(54) ПОЛОЧНЫЙ ЭЛЕВАТОР
I
Изобретение относится к промышленному транспорту, а именно к полочным элеваторам.
Известен полочный элеватор, включаюш,ий две пары параллельных тяговых цепей и прикрепленные к ним гибкие грузонесущие полки 1.
Недостатком этого элеватора является его неспособность перемещать грузы по замк. нутому контуру, а также низкая грузоподъемность.
Известен также полочный элеватор, включающий раму с приводными и отклоняющими звездочками, тяговые цепи, одна пара из которых имеет компенсационные изгибы, штанги, соединяющие тяговые цепи попарно, и грузонесущне полки, установленные на 15 штангах и снабженные роликами для перемещения по направляющим, расположенным на горизонтальных участках и имеющим вырезы для прохода цепей и роликов 2.
Однако известный элеватор имеет грузонесущие полки сложной конструкции.
Цель изобретения - повышение надежности работы.
Эта цель достигается тем, что грузонесущие полки снабжены П-образными скобами, жестко прикрепленными к ним своими концами, при этом полки подвешены посредством скоб на штангах, пропущенных через скобы с возможностью взаимодействия с их внутренней поверхностью в зонах компенсационных изгибов.
Кроме того, ролики и соответствующие им направляющие попарно размещены на разных расстояниях от оси симметрии грузонесущих полок.
10
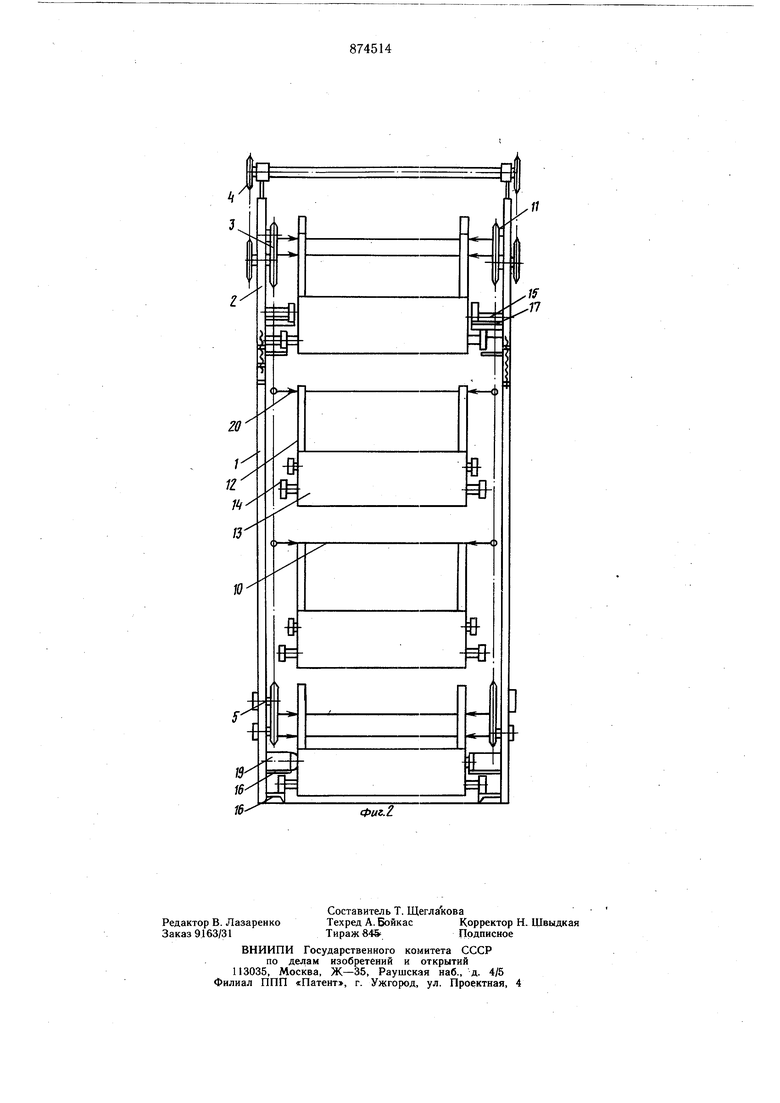
На фиг. 1 представлен элеватор, общий вид; на фиг. 2 - то же, вид сбоку.
