Изобретение относится к машиностроению и может быть использовано для получения линейных реверсивных перемещений с остановками исполнительного механизма, например, в промышленных роботах (манипуляторах).
Цель изобретения - повышение точности позиционирования путем соЕшещеиия в тормозном механизме привода функций тормоза и демпфера.
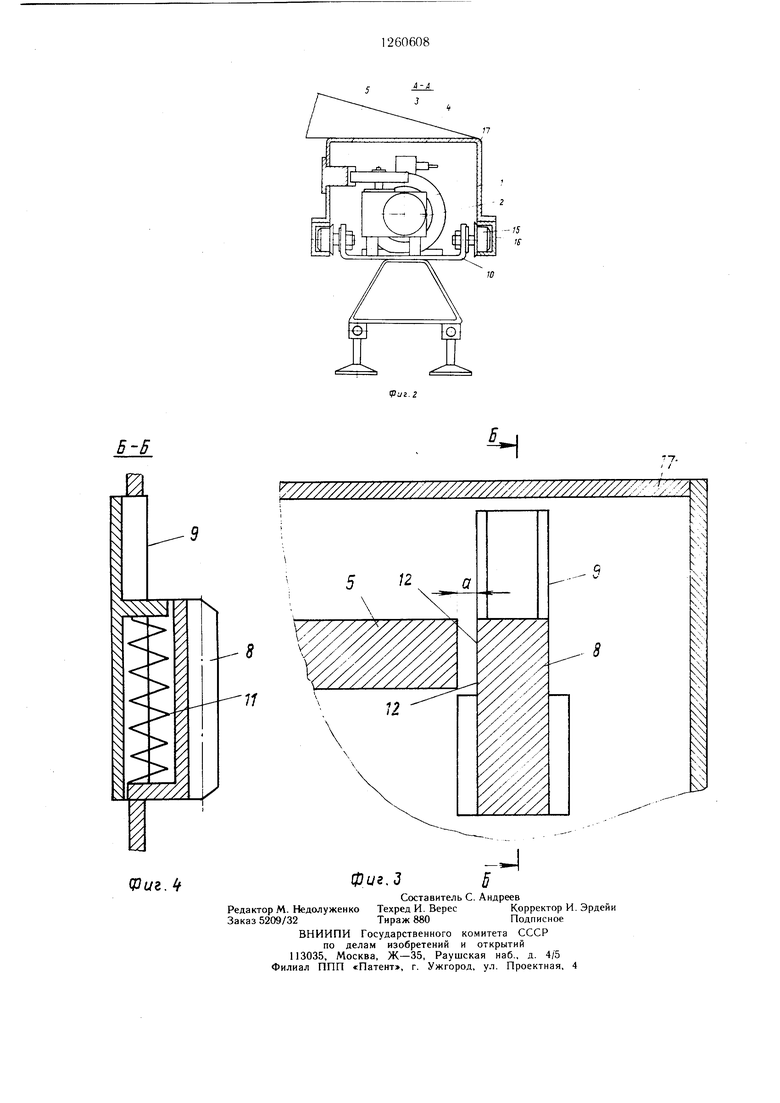
На фиг.1 изображен привод, общий вид; на фиг.2 - разрез А-А на фиг.1; на фиг.З - правый тормозной механизм; на фиг.4 - разрез Б-Б на фиг.З.
Привод состоит из двигателя , соединенного с червячным редуктором 2, на выход- ном валу 3 которого закреплена косозубая шестерня 4, обкатывающаяся по зубчатому звену-рейке 5. По краям рейки 5 расположены тормозные механизмы 6 и 7, каждый из которых состоит из рейки 8, установленной в направляющих 9 перпендикулярно рейке 5 и направлению перемещения подвижного звена 10. Рейка 8 подпружинена тарированной пружиной 11 сжатия, на зубьях рейки 8 со стороны, обращенной к рейке 5, выполнены скругления 12. На подвижном звене 10 закреплены шунты 13, контактирующие каждый с одним из датчиков 14, установленных за рейками 8. Подвижное звено перемещается на роликах 15 в П-образных направляющих 16, расположенных в корпусе 17 манипулятора 18. Между рейками 5 и 8 имеется зазор а, равный шагу зацепления.
Привод работает следующим образом.
При включении двигателя 1 через червячный редуктор 2 шестерня 4, вращаясь, обкатывается по зубчатому звену-рейке 5 и, таким образом, происходит перемещение по- движного звена 10 на роликах 15 в П-образных направляющих 16. При перемещении подвижного звена 10 в крайнее, например, правное положение правый шунт 13 входит в датчик 14 и двигатель 1 отключается. Одновременно шестерня 4, выйдя из зацепления с рейкой 5, входит в зацепление с рейкой 8 правого тормозного механизма 7. Так как после отключения двигателя 1 его вал делает 2-3 оборота, то
5 5 0
0
П1естерня 4 проворачивается на какой-то угол, что вызвало бы линейное перемещение подвижного звена 10 на 20-25 мм. Этого не происходит вследствие того,что при остаточном провороте шестерни 4 происходит перемещение рейки 8 в направляющих 9 в перпендикулярном относительно зубчатого звена-рейки 5 направлении. Рейка 8, перемещаясь, сжимает пружину 1 1 до тех пор, пока вращение шестерни 4 не прекратится.
