Изобретение относится к промышленному транспорту, а именно к полочному элеватору.
Цель изобретения - повышение надежности.
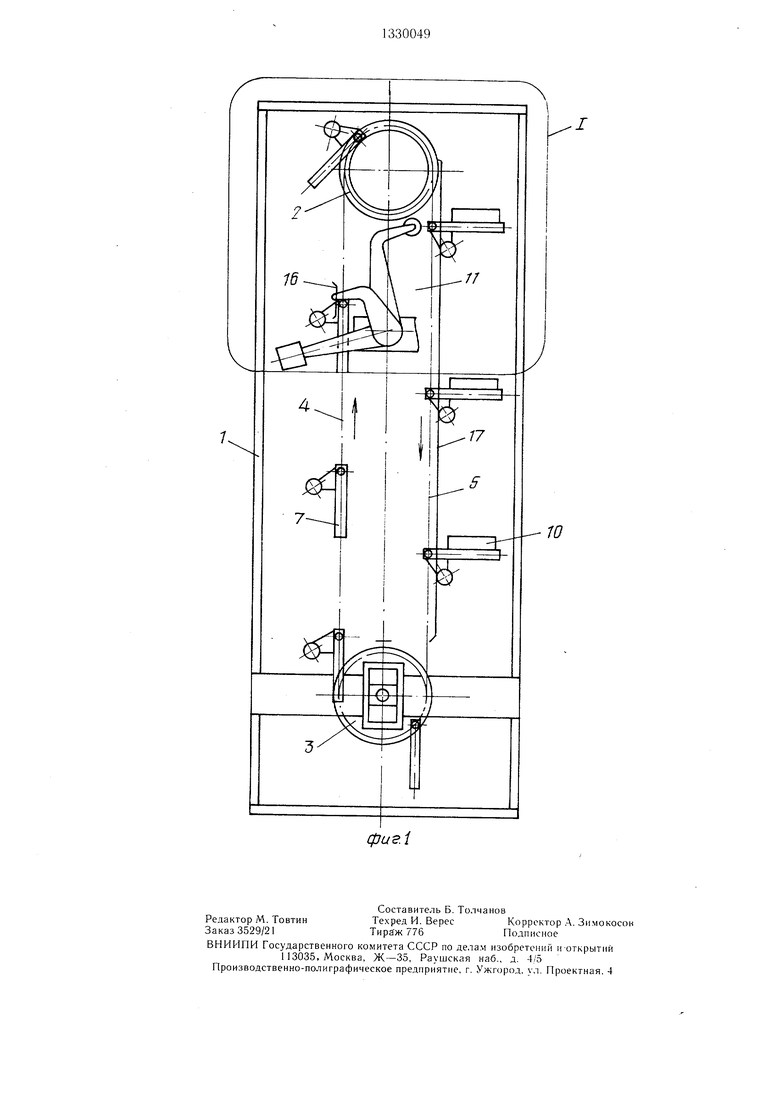
На фиг. 1 изображен полочный элеватор, общий вид; па фиг. 2 - механизм опрокидывания грузопесущих полок, узел 1 на фиг. 1.
Полочный элеватор содержит раму 1, на которой смонтированы приводная 2 и натяжная 3 звездочки, через которые проходят синхронно перемещающиеся бесконечные холостые 4 и грузонесущие 5 ветви тяговых цепей. На тяговых цепях посредством шарниров 6 закреплены откидные грузонесущие полки 7 с роликами 8, установленными на оси шарниров 6 и роликами 9, установленными на нижней поверхности грузонесущих полок 7. Верхняя поверхность грузонееущих полок 7 является опорной для груза 10.
На раме 1 расположен механизм опрокидывания грузонесущих полок 7, выполненный в виде двуплечего рычага 11 с противовесом 12, шарнирно закрепленного на раме 1. Одно плечо 13 двуплечего рычага 11 выполнено Г-образным с возможностью взаимодействия е роликами 8 грузонесущих полок 7, находящихся на холостых 4 ветвях тяговых цепей, а другое выполнено с роликом 14 на конце, расположенпым с воз- можпостыо взаимодействия с опорными поверхностями 15 грузонесущих полок 7, находящихся на грузонесущих ветвях 5 тяговых цепей. На холостой ветви 4 установлены направляюндие 16 для роликов 8 грузонесущих полок 7, а на гр узонесущей ветви 5 - направляющие 17 для роликов 9, ориентирующих грузонесущие полки 7 в рабочее положение. На оси приводной звездочки установлен барабан 18.
Полочный элеватор работает следующим образом.
При включении привода элеватора вращение передается приводной звездочке 2, которая перемещает холостую 4 и грузопе- сущую 5 ветви тяговой цепи с установленными на них грузонесущими полками 7. При переходе грузонесун1,их полок 7 через натяжную звездочку 3 с грузонесущей ветви 5 на холостую ветвь 4 ролик 9 грузонесущей полки 7 сходит с направляющей 17 и грузонесущая полка 7 разворачивается относительно И1арпира 6 из горизонтального рабочего положения в вертикальное нерабочее и в этом положении транспортируется по холостой ветви цепи 4.