На каркасе, образованном остовом 1 и рамой натяжного устройства 2, закреплены звездочки 3 привода 4, отклоняющие звездочки 5. На внутренней ветви, в месте сбегания цепи с прямолинейного участка, в целях высвобождения места по компенсатор установлены роликовые дорожки 6. На горизонтальных участках внутренней, ветви установлены ролики 7 для компенсационного изгиба цепи. На системе звездочек, роликов и роликовых дорожек размещены две внещние цепи 8 и две внутренние цепи 9 равной
длины и соответственно попарно соединенные штангами 10.
Чтобы исключить набегание внешней цепи на внутреннюю в процессе движения, на горизонтальных участках введены ролики 11, отклоняющие внешнюю ветвь от внутренней.
На противолежащих штангах 10 подвешена на П-образной скобе 12 полка 13, на боковинах которой смонтированы ролики 14 для транспортировки полки на,горизонтальных участках трассы по направляю1ДИМ 15 и 16.
Направляющие 15 крепятся к раме натяжного устройства 2 и имеют пазы 17 для прохождения штанг 10 внутренней ветви 9 цепи.
Для прохождения нижнего горизонтального участка полки роликом 14 направляющие 16 имеют вырез 18, снабженный щитком 19, который имеет два фиксированных положения.
Ролики 14 как и направляющие 15 и 16 относительно друг друга сдвинуты по вертикалям и имеют разные вылеты по отнощению к оси симметрии полки 13.
На штангах 10 предусмотрены ограничители 20, препятствующие боковому смещению полок 13 при прохождении вертикальных участков.
Для обеспечения натяжения всех цепей одновременно рама натяжного устройства 2 имеет возможность вертикального перемещения под действием домкратов, смонтированных на остове 1.
Элеватор работает следующим образом.
Загрузка осуществляется на ветви подъема. Полка занимает положение I. При включении двигате тя цепи начинают перемещаться в направлении, показанном стрелкой.
При движении от положения I к положению И полка 13 подвешена на штангах 10 и зафиксирована в четырех точках.
Проходя положение II полка 13 своими .роликами 14 набегает на направляющие 15, причем штанга 10 внутренней ветви 9 проходит в вырез 17, выполненный в направляющих. Вырезы 17 по отношению к ролику 14 полки имеют размеры, не препятствующие его прохождению по этому участку.
Ролики полки 14, как и направляющие 15 и 16, разнесены в вертикальной и горизонтальной плоскости, что позволяет полке при прохождении ею участка от положения П к положению III по наклонным плоскостям направляющих 15 вкатываться на их прямолинейные участки и занимать там положение, при котором скоба 12 превышает верхнюю точку изгиба внешней ветви 8 у ролика 11 и не препятствует штангам 10 внешней и внутренней ветви менять положение относительно скобы 12, не выходя из зонь1, ею ограниченной.
Следует обратить внимание, что в положении I и II в момент подъема скоба 12
полки зацеплена левым углом со штангой 10 внешней ветви 8, а правым - со штангой 10 внутренней ветви 9. Двигаясь из положения II к положению 1П до места расположения первого отклоняющего ролика 7, полка 13 полностью фиксируется своими роликами 14 на направляющих 15, а штанги 10 ветвей уже не поддерживают ее, а служат лишь средством перемещения по направляющим. До положения III ведущей является штанга 10 внутренней ветви 9.
