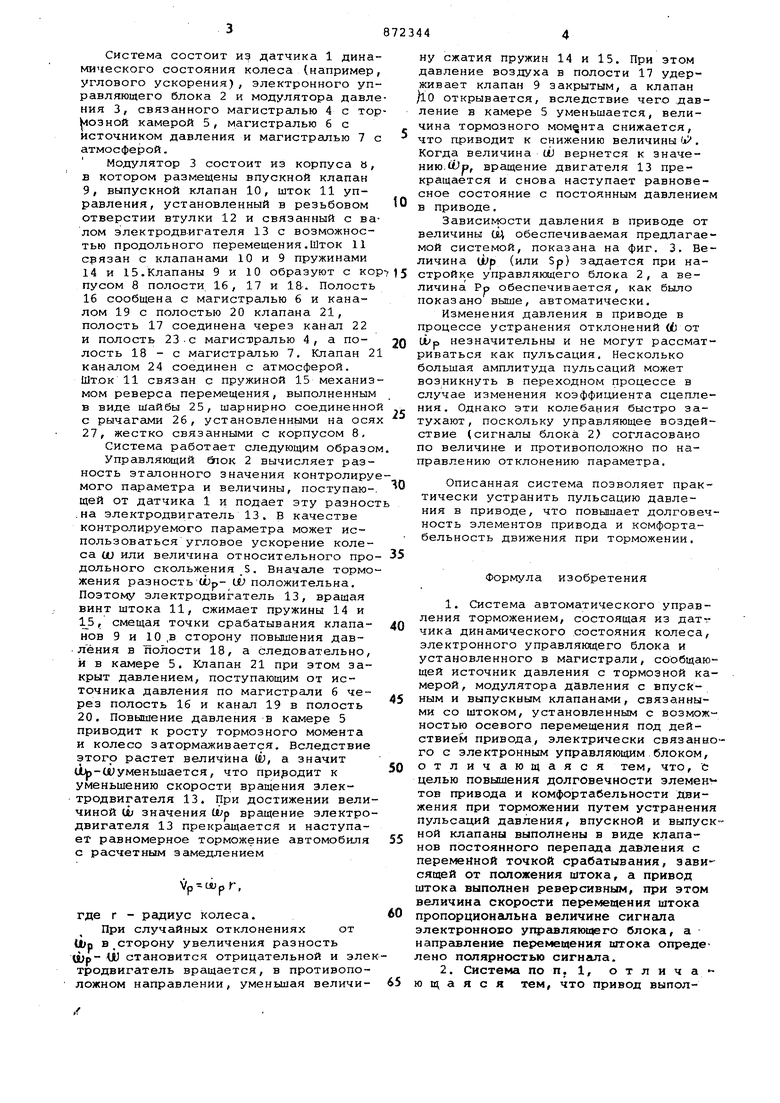
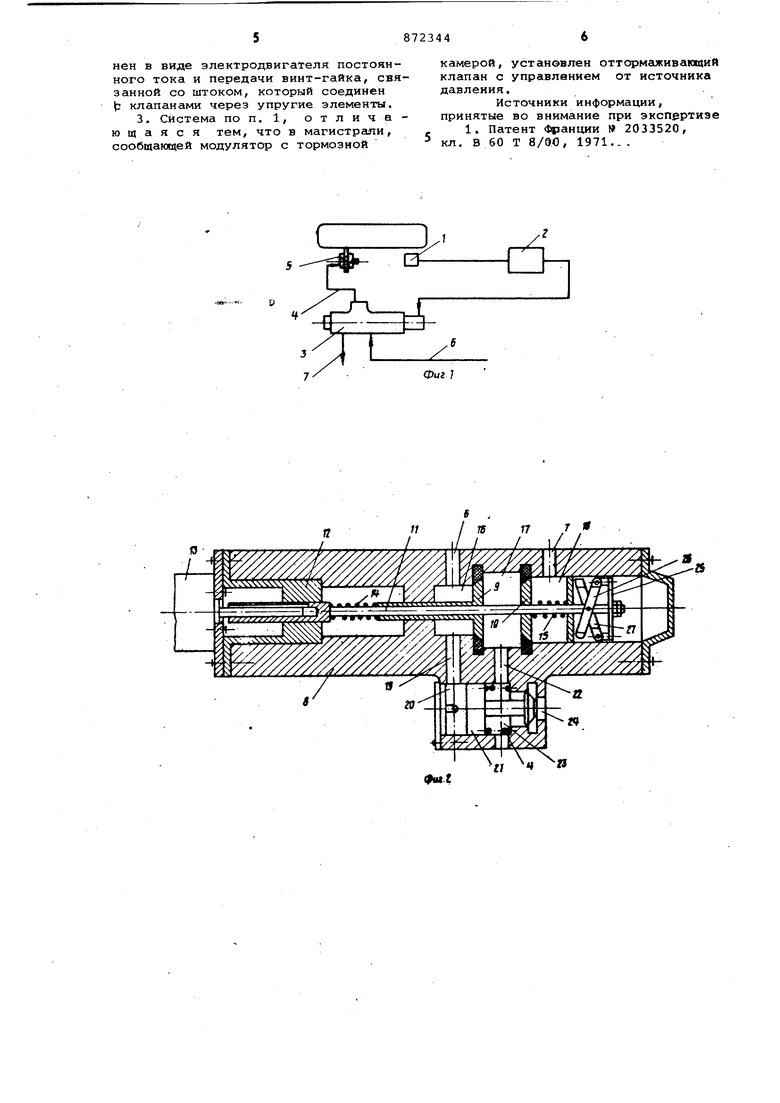
Изобретение относится к транспортному машиностроению, в частности к системам автоматического управления торможением. Наиболее близким техническим решением к предлагаемому является система автоматического управления торможением, состоящая из датчика динамического состояния колеса, электронного управляющего блока и установленного в магистрали, сообщающей источник дав ления с тормозной камерой, модулятора давления с впускным и выпускным клапа нгиии,связанными со штоком, установленным с возмоткностью осевого перемещения под действием привода, электрически связанного с электронным управляющим блоком lj« Однако указанная система обладает значительной пульсацией давления в приводе f что вызывает пульсацию нагрузок на элементы привода и снижает их долговечность. Периодическое изменение величины тормозной силы способствует возникновению продольных колебаний автомобиля и снижению комфортабельности движения при торможении. Цель изобретения - повышение долговечности элементов привод и комфортабельности движения при торможении путем устранения пульсаций давления. Указанная цель достигается тем, что впускной и выпускной клапаны выполнены в виде клапанов постоянного перепада давления с переменной точкой срабатывания, зависящей от положения штока, а привод штока выполнен реверсивным, при этом величина скорости перемещения штока пропорциональна величине сигнала электронного управляющего блока, а направление перемещения штока определено полярностью сигнсша. Кроме того, привод выполнен в виде электродвигателя постоянного тока и передачи винт-гайка, связанной со штоком, который соединен с клапанами через упругие элементы. Кроме того, в магистрали, сооб-. щающей модуляторс тормозной камерой, установлен оттормаживающий клапан, управляемый давлением от источника давления На фиг. 1 показана схема данной системы; на фиг. 2 - модулятор, разрез; на фиг. 3 - зависимость давления от углового замедления, обеспечиваемая предлагаемой системой. Система состоит иэ датчика 1 дина мического состояния колеса (например углового ускорения), электронного уп равляющего блока 2 и модулятора давл ния 3, связанного магистралью 4 с то розной камерой 5, магистралью б с источником давления и магистралью 7 атмосферой. Модулятор 3 состоит из корпуса ь, в котором размещены впускной клапан 9, выпускной клапан 10, шток 11 управления, установленный в резьбовом отверстии втулки 12 и связанный с ва лом электродвигателя 13 с возможностью продольного перемещения,Шток 11 связан с клапанами 10 и 9 пружинами 14 и 15.