При переходе цепи через приводную звездочку 2 грузонесущая полка 7, перемещаясь по барабану 18 и совершая вращательное движение вокруг щарпира 6, переводится из своего нерабочего вертикального положения на холостой ветви 4 в рабочее горизонтальное положение на грузонесущей ветви 5. Для гарантированного поворота грузонесупхих полок 7 в горизонтальное положение иепользуется механизм опрокидывания.
При перемещении грузонесущей полки 7
0 на холостой ветви 4 вверх она своим роликом 8 попадает в направляющую 16, упирается в Г-образное плечо 13 и принудительно, за счет тягового усилия тяговой цепи, поворачивает двуплечий рычаг 11 па
с оси по часовой стрелке. При этом другое плечо двуплечего рычага 11 своим роликом 14 взаимодействует с опорной поверхностью грузонесущей полки 7, которая, обогнув барабан 18, находится на грузонесущей ветви 5 тяговой цепи и поворачивает грузонесущую
0 полку 7 вокруг шарнира 6 в горизонтальное рабочее положение.
Одновременно ролик 9 попадает на направляющую 17 и, опираясь на нее, обеспечивает устойчивое горизонтальное положе5 ние грузонесущей полки 7. После этого грузопесущая полка 7 готова к приему груза 10. При дальпейщем перемещении грузонесущей полки 7 на холостой ветви 4 ролик 8, отклонив Г-образное плечо 13, перестает взаимодействовать с ним. Освободив шийся от взаимодействия с роликом 8 двуплечий рычаг 11 возвращается под действием противовеса 12 в исходное положение.
Формула изобретения
35
Полочный элеватор, включающий раму с направляющими приводными и натяжными звездочками, две параллельные тяговые цепи с шарнирно закрепленными на них грузонесущими полками с опорными поверхностя40 ми для груза на одних сторонах и роликами для обкатывания по направляющим на других сторонах и механизм опрокидывания грузонесущих полок, отличающийся тем, что, с целью повьинения надежности, механизм опрокидывания грузоне 5 сущих полок выполнен в виде двуплечего рычага с противовесом, шарнирно закрепленного на раме, одно плечо которого выполнено Г-образным с возможностью взаи модействия с роликами грузонесущих полок на холостой ветви тяговых цепей, а другое выполнено с роликом на конце, расположенным с возможностью взаимодействия с опорными поверхностями грузонесущих полок на грузонесущей ветви тяговых цепей.
50
Составитель Б. Толчанов
Редактор М. ТовтинТехред И. ВересКорректор А. Знмокосон
Заказ 3529/21Тира ж 776Подписное
ВНИИПИ Государственного комитета СССР по делам изобретепий и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
фиеЛ
| название | год | авторы | номер документа |
|---|---|---|---|
| Полочный элеватор | 1979 |
|
SU880899A1 |
| ПОЛОЧНЫЙ ЛЕНТОЧНЫЙ ЭЛЕВАТОР | 2009 |
|
RU2406672C1 |
| Полочный элеватор | 1979 |
|
SU825397A1 |
| Полочный элеватор | 1980 |
|
SU874514A1 |
| Полочный элеватор | 1985 |
|
SU1308529A1 |
| Полочный элеватор для изделий в виде тел вращения | 1980 |
|
SU935393A1 |
| Полочный элеватор | 1981 |
|
SU1002205A1 |
| Полочный элеватор | 1988 |
|
SU1565787A1 |
| ВЕРТИКАЛЬНЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2007 |
|
RU2352510C1 |
| Конвейер | 1979 |
|
SU885764A1 |
Изобретение относится к нромышлен- ному транспорту, а именно к полочному элеватору. Целью изобретения является повышение надежности. На раме 1 элеватора смонтированы приводная 2 и натяжная звездочки. Через звездочки проходят синхронно перемещающиеся бесконечные холостые 4 и грузонесущие 5 ветви тяговых цепей. На цепях шарнирами 6 закреплены откидные грузонесущие полки (ГП) 1 с роликами (Р) 8 на оси шарниров 6. На нижней поверхности ГП 7 ycTaiiOiJ.ienbi 0. Верхняя гювер.хность ГН 7 является onopoii для груза. На раме 1 расположен iexa- низ.м опрокидывания ГП 7, выполненный в виде двуплечего рычага (ДР) с противовесом 12. Одно плечо ДР выполнено Г-об- разным с возможностью взаимодействия с Р 8 на ветви 4. Другое плечо ДР выпо. 1- нено с Р 14 на конце, расположенным с возможностью взаи.модействия с опорными поверхностями 15 ГП 7 на ветви 5. При перемещении ГП 7 на ветви 4 вверх Р 8 попадает в направляющую 16, упирается в Г-образное плечо 13 и поворачивает ДР по часовой стрелке. Другое плечо ДР своим Р 14 взаимодействует с опорной поверхностью ГП 7 на ветви 5 и поворачивает ГП 7 вокруг шарнира 6 в горизонтальное рабочее положение. При этом Р 9 попадает на направляющую 17 и обеспечивает устойчивое горизонтальное положени ГП 7. 2 ил. СО со ОО о о N со / фиг 2
| Патент США № 2869708, кл | |||
| Складная решетчатая мачта | 1919 |
|
SU198A1 |
| Автоматический сцепной прибор американского типа | 1925 |
|
SU1959A1 |
| Устройство для сбора и выгрузки мусора в транспортные средства | 1980 |
|
SU880893A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