Штанга Ю.внещней ветви, перемещаясь по своей трассе и не выходя из зоны, ограниченной скобой 12, перемещается из левого угла скобы 12 в первый. Одновременно штанга 10 внутренней цепи 9 внутри этой зоны перемещается из правого угла захвата в левый, так что в положении III полка 13 остается неподвижной до тех пор, пока штанга 10 внешней цепи 8 не переместится в правую сторону скобы 12 и не начнет дальнейшее перемещение полки 13 в положение IV. В это время щтанга 10 внутренней ветви 9 подходит к левому углу скобы 12. В дальнейшем, перемещаясь под действием штанги 10 внешней ветви 8, полка 13 в положении IV (на чертеже показана пунктирной линией) сходит с направляющих и зависает на штангах 10 ветвей, но теперь уже левым углом на щтанге 10 внутренней ветви 9, а правым - на штанге внешней.
Перемена местоположения связей ветвей относительно скобы 12 позволяет поддерживать полку 13 на вертикальных участках в подвешенном состоянии и исключает пересечение ветвей по трассе.
В положении V полка 13 продолжает свое движение уже к нижнему прямолинейному участку.
Из положения VI в положение VII полка перемещается под действием штанги 10 внутренней ветви 9. При движении полки 13 из положения VI в положение VII щиток 19 под действием ролика 14 закрывается и позволяет полке переместиться через вырез 18. В этом положении полка 13 внешней ветви 8 не переместится из правого угла скобы 13 в левый, а штанга 10 внутренней ветви 9, благодаря сложной трассе компенсационного изгиба, образованной системой роликов 7, не переместится из левого угла скобы 13 в правый.
Двигатель под действием штанги 10 внешней ветви 8 переходит из положения VII в положение I, полка своими скобами 12 зависает на противостоящих щтангах 10 и начинает подниматься.
Описанное выполнение элеватора ynpqщает его конструкцию.
Формула изобретения
1. Полочный элеватор, включающий остов с приводными и отклоняющими звездочками, тяговые цепи, одна пара из которых
имеет компенсационные изгиёы, штанги, соединяющие тяговые цепи попарно, -и грузонесущие полки, установленные на штангах и снабженные роликами для перемещения по направляющим, расположенным на горизонтальных участках и имеющим вырезы для прохода цепей и роликов, отличающийся тем, что, с целью повыщения надежности работы, грузонесущие полки снабжены П-образными скобами, жестко прикрепленными к ним своими концами, при этом полки подвещены посредством скоб на штангах, пропущенных через скобы i с вбзможностью взаимодействия с их внутренней поверхностью в зонах компенсационных изгибов.
2. Элеватор по п. I, отличающийся тем, что ролики и соответствующие им направляющие попарно размещены на разных расстояниях от оси симметрии грузонесущих полок.
Источники информации, принятые во внимание при экспертизе
1.Сниваковский А. О. и др. Ттранспортирующие машины. М., «Машиностроение, 1968, с. 222.
2.Авторское свидетельство СССР по заявке № 2149214, кл. В 65 G 17/06, 1975 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛОЧНЫЙ ЛЕНТОЧНЫЙ ЭЛЕВАТОР | 2009 |
|
RU2406672C1 |
| Полочный элеватор | 1986 |
|
SU1330049A1 |
| Полочный элеватор | 1979 |
|
SU880899A1 |
| Полочный элеватор для изделий в виде тел вращения | 1980 |
|
SU935393A1 |
| Полочный элеватор | 1985 |
|
SU1308529A1 |
| Полочный элеватор | 1988 |
|
SU1565787A1 |
| Полочный элеватор | 1981 |
|
SU1002205A1 |
| КОЛЬЦЕВОЙ КОНВЕЙЕР | 2003 |
|
RU2255031C1 |
| Полочный элеватор | 1979 |
|
SU825397A1 |
| Полочный элеватор | 1977 |
|
SU631394A1 |
20
/
/Г
-
Фм..
