(54) ПРИВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ СНИЖЕНИЯ ЖЕСТКОСТИ ТРАНСМИССИИ МАШИННО-ТРАКТОРНОГО АГРЕГАТА | 2008 |
|
RU2398147C1 |
| Привод | 1985 |
|
SU1260608A1 |
| Манипулятор | 1983 |
|
SU1094734A1 |
| Механизм поворота колонны стрелового манипулятора | 2015 |
|
RU2610848C1 |
| ПОВОРОТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1991 |
|
RU2010767C1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ С РАСПОЛОЖЕНИЕМ ПОРШНЕЙ ПАРАЛЛЕЛЬНО ОСИ ВРАЩЕНИЯ РОТОРА | 2003 |
|
RU2278284C2 |
| Схват робота | 1981 |
|
SU994256A1 |
| Привод манипулятора | 1985 |
|
SU1293018A1 |
| Стенд для исследования цилиндропоршневой группы двигателя внутреннего сгорания | 1982 |
|
SU1163182A1 |
| Система управления транспортного средства | 1985 |
|
SU1311954A1 |
Изобретение относится к робототехнике. Известен привод, например, манипулятора, содержащий двигатель, зубчатое звено, шестерню, обкатыванщуюся по зубчатому звену и соединенную с тормозным механизмом С Недостатками известного привода являются низкие динамические характеристики за счет жесткого измейеНИН тормозного момента и малый диапазон регулирования этих характеристгапс. Эти недостатки устраняются тем, что тормозной механизм состоит из цилиндра с дроссельным регулированием на штоке которого установлена пружина с клиношаройьм усилителем, а на гильзе клиношарового усилителя выполнен усилителыай разжимной элемент причем иа корпусе тормозного механизма установлена с возможностью вращения от шестерни втулка, внутри которой расположен разжимной элемент Цель .изобретения - улучшение динамических характеристик улучшение плавности изменения тормозного момента, увеличение скорости перемещения привода, уменьшение амплитуды колебаний привода), увеличение диапазона регулирования в широком диапазоне изменение времени разгона и торможения привода, увеличение изменения замедленной скорости, ускорение процесса изменения точности позиционирования) и универсальности (возможность работы как в цикловом, так и в позиционном режимах). Поставленная цель достигается тем, что в приводе манипулятора, содер- жащего двигатель зубчатое звено, шестерню, обкатывающуюся по зубчатому звену и соединенную с тормозным механизмом, тормозной механизм имеет цилиндр с дроссельным регулированием на выходе, воздействующий на пружину, передающую возрастанндее усилие клиношаровому усилителю, деист вухчему на усилительный разжимной элемент создающий тормозной момент трения на внутренней поверхности вращающейся втулки связанной с обкатывающейся по зубчатому звену шестерней шлицеш 1м соединением
Воздействие цилиндра, постепенно нагружакнцехю или разгружающего пружину с последующим усилением этого воздействия клиношаровьо и усилительным разжнмшлм элементом, позволяет плавно изменять и регулировать тормозной момент, тем самым активно воздействуя на привод.
