в
в
00
о
00 СП
ю
со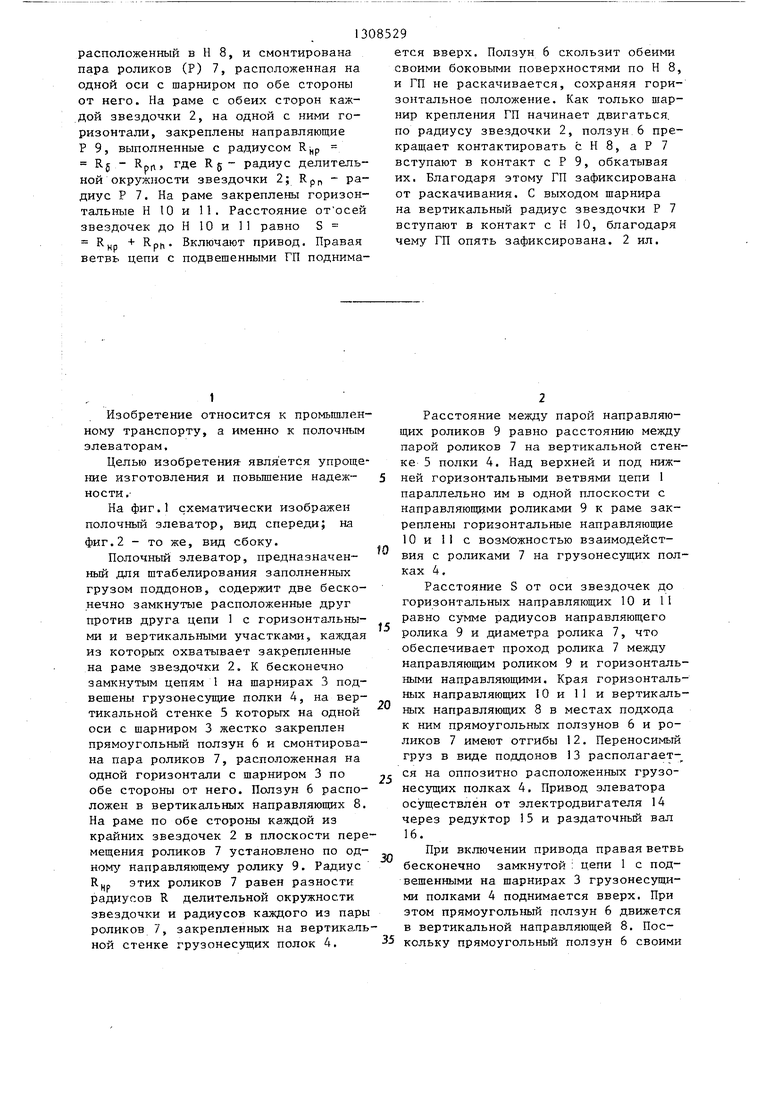
| название | год | авторы | номер документа |
|---|---|---|---|
| Полочный элеватор | 1981 |
|
SU1002205A1 |
| Вертикальный элеватор для штучных грузов цилиндрической формы | 1985 |
|
SU1283177A1 |
| Полочный элеватор | 1986 |
|
SU1330049A1 |
| СУДОВОЙ ДВУСТОРОННИЙ ЛЮЛЕЧНЫЙ ЭЛЕВАТОР ДЛЯ ТРАНСНОРТИРОВКИ ШТУЧНЫХ ГРУЗОВ | 1973 |
|
SU372132A1 |
| Конвейер для вертикального перемещения грузов | 1985 |
|
SU1305073A1 |
| Вертикальный цепной конвейер | 1985 |
|
SU1315368A1 |
| Полочный элеватор | 1979 |
|
SU880899A1 |
| Ленточно-цепной конвейер | 1987 |
|
SU1490035A2 |
| Горизонтально замкнутый тележечный конвейер | 1985 |
|
SU1258778A1 |
| Полочный элеватор | 1988 |
|
SU1565787A1 |
Изобретение относится к промыш- ленному транспорту и позволяет упростить изготовление и повысить надежность элеватора. На его раме установлены вертикальные направляющие (Н) 8 и звездочки 2, охваченные бесконечно замкнутыми цепями. На цепях, имеющих вертикальные и горизонтальные участки, на шарнирах подвешены грузонесу- щие полки (ГП). На.вертикальной стенке ГП жестко закреплен на одной оси с шарниром прямоугольный ползун 6, (Л
расположенный в Н 8, и смонтирована пара роликов (Р) 7, расположенная на одной оси с шарниром по обе стороны от него. На раме с обеих сторон каждой звездочки 2, на одной с ними горизонтали, закреплены направляющие Р 9, выполненные с радиусом Rj - Rp, где Kg- радиус делительной окружности звездочки 2; Кр, - радиус Р 7. На раме закреплены горизонтальные Н 10 и П. Расстояние от осей звездочек до Н 10 и 11 равно S + RptT Включают привод. Правая ветвь цепи с подвешенными ГП поднима,1
Изобретение относится к промьш1лен ному транспорту, а именно к полочным элеваторам.