При включении двигателя 1 для перемещения подвижного звена 10 в обратном направлении шестерня 4 врап.аясь возвращает рейку 8 в исходное положение до упора. Шестерня 4 сходит с рейки 8, входит в зацепление с рейкой 5 и обкатывается но ней, пперемещая тем самым подвижное звено 10. Движение подвижного звена 10 прекращается, когда левый ujyHT 13 входит в датчик 14, происходит отключение двигателя 1. Одновременно Н1естерня 4, перешедшая на рейку 8 левого тормозного механизма 6, совершая остаточное вращение после отключения двигателя, перемещает рейку 8 в направляющих 9 до полного останова вала двигателя 1. Пружина И, сжимаясь при перемещении рейки 8, выполняет роль демпфера.
Применение двух тормозных механизмов, расположенных по краям зубчатого звена, увеличивает точность позиционирования привода манипулятора.
Формула изобретения
1.Привод, содержащий двигатель, зубчатое звено, шестерню, взаимодействующую с зубчатым звеном, и тормозной механизм, отличающийся тем, что, с целью повышения точности позиционирования, привод снабжен вторым тормозным механизмом, оба тормоз- рых механизма выполнены в виде направляющих, расположенных с обеих сторон зубчатого звена перпендикулярно е.му, реек, размещенных в направляющих с возможностью перемещения, и пружин, подпружинивающих рейки вдоль направляющих.
2.Привод по п. 1, отличающийся тем, что на зубьях реек со стороны, обращенной к зубчатому звену, выполнены скругле- ния.
Л-А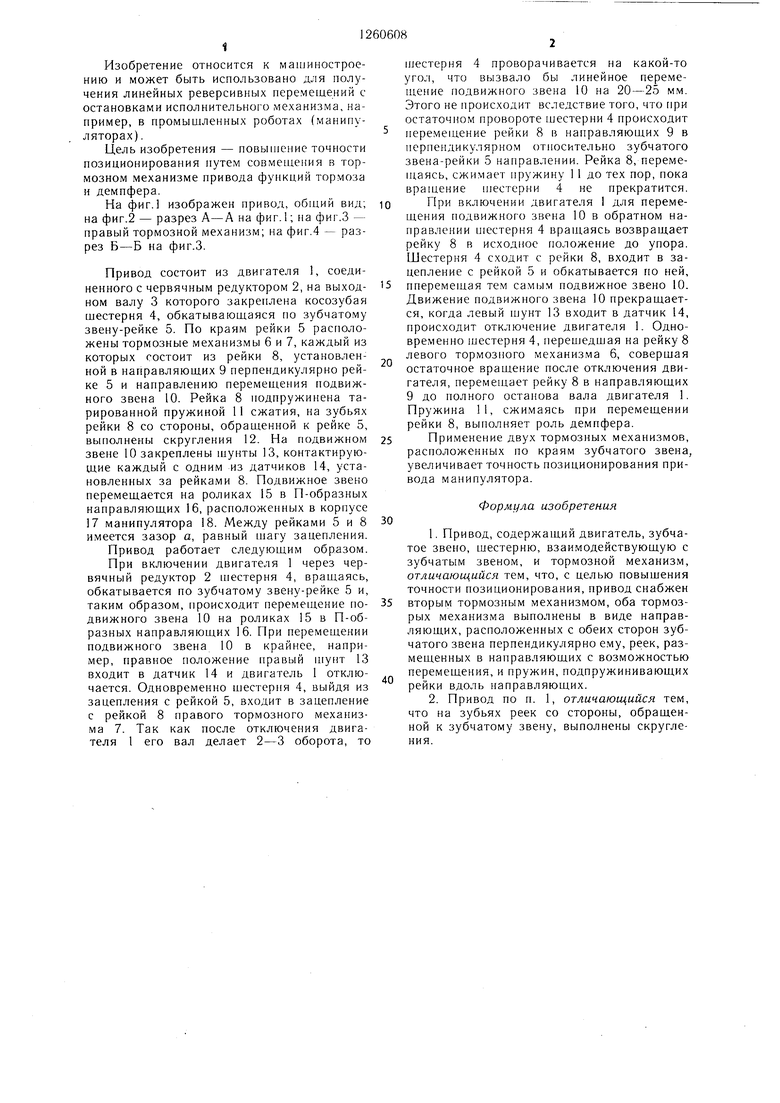
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1458204A1 |
| Телескопический механизм выдвижения рабочего органа манипулятора | 1980 |
|
SU1066802A1 |
| Привод | 1979 |
|
SU875136A1 |
| Стенд для испытания тормозов транспортного средства | 1975 |
|
SU604722A1 |
| Многошпиндельное устройство для притирки клапанов | 1983 |