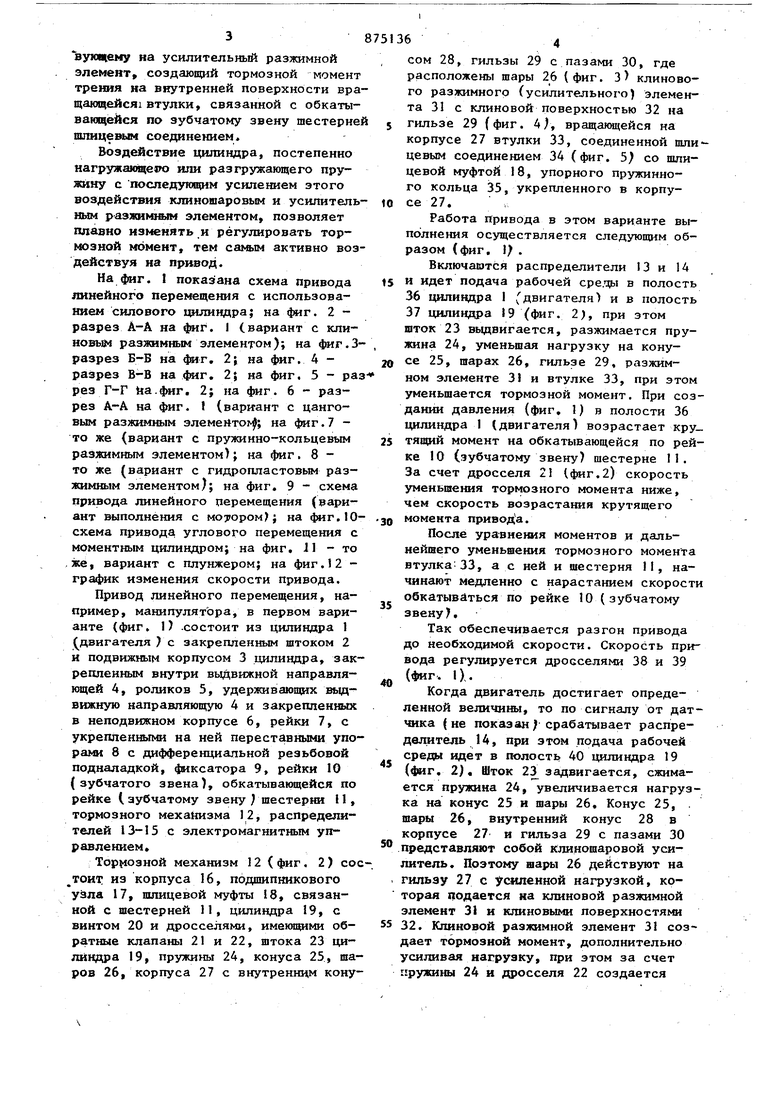
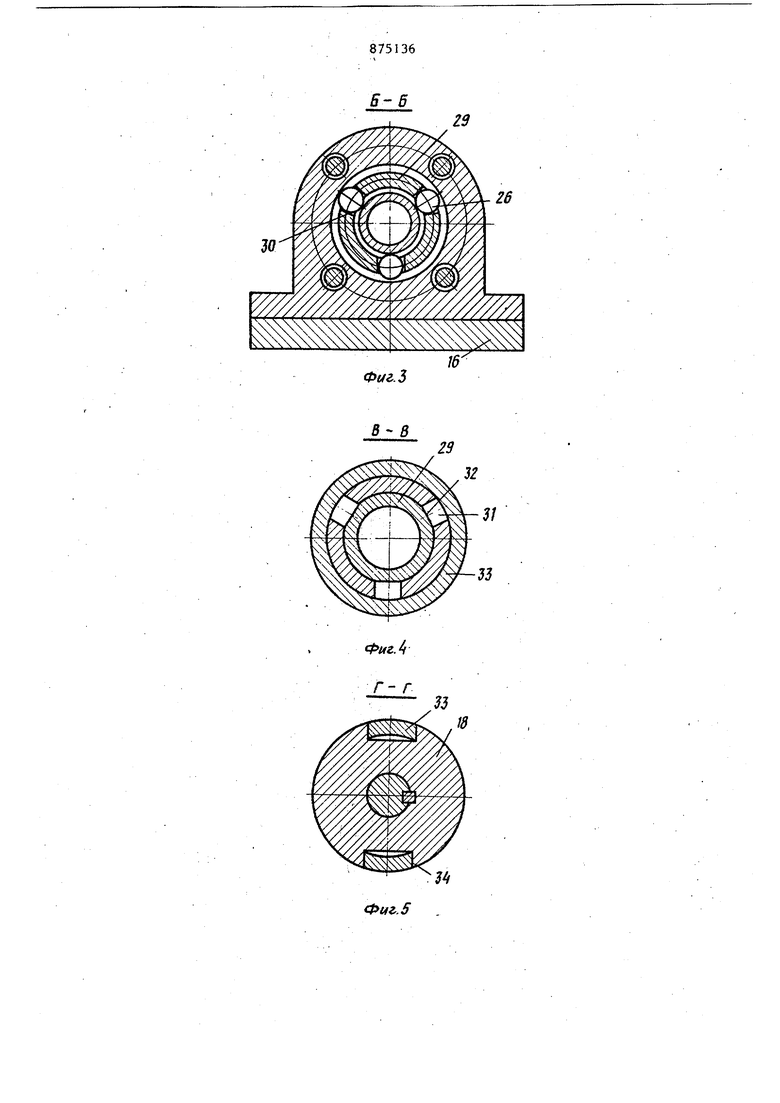
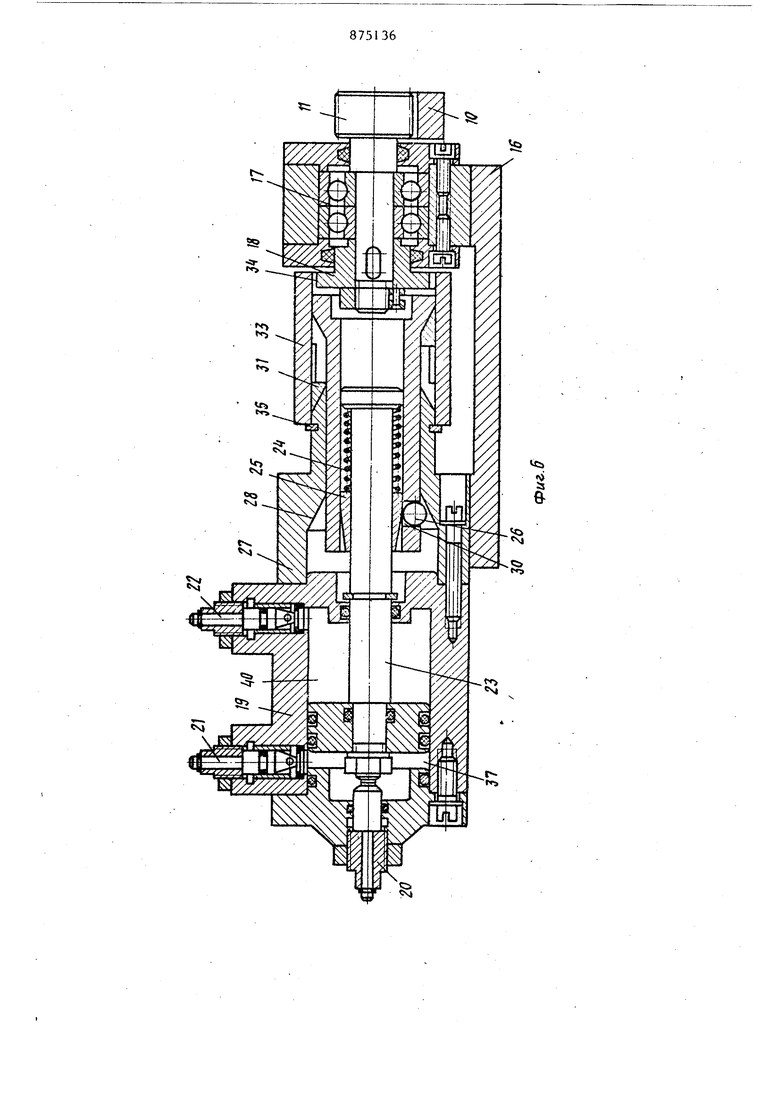
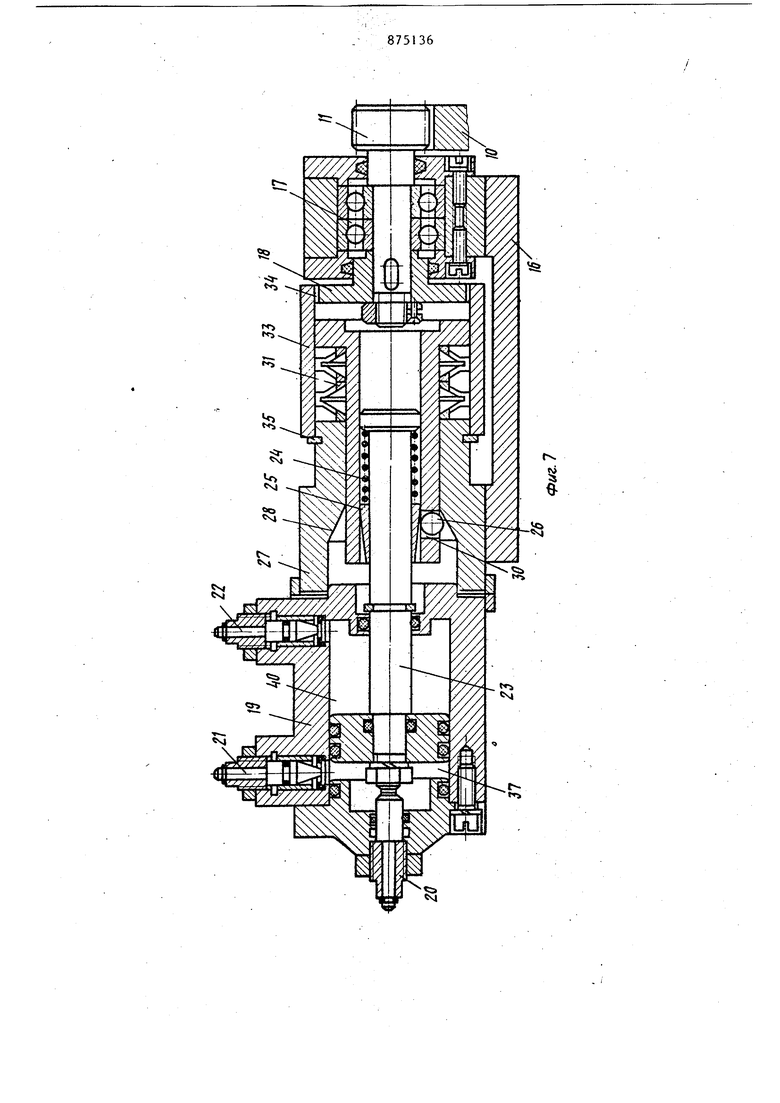
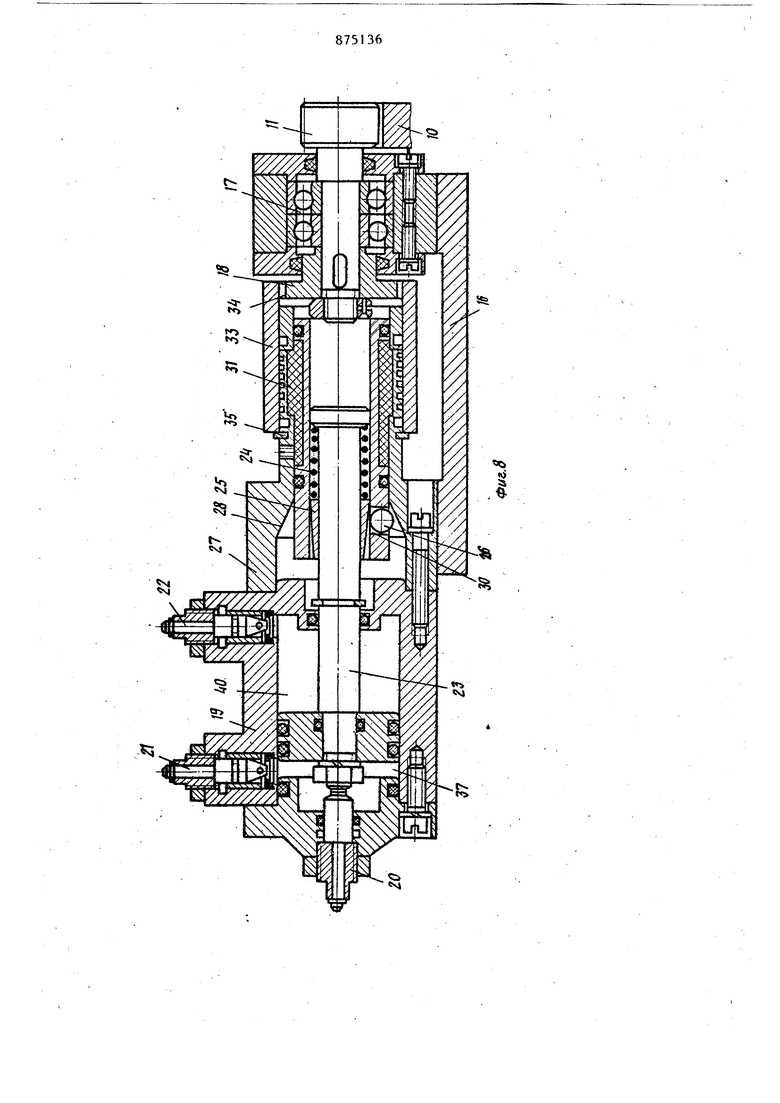
