Изобретение относится к промышленному транспорту, а именно к полочным элеваторам.
Целью изобретения является повышение надежности погрузки-разгрузки.
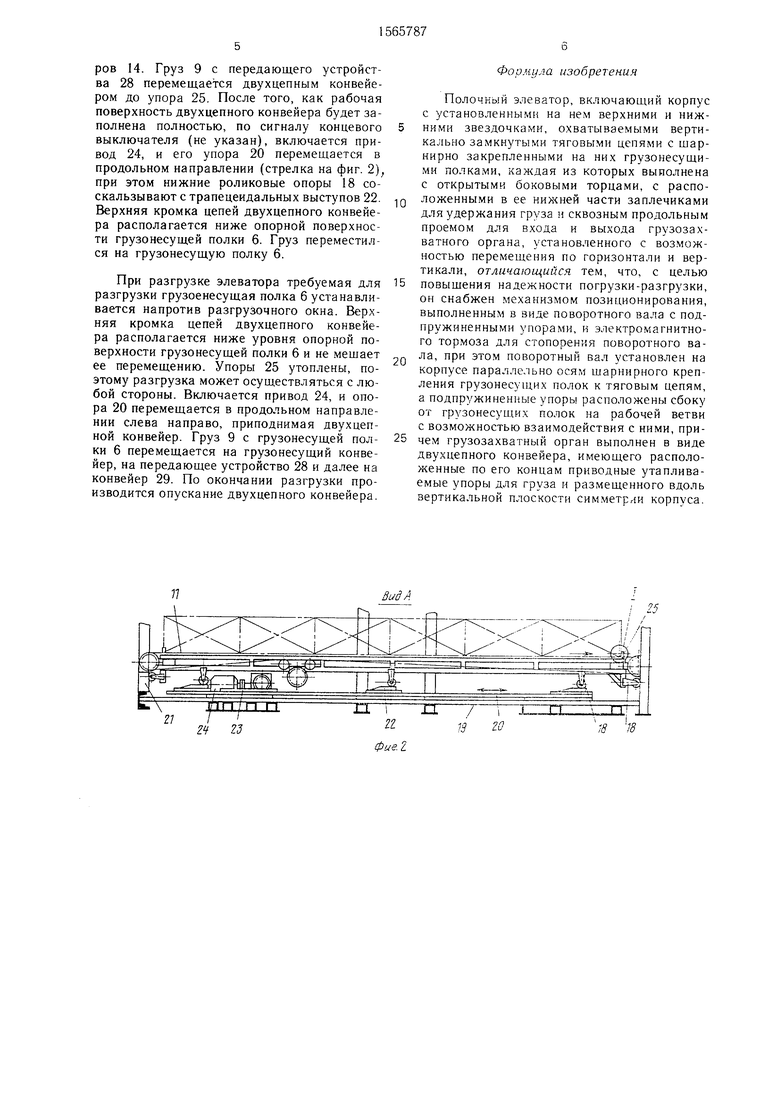
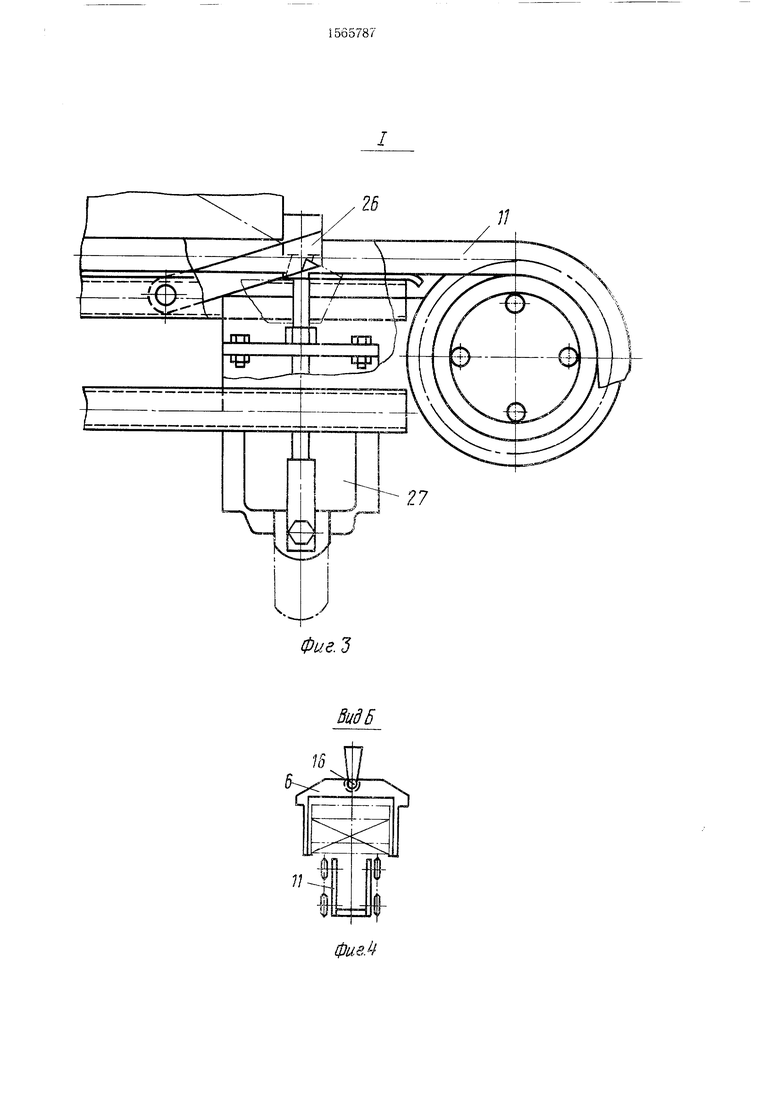
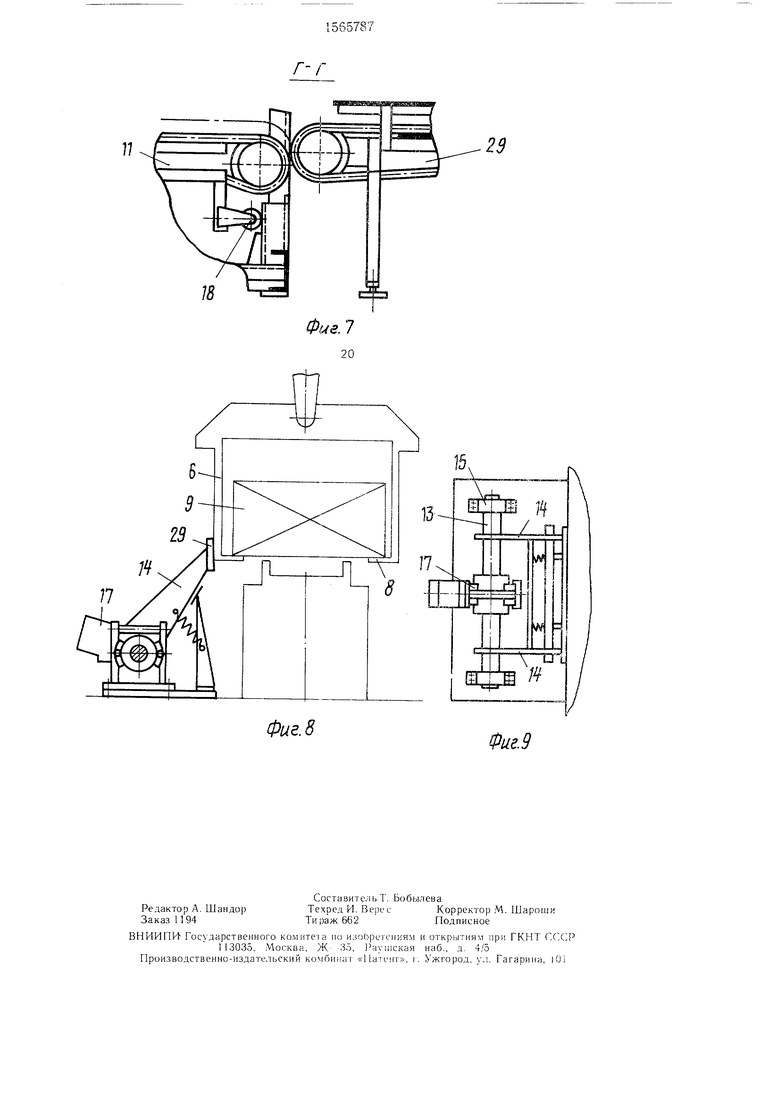
На фиг. 1 изображен полочный элеватор, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - узел I на фиг. 2; на фиг. 4 - вид Б на фиг. 1; на фиг. 5 - примеры установки полочных элеваторов в различных технологических схемах хранения и переработки груза; на фиг. 6 - разрез В-В на фиг. 5; на фиг. 7 - разрез Г-Г на фиг. 5 (варианты стыковки различных транспортирующих устройств с грузозахватным органом); на фиг. 8 и 9 - подпружиненные упоры, общий вид.
Полочный элеватор содержит корпус 1, на котором смонтированы верхние 2 и нижние 3 звездочки, попарно соединенные горизонтальными валами, установленными в подшипниковых опорах 4. Каждая пара звездочек 2, 3 связана между собой вертикальными замкнутыми тяговыми цепями 5, на которых шарнирно подвешены грузонесу- щие полки 6. Причем, грузонесущие полки 6 шарнирно подвешены к кронштейнам 7, жестко прикрепленным к звеньям тяговых цепей 5.