|
SU1126417A1 |
| Погрузочная ковшовая машина | 1940 |
|
SU60606A1 |
| Система управления транспортного средства | 1989 |
|
SU1781099A1 |
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
| Манипулятор | 1988 |
|
SU1521580A1 |
| КРАЕОБМЕТОЧНАЯ ШВЕЙНАЯ МАШИНА | 2011 |
|
RU2493302C2 |
Изобретение относится к машиностроению и может быть использовано для получения линейных реверсивных перемещений с остановками исполнительного механизма, например, в промышленных роботах. Цель изобретения - повьппение точности позиционирования путем совмешения в тормозном механизме функций тормоза и демпфера. Привод содержит двигатель 1, зубчатое звено 5, шестерню 4, обкатывающуюся по зубчатому звену 5, и два тормозных механизма 6 и 7, каждый из которых выполнен в виде рейки, установленной в направляющих и подпружиненной цилиндрической тарированной пружиной сжатия. На зубьях рейки тормозного механизма со стороны, обращенной к зубчатому звену 5, выполнены закругления, а Б исходном состоянии зубья рейки тормозного механизма установлены относительно зубчатого звена с зазором, равным тагу зацепления. 1 з.п. ф-лы, 4 ил. (Л / N5 О5 О О5 о 00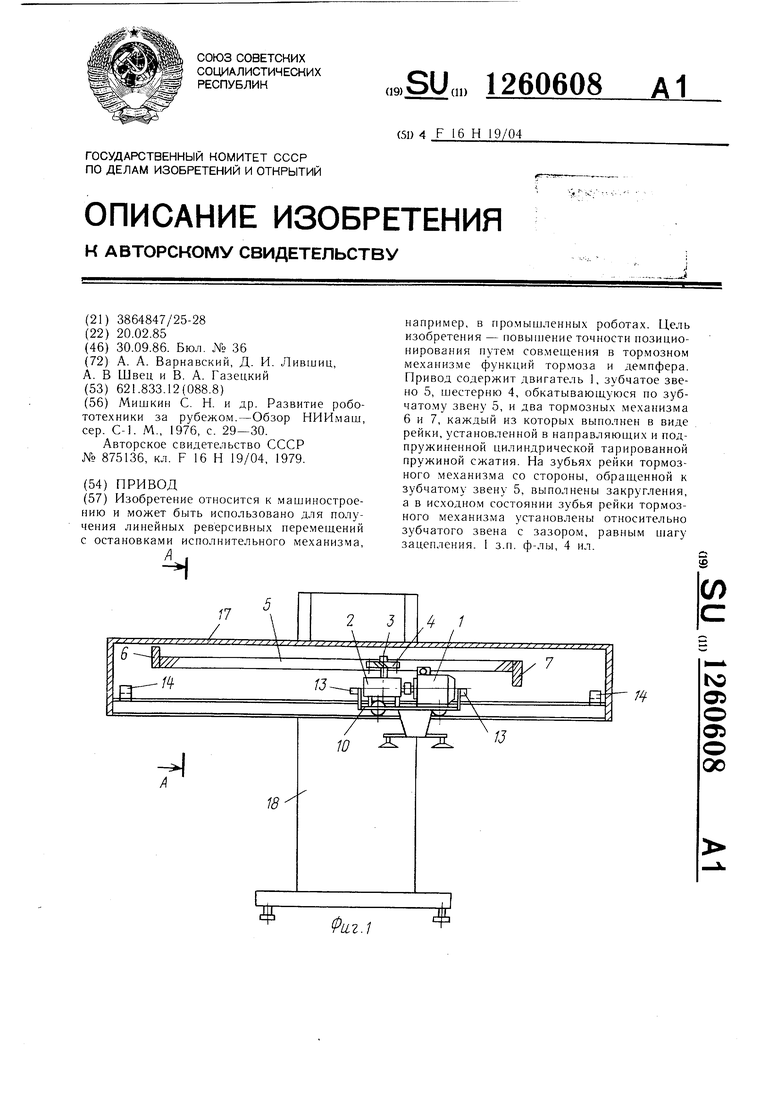
Б-5
У/////////////////У//////////7///////
ч
. I I
8
ц
Vuz.if
фиг. 3
Составитель С. Андреев
Редактор М. Недолуженко Техред И. ВересКорректор И. Эрдейи
Заказ 5209/32Тираж 880Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5
Филиал ППП «Патент, г. Ужгород, ул. Проектная, 4
фиг. 3
-J
| Мишкин С | |||
| Н | |||
| и др | |||
| Развитие робототехники за рубежом.-Обзор НИИмаш, сер | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| М., 1976, с | |||
| Солесос | 1922 |
|
SU29A1 |
| Привод | 1979 |
|
SU875136A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