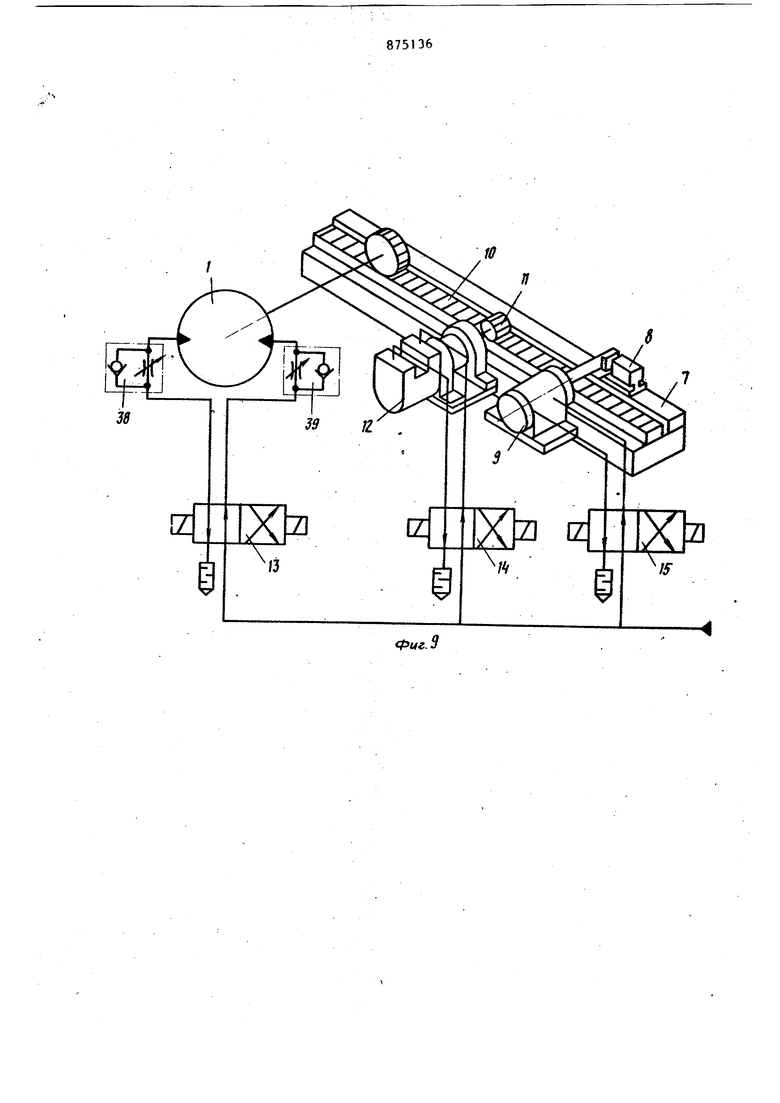
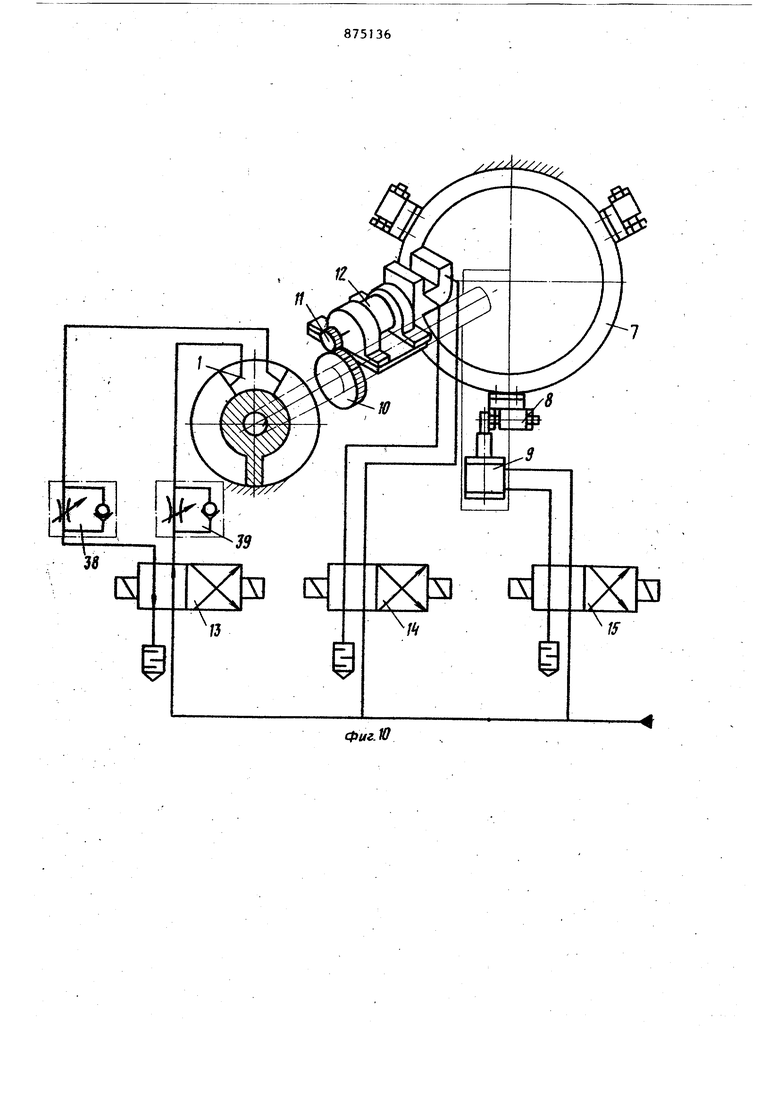
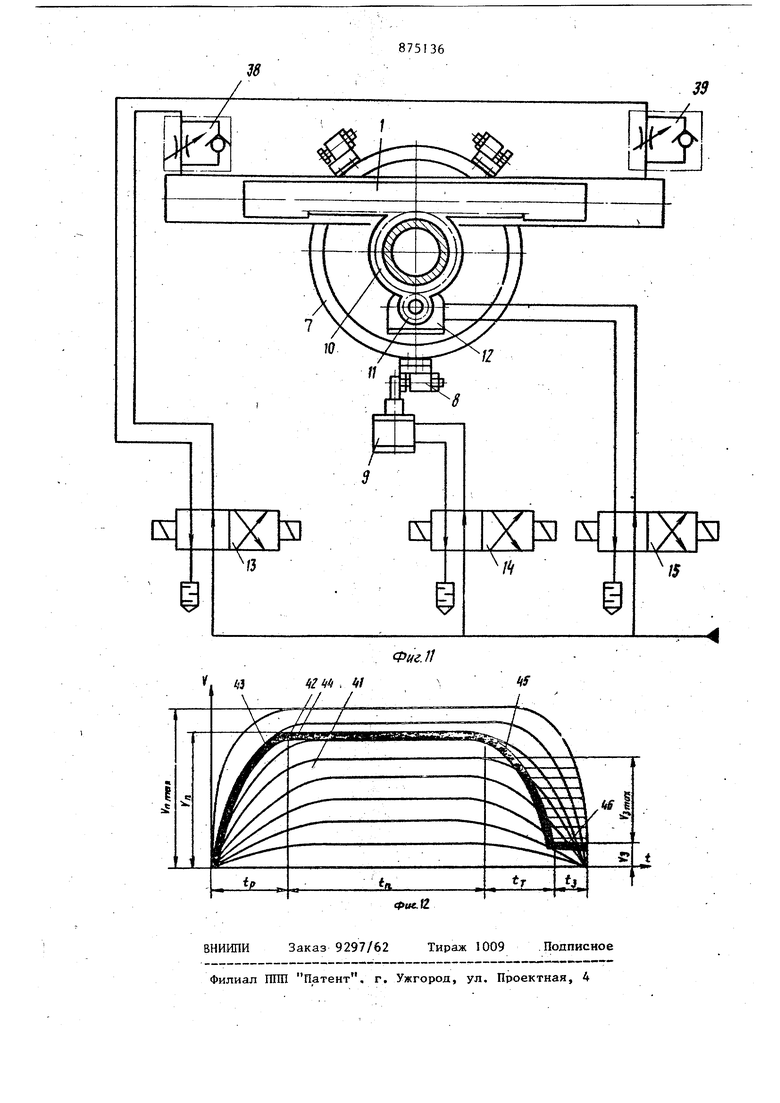
На фиг. 1 показана схема привода линейного перемещения с использованием силового щшиндра; на . 2 разрез А-А на фиг. I (вариант с клиновь М разжимным элементом); на фиг.Зразрез Б-Б на фиг, 2; на фиг. 4 разрез В-В на 4к1г. 2; на фиг. 5 - раз рез Г-Г tia.(|Mr. 2; на фиг. 6 - разрез А-А на фиг. (вариант с цанговым разжимным элемейто ; на фиг. 7 то же (вариант с пружинно-кольцевым разжимным элементом); на фиг. 8 то же (вариант с гидропластовым разжимным элементом); на фиг. 9 - схема привода линейного перемещения (вариант выполнения с мотором ; на г.10схема привода углового перемещения с моментным цилиндром; на фиг. 11 - то ,же, вариант с плунжером; на фиг.12 график изменения скорости привода.