Грузонесущие полки 6 выполнены каждая с открытыми боковыми торцами, а в нижней части - заплечиками 8 для удержания груза 9 и сквозным продольным проемом 10 для входа и выхода грузозахватного органа 11, установленного с возможностью движения по горизонтали и вертикали.
Привод 12 вращения нижней звездочки 3 снабжен тормозным устройством (неуказан) для остановки элеватора при установке гру- зонесущей полки 6 в требуемое положение. Для фиксации грузонесущей полки 6 в этом положении элеватор снабжен устройством позиционирования,выполненным из поворотного вала 13 с подпружиненными упорами 14, смонтированного на корпусе в стационарных подшипниковых опорах 15 параллельно осям 16 шарнирного крепления грузонесу- щих полок 6, и электромагнитного тормоза 17 для стопорения поворотного вала 13. При этом, подпружиненные упоры расположены сбоку от грузонесущих полок 6 на рабочей ветви с возможностью взаимодействия с ними.
0 Грузозахватный орган И выполнен в виде двухцепного конвейера, установленного посредством роликовых опор 18 на стационарной раме 19 со смонтированными на ней опорой 20 и двумя вертикальными направляющими 21. Опора 20 имеет три тра5 пецеидальных выступа 22 и зубчатую часть 23, связанную со звездочкой привода 24. Двухцепной конвейер связан со стационарной рамой роликовыми опорами 18, две из них связаны с вертикальными направ0 ляющими 21, а три других - с трапецеидальными выступами 22. Двухцепной конвейер оснащен приводными утапливаемыми упорами 25 для накопления груза по всей длине двухцепного конвейера при загрузке. Упоры 25 представляют собой шарнирно
5 закрепленную на корпусе двухцепного конвейера упорную рамку 26, подъем и опускание которой происходит под действием тягового электромагнита 27. Привод (не указан) двухцепного конвейера установлен на стационарной раме и связан с ведущим
0 валом этого конвейера.
Двухцепной конвейер размещен вдоль вертикальной плоскости симметрии корпуса 1. Передача груза 9 к разгрузочно- загрузочному окну и перемещение его к эле5 ватору осуществляются с помощью передающих устройств 28 или конвейером 29.