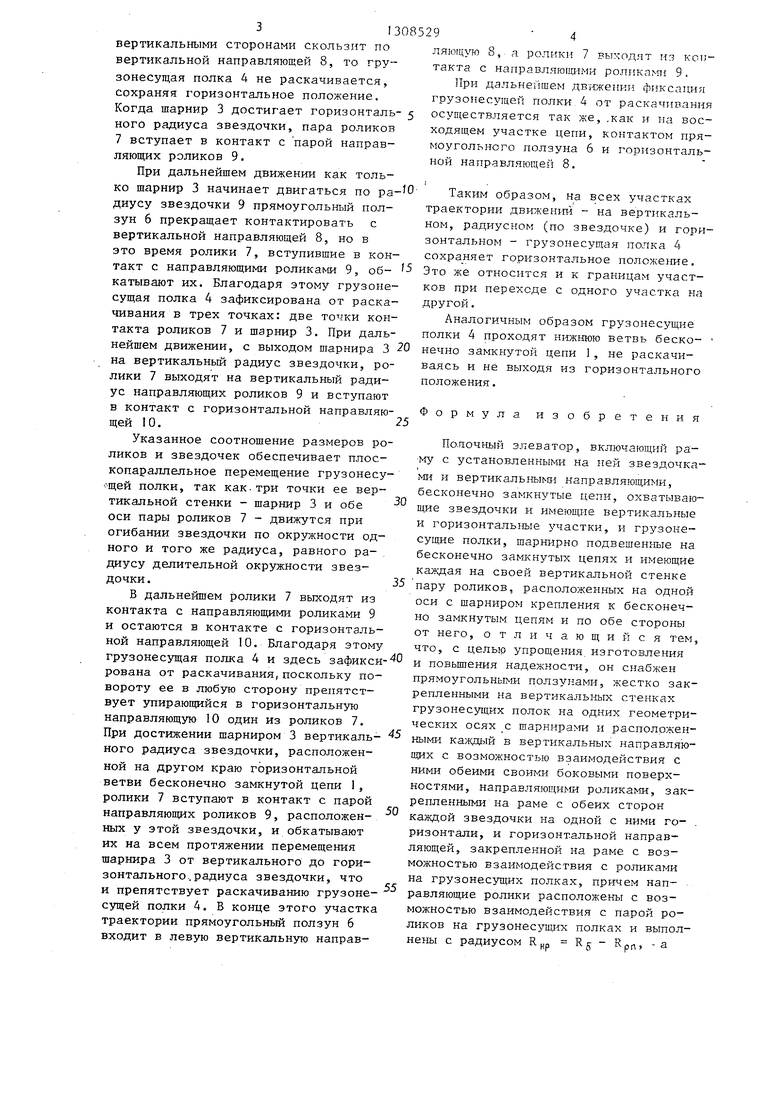
Целью изобретения явля ется упрощение изготовления и повьшгение надежности.На фиг.1 схематически изображен полочный элеватор, вид спереди; на фиг.2 - то же, вид сбоку.