Привод линейного перемещения, например, манипулятора, в первом варианте (фиг. П -СОСТОИТ из цилиндра 1 (двигателя } с закрепленным штоком 2 и подвижным корпусом 3 цилиндра, закрепленным внутри выдвижной направляющей 4, роликов 5, удерживающих выдвижную направляющую 4 и закреплендаж в неподвижном корпусе 6, рейки 7, с укре1шен1шми на ней переставными упорамл В с дифференциальной резьбовой подналадкой, фиксатора 9, рейки 10 (зубчатого звена), обкатывакицейся по рейке (зубчатому звену шестерки 11, тормозного механизма 12, распределителей 13-15 с электромагнитным управлением.
Тормозной механизм 1 2 ( фиг . 2 ) сое тоит из корпуса 16, подщипникового узла 17, шлицевой муфты 18, связанной с шестерней П, цилиндра 19, с винтом 20 и дросселями, имеющими обратные клапаны 21 и 22, штока 23 цилИндра 19, пружины 24, конуса 25, шаров 26, корпуса 27 с внутренним конуСОМ 28, гильзы 29 с пазами 30, где расположены шары 26 (фиг. З) клинового разжимного (усилительного) элемента 31 с клиновой поверхностью 32 на гильзе 29 (фиг. 4, вращающейся на корпусе 27 втулки 33, соединенной шлицевым соединением 34 (фиг. 5 со шлицевой муфтой 18, упорного пружинного кольца 35, укрепленного в корпусе 27.
Работа привода в этом варианте выполнения осуществляется следующим образом (фиг. 1 .
Включаются распределители 13 и 14 и идет подача рабочей среда в полость
36цилиндра I двигателя) и в полость
37цилиндра 19 (фиг. 2), при этом шток 23 выдвигается, разжимается пружина 24, уменьшая нагрузку на конусе 25, шарах 26, гильзе 29, разжимном элементе 31 и втулке 33, при этом уменьшается тормозной момент. При создании давления (фиг. 1) в полости 36 цилиндра 1 (двигателя) возрастает крутящий момент на обкатывающейся по рейке 10 (зубчатому звену) шестерне 11. За счет дросселя 2 (фиг.2) скорость уменьшения тормозного момента ниже, чем скорость возрастания крутящего момента приводка.
После уравнения моментов и дальнейшего уменьшения тормозного момента втулка:33, ас ней и шестерня II, начинают медленно с нарастанием скорости обкатываться по рейке 10 (зубчатому звену К
Так обеспечивается разгон привода до необходимой скорости. Скорость привода регулируется дросселями 38 и 39 (фиг. 1),.