Полочный элеватор работает следующим образом.
При загрузке груз 9 (пакеты, ящики и 0 т. п.) доставляется к загрузочно-разгрузоч- ному окну с помощью конвейера 29 и устанавливается на передающем устройстве 28. Привод 12 приводит в движение элеватор и останавливается при его отключении тормозным устройством в момент подхода сво- 5 бодной грузонесущей полки 6 в положение напротив загрузочного окна. Окончательная ее фиксация в требуемом положении производится с помощью подпружиненных упоров 14. Груз 9 с передающего устройства 28 перемещается двухцепным конвейером до упора 25. После того, как рабочая поверхность двухцепного конвейера будет заполнена полностью, по сигналу концевого выключателя (не указан), включается привод 24, и его упора 20 перемещается в продольном направлении (стрелка на фиг. 2) при этом нижние роликовые опоры 18 соскальзывают с трапецеидальных выступов 22. Верхняя кромка цепей двухцепного конвейера располагается ниже опорной поверхности грузонесущей полки 6. Груз переместился на грузонесущую полку б.
При разгрузке элеватора требуемая для разгрузки грузоенесущая полка 6 устанавливается напротив разгрузочного окна. Верхняя кромка цепей двухцепного конвейера располагается ниже уровня опорной поверхности грузонесущей полки 6 и не мешает ее перемещению. Упоры 25 утоплены, поэтому разгрузка может осуществляться с любой стороны. Включается привод 24, и опора 20 перемещается в продольном направлении слева направо, приподнимая двухцеп- ной конвейер. Груз 9 с грузонесущей пол- ки 6 перемещается на грузонесущий конвейер, на передающее устройство 28 и далее на конвейер 29. По окончании разгрузки производится опускание двухцепного конвейера.
Q
5 5
0
Формула изобретения