Полочный элеватор, предназначенный для штабелирования заполненных грузом поддонов, содержит две бесконечно замкнутые расположенные друг против друга цепи 1 с горизонтальными и вертикальными участками, каждая из которых охватывает закрепленные на раме звездочки 2. К бесконечно замкнутым цепям 1 на шарнирах 3 подвешены грузонесущие полки 4, на вертикальной стенке 5 которых на одной оси с шарниром 3 жестко закреплен прямоугольный ползун 6 и смонтирована пара роликов 7, расположенная на одной горизонтали с шарниром 3 по обе стороны от него. Ползун 6 расположен в вертикальных направляющих 8. На раме по обе стороны каждой из крайних звездочек 2 в плоскости перемещения роликов 7 установлено по одному направляющему ролику 9. Радиус RJIP этих роликов 7 равен разности радиусов R делительной окружности звездочки и радиусов каждого из пары роликов 7, закрепленных на вертикальной стенке грузонесущих полок 4.
ется вверх. Ползун 6 скользит обеими своими боковыми поверхностями по Н 8, и ГП не раскачивается, сохраняя горизонтальное положение. Как только шарнир крепления ГП начинает двигаться, по радиусу звездочки 2, ползун 6 прекращает контактировать с Н 8, а Р 7 вступают в контакт с Р 9, обкатывая их. Благодаря этому ГП зафиксирована от раскачивания. С выходом шарнира на вертикальный радиус звездочки Р 7 вступают в контакт с Н 10, благодаря чему ГП опять зафиксирована. 2 ил.
Расстояние между парой направляющих роликов 9 равно расстоянию между парой роликов 7 на вертикальной стенке 5 полки 4. Над верхней и под ниж- Н€;й горизонтальными ветвями цепи 1 параллельно им в одной плоскости с направляющими роликами 9 к раме закреплены горизонтальные направляющие 10 и 11 с возм ожностью взаимодействия с роликами 7 на грузонесущих полках 4.
Расстояние S от оси звездочек до горизонтальных направляющих 10 и 11 равно сумме радиусов направляющего ролика 9 и диаметра ролика 7, что обеспечивает проход ролика 7 между направляющим роликом 9 и горизонтальными направляющими. Края горизонтальных направляюшсих 10 и 11 и вертикаль- ных направляющих 8 в местах подхода к ним прямоугольных ползунов 6 и роликов 7 имеют отгибы 12. Переносимый груз в виде поддонов 13 располагает- ся на оппозитно расположенных грузонесущих полках 4. Привод элеватора осуществлен от электродвигателя 14 через редуктор 15 и раздаточньш вал 16.
При включении привода правая ветвь бесконечно замкнутой : цепи 1 с подвешенными на шарнирах 3 грузонесущи- ми полками 4 поднимается вверх. При этом прямоугольный ползун 6 движется в вертикальной направляющей 8. Пос- кольку прямоугольный ползун 6 своими
вертикальными сторонами скользит по вертикальной направляющей 8, то гру- зонесущая полка 4 не раскачивается, сохраняя горизонтальное положение.
Когда шарнир 3 достигает горизонталь- 5 осуществляется так же,.как и на восного радиуса звездочки, пара роликов 7 вступает в контакт с парой направляющих роликов 9.
При дальнейшем движении как только шарнир 3 начинает двигаться по диусу звездочки 9 прямоугольный ползун 6 прекращает контактировать с вертикальной направляющей 8, но в это время ролики 7, вступившие в конходящем участке цепи, контактом прямоугольного ползуна 6 и горизонтальной направляюгдей 8,
(
Таким образом, на всех участках траектории движении -- на вертикальном, радиусном (по звездочке) и горизонтальном - грузонесущая полка 4 сохраняет горизонтальное положение.
такт с направляющими роликами 9, об- - Это же относится и к границам участкатывают их. Благодаря этому грузонесущая полка 4 зафиксирована от раскачивания в трех точках: две точки контакта роликов 7 и шарнир 3. При дальнейшем движении, с выходом шарнира 3 20 нечно замкнутой цепи 1, не раскачина вертикальный радиус звездочки, ролики 7 выходят на вертикальный радиус направляющих роликов 9 и вступают в контакт с горизонтальной направляющей 10.