Когда двигатель достигает определенной величины, то по сигналу от датчика (не показан срабатывает распределитель 14, при этом подача рабочей среды идет в полость 40 цилиндра 19 (фиг. 2), Шток 23 задвигается, сжимается пружина 24, увеличивается нагрузка на конус 25 и шары 26. Конус 25, . шары 26, внутренний конус 28 в корпусе 27 и гильза 29 с пазами 30 представляют собой клиношаровой усилитель. Поэтому шары 26 действуют на . гильзу 27 с уошенной нагрузкой, которая подается на клиновой разжимной элемент 31 и клиновыми поверхностямн 32. Клиновой разжимной элемент 31 соз дает тормозной момент, дополнительно усиливая нагрузку, при этом за счет гфужины 24 и дросселя 22 создается 5 постепенность возрастания тормозного момента. Вращение втулки 33 приостанавливается, а с ней приостанавливается и вращение шестерни 11, обкатывающейся по. рейке 10 (фиг.О, а следовательно, приостанавливается пе ремещение подвижного корпуса 3 цилиндра и направляющей 4. Так обеспечивается торможение при вода до регулируемого положения винта 20 (фиг. 2) или до полной .постановки привода не по упорам 8, а позиционно. В случае циклового режима при достижении определенного тормозного момента, привод на замедпенной скорости останавливается фиксатором 9 по упорам 8. Количество точек остановки практически может быть любое Показанные на фиг. 2,6,7 и 8 варианты приводов с тормозным злементом отличаются по конструкции выполнением усилительного разжимного элемента 31 причем приводы по своим тор мозным характеристикам несколько перекрывают друг друга. В целом эти механизмы представляют собой гамму, охватывающую большой диапазон тормозных моментов. Принцип построения приводов линейного перемещения с использованием мо тора (фиг, 9i приводов, углового пере мещения с использованием моментного цилиндра (фиг.10) и то же с использованием плунжера (фиг. 1) одинакои с описанным вьш1е принципом построения привода линейного перемещения с использованием силового цилиндра, а также имеют несколько вариантов ис пблнения усилительного разжимного эл мента.. Перемещение привода манипулятора (фиг. 1, 9 и П) от одного упора 8 до другого упора 8 согласно цикла работ производится по регулируемому закону в области 41. На графике(фиг изображена кривая 42, показывающая изменение скорости V перемещения при вода в зависимости от времени t, на котором имеем следующие графические обозначения; tp - время разгона привода; t у, - время перемещения привода с постоянной скоростью; t - время торможения привода; to - время перемещения на земедленной скорости; V. - скорость перемещения привода 66 Y - максимальная скорость передвижения привода; максимальная замедпенная ско рость перемещения привода. Кривая 42 состоитгиз участков 43-47 Участок 43 кривой 42 соответствует изменению скорости разгона привода. Изменение этой скорости можно регулировать с помощью дросселя 22 с обратным клапаном (фиг. 2). Участок 44 (фиг.12) соответствует скорости перемещения привода Vyj . Изменение этой скорости можно производить дросселями 38 и 39 (фиг.1). Участок 45 (фиг. 12) соответствует изменение скорости торможения. Изменение этой скорости можно регулировать с помощью дросселя 21 с обратным клапаном (фиг. 2). Участок 46 кривой 42 (фиг.12) соответствует замедленной скорости перемещения привода V-J. Изменение замедленной скорости можно производить БИНТОМ 16 (фиг.2). Участок 47 кривой 42 (фиг.12) соответствует потере замедленной скорости при взаимодействии фиксатора 9 (фиг.1) и упора 8. Плавное регулирование разгона и торможения за счет плавности изменения тормозного момента, позволяет в целом повысить скорость перемещения привода и скоратить время работы привода, особенно эффективно при больших перемещениях, например, элементов манипулятора. Возможность работы привода как в цикловом, так и в позиционном режимах обеспечивается за счет системы управления и снятием упоров 8 или фиксатора 9 в отдельных случаях (фиг. U. Использование предлагаемого изобретения позволит улучшить плавность изменения тормозного момента, увеличить скЭрость перемещения привода и улучшить другие параметры привода. Формула изобретения Привод, .например, манипулятора, содержащий двигатель, зубчатое звено шестерню, обкатывающуюся по зубчатому звену и соединенную с тормозным механизмом, от, личающийся тем, что, с целью улучшения динамических характеристик и увеличения диапазона регулирования этих характеристик, тормозной механизм состоит 13 цилиндра с дроссельным регули7рованиему на штоке которого установлена пружина с клиношаровым усилителеМу а на гильзе, клиношарового ус .лителя выполнен усилительный разжимной элемент, причем на корпусе тормозного механизма установлена с возможностью вращения шестерни втулки,
Я . jgu fT
-ч -Ч
И -г 751368 внутри которой расположен разжимной элемент. Источники информации, принятые во вш1мание при экспертизе 5 1. Мишкинд С. И. и др. Развитие робототехники за рубежом. Обзор НЙИмяш, серия С-1, М,0 1976, с.29-30.
30
26
Фе/г.З
Id
S
фиг.З