Клапаны 9 и 10 образуют с Ko пусом 8 полости 16, 17 и 18-. Полость 16 сообщена с магистралью 6 и каналом 19 с полостью 20 клапана 21, полость 17 соединена через канал 22 и полость 23-с магистралью 4, а полость 18 - с магистралью 7, Клапан 2 каналом 24 соединен с атмосферой. Щток 11 связан с пружиной 15 механиз мом реверса перемещения, выполненным в виде Шайбы 25, шарнирно соединенно с рычагами 26, установленными на ося 27, жестко связанными с корпусом 8, Система работает следующим образо Управляющий блок 2 вычисляет разность эталонного значения контролиру мого параметра и величины, поступающей от датчика 1 и подает эту разнос .на электродвигатель 13. В качестве контролируемого параметра может использоваться угловое ускорение колеса (JU или величина относительного про дольного скольжения S. Вначале тормо жения разностьЧСр- Ш положительна. Поэтому электродвигатель 13, вращая винт штока 11, сжимает пружины 14 и 15, смещая точки срабатывания клапанов 9 и 10 ,в сторону повышения давления в полости 18, а следовательно, и в камере 5. Клапан 21 при этом закрыт давлением, поступающим от источника давления по магистрали б через полость 16 и канал 19 в полость 20. Повышение давления в камере 5 приводит к росту тормозного момента и колесо затормаживается. Вследствие этого растет величина ОУ, а значит 1Ц)-Шуменьшается, что природит к уменьшению скорости вращения электродвигателя 13. При достижении вели чиной (L значения СЛУр вращение электро двигателя 13 прекращается и наступает равномерное торможение автомобиля с расчетным замедлением , где г - радиус колеса. При случайных отклонениях (ip в,сторону увеличения разность Шр- iij становится отрицательной и эле тродвигатель вращается, в противоположном направлении, уменьшая величину сжатия пружин 14 и 15. При этом давление воздуха в полости 17 удерживает клапан 9 закрытым, а клапан ДО открывается, вследствие чего .давление в камере 5 уменьшается, величина тормо.зного момента снижается, что приводит к снижению величины (. Когда величина иЬ вернется к значению,ttp, вращение двигателя 13 прекращается и снова наступает равновесное состояние с постоянным давлением в приводе. Зависимости давления в приводе от величины (il обеспечиваемая предлагаемой системой, показана на фиг. 3. Величина иЬр (или Sp) задается при настройк е управлякхдего блока 2 , а величина Рр обеспечивается, как было показано выше, автоматически. Изменения давления в приводе в процессе устранения отклонений СО от Шр незначительны и не могут рассматриваться как пульсация. Несколько большая амплитуда пульсаций может возникнуть в переходном процессе в случае изменения коэффициента сцепления. Однако эти колебания быстро затухают, поскольку управляющее воздействие (сигналы блока 2) согласовано по величине и противоположно по направлению отклонению параметра. Описанная система позволяет практически устранить пульсацию давления в приводе, что повышает долговечность элементов привода и комфортабельность движения при торможении. Формула изобретения 1. Система автоматического управления торможением, состоящая из даттчика динамического состояния колеса, электронного управляющего блока и установленного в магистрали, сообщающей источник давления с тормозной камерой, модулятора давления с впускным и выпускным клапанами, связанными со штоком, установленным с возможностью осевого перемещения под действием привода, электрически связанного с электронным управляющим блоком, отличающаяся тем, что, с целью повышения долговечности элемен тов привода и комфортабельности движения при торможении путем устранения пульсаций давления, впускной и выпускной клапаны выполнены в виде клапанов постоянного перепада давления с переменной точкой срабатывания, зависящей от положения штока, а привод штока выполнен реверсивным, при этом величина скорости перемещения штока пропорциональна величине сигнала электрОнноЕО управляющего блока, а направление перемещения штока опреде лено полярностью сигнгша. 2. Система по п. 1, отлича ю щ а я с я тем, что привод выполнен в виде электродвигателя постоянного тока и передачи винт-гайка, связанной со штоком, который соединен клапанами через упругие элементы.
3. Система по п. 1, отличающаяся тем, что в магистрали, сообщающей модулятор с тормозной
камерой, установлен оттормаживакхаий клапан с управлением от источника давления.
Источники информации, принятые во внимание при экспертизе
1. Патент Франции 2033520, кл. В 60 Т 8/90, 1971.-.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЯТОР ЭЛЕКТРОННОЙ ТОРМОЗНОЙ СИСТЕМЫ | 2005 |
|
RU2314217C2 |
| Электропневматический тормозной привод транспортного средства большой грузоподъемности | 1990 |
|
SU1749086A1 |
| МОДУЛЯТОР ЭЛЕКТРОННО-ПНЕВМАТИЧЕСКОЙ ТОРМОЗНОЙ СИСТЕМЫ | 2008 |
|
RU2385241C2 |
| Пневматический тормозной привод прицепных колесных транспортных средств | 1982 |
|
SU1142330A1 |
| ПРОПОРЦИОНАЛЬНЫЙ МОДУЛЯТОР ЭЛЕКТРОННО-ПНЕВМАТИЧЕСКОЙ ТОРМОЗНОЙ СИСТЕМЫ | 2008 |
|
RU2385242C2 |
| КРАН МАШИНИСТА ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2631126C2 |
| Модулятор давления для пневматической противоблокировочной тормозной системы транспортного средства | 1982 |
|
SU1068311A1 |
| Система автоматического управления торможением | 1982 |
|
SU1049300A2 |
| Тормозная система прицепа | 1977 |
|
SU937250A1 |
| Тормозное управление многозвенного транспортного средства | 1980 |
|
SU910482A1 |
/да 17 / / / / I//
