает шток 21 второго золотникового распределителя 22, пневмогидравлически связанного с полостью В нижнего силового цилиндра (пневмогидропривода) 23 со штоком 24. Отверстие 25 в боковой части нижнего цилиндра 26 поршневой полости пневмогидропривода 23 связано через трубопровод и реле времени 27 с торцовой полостью 28 второго золотникового распределителя 22.
Работа устройства заключается в следующем.
С конвейера 3 груз 29 снимается и устанавливается на рабочую позицию (весы) 30, после фиксации веса груза 29 он возвращается на конвейер 3. Работа манипуляции: флажок 1 верхнего уровня 4 крюка 2 с грузом 29 действует на рычаг 9 переключающего приспособления 6, который поворачивается вокруг оси 10, сжимая пружину 7, перемещает через толкатель 11 шток 13, результате чего первый золотниковый распределитель 14 соединяет полость А пневмогидропривода 15 с силовой магистралью, например, сжатым воздухом, для настройки скорости перемещения щтока с держателем 16 в схему встроен дроссель 31. Два крайних положения штока определяют два положения золотникового распределителя 14: при действии верхнего флажка 1, т. е. верхнего уровня 4, рычаг 9 перемещает шток 13 влево и полость А соединяется со сжатым воздухом, а если действует флажок 1 на нижнем уровне 5, то через рычаг 9 шток 13 перемещается вправо и тогда полость А пневмогидропривода 15 соединяется с атмосферой. Таким образом в полость А поступает сжатый воздух, и шток с держателем 16, поднимаясь, становится выше уровня крюков, так, что, занутый зацеп 17, подойдя к крюку, снимает груз 29, одновременно с этим подпружиненный пружиной 19 толкатель 18 через сектор 20 поворачивает последний, действуя на шток 21 второго золотникового распределителя 22, который перемещает золотники влево, тем самым соединяет полость В нижнего пневмогидропри.. вода 23 с напорной магистралью сжатым воздухом, при этом шток 24 привода 23 перемещается вниз, одновременно с закрепленным на нем верхним пневмогидроприводом 15 и держателем 16 с грузом 29.
При движении вниз груз устанавливается на весы, при этом поршень переходит отверстие 25, через которое сжатый воздух поступает на реле времени 27, которое отрегулировано на время фиксации веса, после чего сжатый воздух поступает, минуя обратный клапан 32, в торцовую полость 28
второго золотникового распределителя 22, золотник которого перемещается вправо, обеспечивая соединение полости В с атмосферой, в результате того, что пневмогидропривод одностороннего действия, то шток 24
5 возвращается в верхнее положение совместно с грузом 29, который устанавливается в верхнем положении выше крюка 2. При действии флажка 1, расположенного на крюке 2 нижнего уровня 5, на рычаг 9 переключающего приспособления 6 последний поворачивается вокруг оси 10, сжимая пружину 7, перемещая через толкатель 11 шток 13 вправо, при этом полость А и торцовая полость 28 соединяются с атмосферой.
Перемещение верхнего пневмогидроцилиндра 15 вниз оставляет груз 29 на .крюке
5 2, так как груз цепляется за флажок 1 и сдвигается с загнутого зацепа 17, который одновременно перемещается вниз в исходное положение. Таким образом, все элементы устройства приведены в исходное положение. Для того, чтобы исключить работу устройства вхолостую при действии верхнего флажка 1, находящегося на верхнем уровне 4, предусмотрена возможность поднятия легкого крюка 2 (без груза 29) фасонными рычагами 9 за счет шарнира 33.
5 Применение данного устройства обеспечивает возможность без съема груза с держателя подать его на весы и возвратить на захваты подвесного конвейера.
Формула изобретения
Устройство для съема грузов с захвата подвесного конвейера, включающее силовой цилиндр с держателем груза, силовой цилиндр отвода груза на рабочую позицию, связанные с силовыми цилиндрами золотниковые распределители, управляемые от рычагов, и задающий механизм, отличающееся тем, что, с целью расширения технологи
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки изделий | 1986 |
|
SU1346536A1 |
| Устройство для экскавации грунта | 1980 |
|
SU964058A1 |
| Устройство для ориентированной выдачи заготовок | 1986 |
|
SU1346396A1 |
| ПОДВЕСКА ПОДВЕСНОГО ТОЛКАЮЩЕГО КОНВЕЙЕРА ДЛЯ КУЗОВА АВТОМОБИЛЯ | 2003 |
|
RU2253603C1 |
| Штанговый толкающий конвейер | 1981 |
|
SU967908A1 |
| Устройство для транспортирования штучных грузов | 1976 |
|
SU658048A1 |
| Автомат для резки колец из эластичных трубчатых заготовок | 1975 |
|
SU559830A2 |
| Устройство для автоматической заправки нити на мотальной машине | 1981 |
|
SU1006352A1 |
| Устройство для перегрузки рулонов | 1987 |
|
SU1546397A2 |
| Устройство для испытания плунжерной пары на гидроплотность | 1988 |
|
SU1657715A1 |