Указанное соотношение размеров роликов и звездочек обеспечивает плоскопараллельное перемещение грузонесу- щей полки, так как-три точки ее вертикальной стенки - шарнир 3 и обе оси пары роликов 7 - движутся при огибании звездочки по окружности одного и того же радиуса, равного радиусу делительной окружности звездочки.
В дальнейшем ролики 7 выходят из контакта с направляющими роликами 9 и остаются в контакте с горизонтальной направляющей 10. Благодаря этому
25
30
35
ваясь и не выходя из горизонтально положения.
Формула изобретени
Полочный элеватор, включающий р му с установленными на ней звездоч №1 и вepтикaль aI a направляющими, бесконечно замкнутые цели, охватыв щие звездочки и имеющие вертикальн и горизонтальные участки, и грузон сущна полки, шарнирно подвешенные бесконечно замкнутых цепях и имеющ каждая на своей вертикальной стенк пару роликов, расположенных на одн оси с шарниром крепления к бесконе но замкнутым цепям и по обе сторон от него, о т л и ч а ю щ и f; с я т что, с целыр упрощершя изготовлени
грузонесущая полка 4 и здесь зафикси- 0 и повьшения надежности, он снабжен
рована от раскачивания,поскольку повороту ее в любую сторону препятствует упирающийся в горизонтальную направляющую 10 один из роликов 7. При достижении шарниром 3 вертикаль- кого радиуса звездочки, расположенной на другом краю горизонтальной ветви бесконечно замкнутой цепи 1, ролики 7 вступают в контакт с парой направляющих роликов 9, расположенных у этой звездочки, и обкатывают их на всем протяжении перемещения шарнира 3 от вертикального до горизонтального., радиуса звездочки, что и препятствует раскачиванию грузонесущей полки 4. В конце этого участка траектории прямоугольный ползун 6 входит в левую вертикальную направ
ляющую 8,. а ролики 7 выходят из контакта с направляюгцими роликами 9.
При дальнейшем движении фиксация грузонесущей полки 4 от раскачивания
ходящем участке цепи, контактом прямоугольного ползуна 6 и горизонтальной направляюгдей 8,
(
Таким образом, на всех участках траектории движении -- на вертикальном, радиусном (по звездочке) и горизонтальном - грузонесущая полка 4 сохраняет горизонтальное положение.
ков при переходе с одного участка на другой.
Аналогичным образом грузонесзлцие полки 4 проходят нижнюю ветвь беско
ваясь и не выходя из горизонтального положения.
Формула изобретения
Полочный элеватор, включающий раму с установленными на ней звездочка- №1 и вepтикaль aI a направляющими, бесконечно замкнутые цели, охватывающие звездочки и имеющие вертикальные и горизонтальные участки, и грузоне- сущна полки, шарнирно подвешенные на бесконечно замкнутых цепях и имеющие каждая на своей вертикальной стенке пару роликов, расположенных на одной оси с шарниром крепления к бесконечно замкнутым цепям и по обе стороны от него, о т л и ч а ю щ и f; с я тем, что, с целыр упрощершя изготовления
и повьшения надежности, он снабжен
прямоугольными ползунами, жестко закрепленными на вертикальных стенках грузонесущих полок на одних геометрических осях с шарнирами и расположенными каждый в вертикальных направляющих с возможностью взаимодействия с ними обеими своими боковыми поверхностями, направляющими роликами, закрепленными на раме с обеих сторон каждой звездочки на одной с ними го- . ризонтали, и горизонтальной направляющей, закрепленной на раме с возможностью взаимодействия с роликами на грузонесущих полках, причем направляющие ролики расположены с возможностью взаимодействия с парой роликов на грузонесущих полках и выполс радиусом R
нр
RS R
рП
- а
513085296
расстояние от осей звездочек до гори- где R - радиус делительной окружнос- зонтальной направляющей равноти звездочки;
Rpn - радиус роликов на грузонесу- щей полке.
нр нр рп
| Патент США № 1984685, кл | |||
| Складная решетчатая мачта | 1919 |
|
SU198A1 |
| Полочный элеватор | 1980 |
|
SU865721A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