Полочный элеватор, включающий корпус с установленными на нем верхними и нижними звездочками, охватываемыми вертикально замкнутыми тяговыми цепями с шар- нирно закрепленными на них грузонесущи- ми полками, каждая из которых выполнена с открытыми боковыми торцами, с расположенными в ее нижней части заплечиками для удержания груза и сквозным продольным проемом для входа и выхода грузозахватного органа, установленного с возможностью перемещения по горизонтали и вертикали, отличающийся тем, что, с целью повышения надежности погрузки-разгрузки, он снабжен механизмом позиционирования, выполненным в виде поворотного вала с подпружиненными упорами, и электромагнитного тормоза для стопорения поворотного вала, при этом поворотный вал установлен на корпусе параллельно осям шарнирного крепления грузонесущих полок к тяговым цепям, а подпружиненные упоры расположены сбоку от грузонесущих полок на рабочей ветви с возможностью взаимодействия с ними, причем грузозахватный орган выполнен в виде двухцепного конвейера, имеющего расположенные по его концам приводные утапливаемые упоры для груза и размещенного вдоль вертикальной плоскости симметрии корпуса.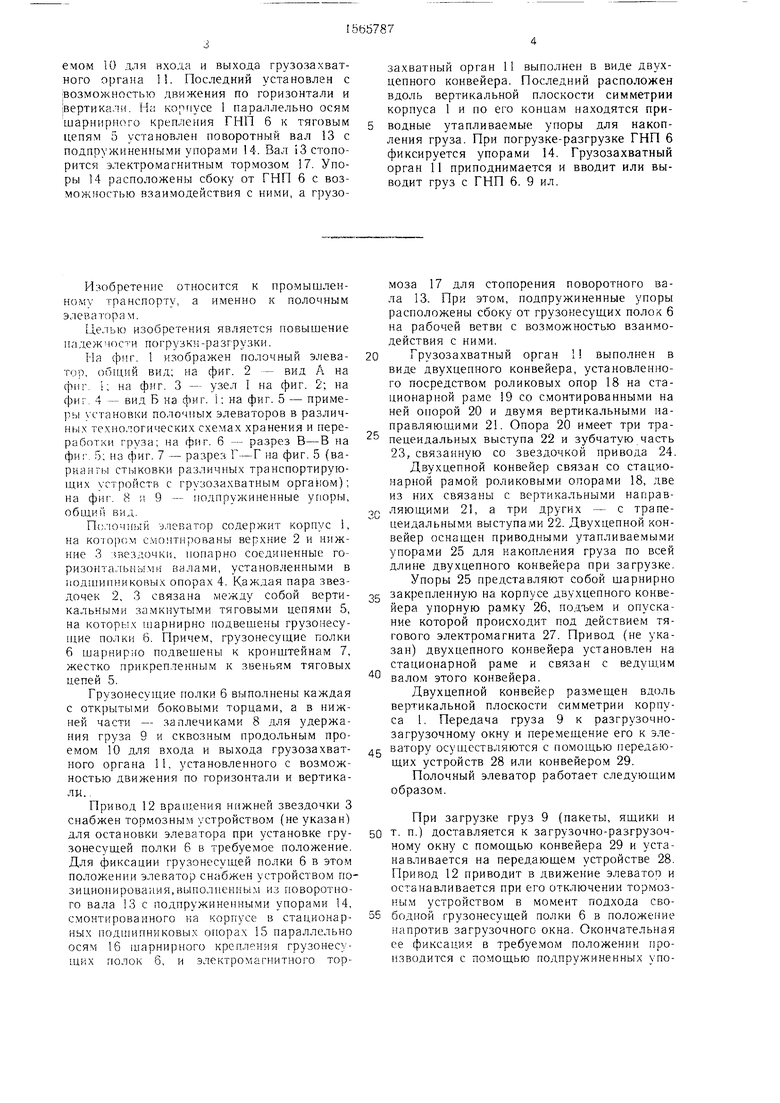
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛОЧНЫЙ ЛЕНТОЧНЫЙ ЭЛЕВАТОР | 2009 |
|
RU2406672C1 |
| ЭЛЕВАТОР ДЛЯ КУСКОВЫХ ГРУЗОВ | 2004 |
|
RU2272770C1 |
| ВЕРТИКАЛЬНЫЙ ЭЛЕВАТОР ДЛЯ КУСКОВЫХ ГРУЗОВ | 2004 |
|
RU2272771C1 |
| Вертикальный конвейер для штучных грузов | 1988 |
|
SU1602814A1 |
| Штабелер для обслуживания полочных стеллажей | 1982 |
|
SU1031860A1 |
| Элеватор для штучных грузов | 1987 |
|
SU1511181A1 |
| Элеватор | 1980 |
|
SU876519A1 |
| Полочный элеватор | 1985 |
|
SU1247320A1 |
| ЛЮЛЕЧНЫЙ ВЫСТУПОДВУЛЕНТОЧНЫЙ ЭЛЕВАТОР | 1993 |
|
RU2079424C1 |
| Вертикальный элеватор для штучных грузов цилиндрической формы | 1985 |
|
SU1283177A1 |
Изобретение относится к промышленному транспортру, в частности к полочному элеватору, и позволяет повысить надежность погрузки-разгрузки. На корпусе 1 элеватора установлены верхние 2 и нижние 3 звездочки, охватываемые вертикально замкнутыми тяговыми цепями 5. На цепях 5 шарнирно подвешены грузонесущие полки (ГНП) 6, каждая из которых выполнена с открытыми боковыми торцами, а в нижней части - с заплечиками 8 для удержания груза и сквозным продольным проемом 10 для входа и выхода грузозахватного органа 11. Последний установлен с возможностью движения по горизонтали и вертикали. На корпусе 1 параллельно осям шарнирного крепления ГНП 6 к тяговым цепям 5 установлен поворотный вал 13 с подпружиненными упорами 14. Вал 13 стопорится электромагнитным тормозом 17. Упоры 14 расположены сбоку от ГНП 6 с возможностью взаимодействия с ними, а грузозахватный орган 11 выполнен в виде двухцепного конвейера. Последний расположен вдоль вертикальной плоскости симметрии корпуса 1 и по его концам находятся приводные утапливаемые упоры для накопления груза. При погрузке-разгрузке ГНП 6 фиксируется упорами 14. Грузозахватный орган 11 приподнимается и вводит или выводит груз с ГНТ 6. 9 ил.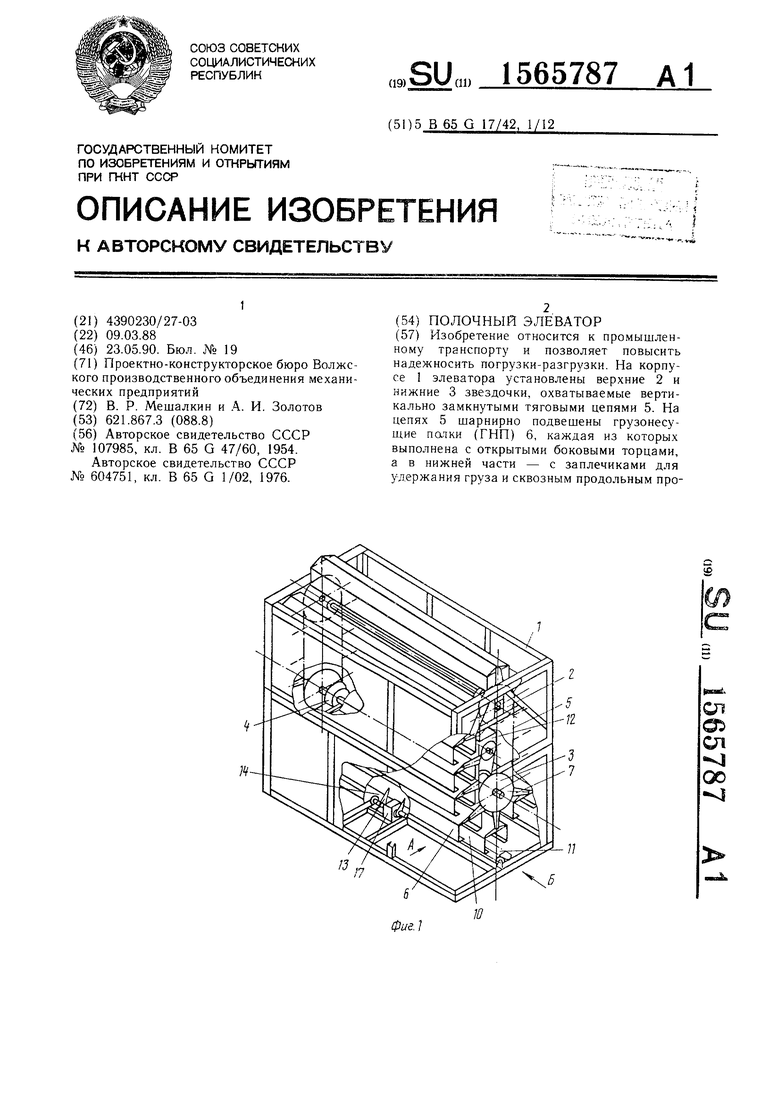
г 1,
Фиг.Ъ
16
йЗ
;;
фиг b
91
Ч
T/
T
s
f
8- S
i
R
ill
Jl
/j III
1
Л i J
f f
Щ
I
ж
4
1/-ПЛ
V
«z
д-эпф
82 SZ
l
§
§
L ЕЕГ
TTf J i L
У /
i
1
Z8ZS9SI
18
Фиа.1
Фиг. 8
Фиг.9
| Автоматическое вертикальное сушило | 1954 |
|
SU107985A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Элеваторный накопитель грузов | 1976 |
|
SU604751A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
