Изобретение относится к машиностроению и может быть использовано в робототехнике, в частности в приводах поворота цикловых манипуляторов.
Целью изобретения является улучшение динамических характеристик привода.
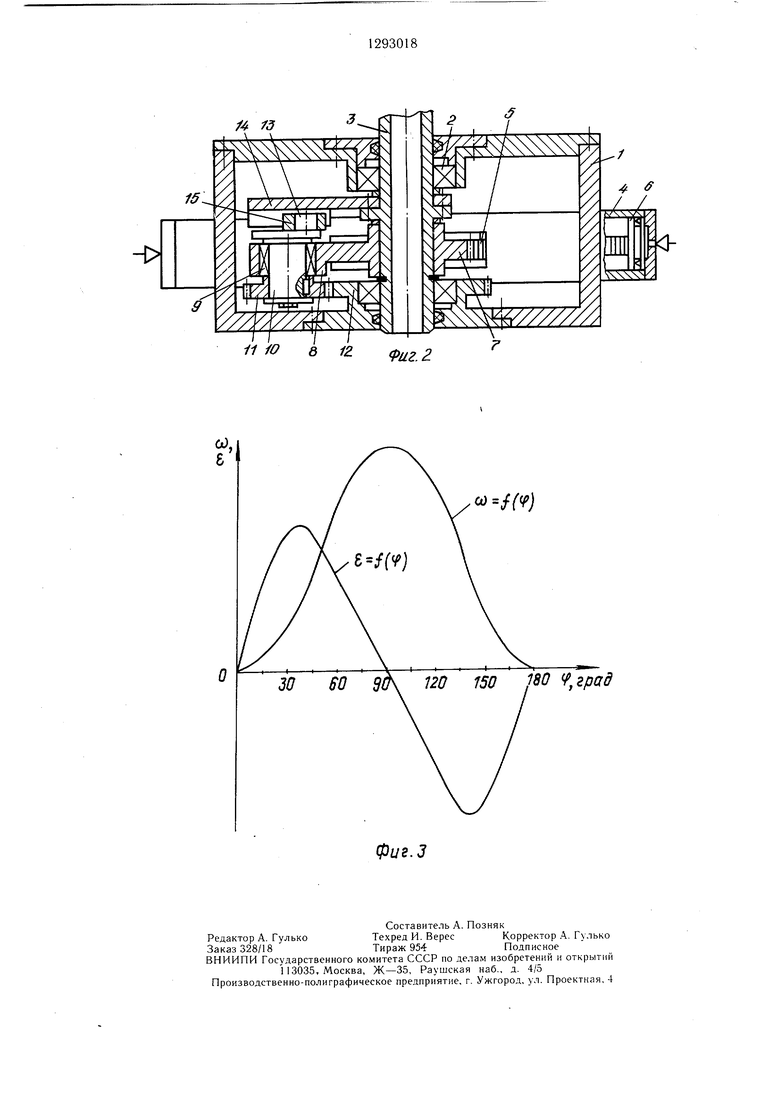
На фиг. 1 изображена кинематическая схема привода манипулятора; на фиг. 2 - то же, поперечный разрез; на фиг. 3 - графики скорости « f(t) и ускорений 6 f(f) ведомого вала привода манипуля- Ю тора.
Привод манипулятора состоит из корпуса 1, в котором на подшипниках 2 установлен ведомый вал 3. Силовой цилиндр 4 крепится к корпусу 1 и выполнен по двух- , поршневой схеме со штоком-рейкой 5 между поршнями 6. Шток-рейка 5 входит в зацепление с ведущим зубчатым колесом 7, выполненным за одно целое с водилом 8 и установленным на ведомом валу 3 с воз- е - ся С г f)
Т f - arctg й + 1-e-t:o5(J|,.y
где -угол поворота водила 8;
- угол поворота рычага 14 (и соответственно ведомого вала 3);
е - эксцентриситет расположения оси пальца 13 от оси 10;
t - радиус зубчатого колеса 11;
R -радиус зубчатого колеса 12.
На фиг. 3 изображены графики скорости и ускорения ведомого вала 3 в зависимости от изменения угла f при следуюших соотношениях: R 2г, е 0,5г, т. е. когда выходной вал привода поворачивается на 180°.
В результате получаем, плавное изменение скорости ведомого- вала 3. При этом в крайних точках скорость и ускорение равны нулю, а перемещение осуществляется по закону, близкому к синусоидальному, что обеспечивает безударную работу привода маможностью поворота относительно него. 20 нипулятора. Кроме того, привод является
В водиле 8 на подшипниках 9 расположена ось 10 кривошипа. На оси 10 жестко сидит зубчатое колесо 11, которое входит в зацепление с зубчатым колесом 12 (в данном
кинематически необратимым, что исключает влияние инерции приводимых в движение звеньев манипулятора на движение поршней 6 силового цилиндра 4. Для обратного
случае выполненным за одно целое с крыш- 25 хода привода давление подается в левую
кой), неподвижно соединенным с корпусом 1 соосно ведомому валу 3. Передаточное отношение между зубчатым колесом 11 и зубчатым колесом 12 равно отношению 2 У к необходимому углу поворота ведомого вала 3. На оси 10 выполнен эксцентриковый 30 палец 13, который взаимодействует с пазом рычага 14 посредством ползушки 15. Сам рычаг 14 жестко соединен с ведомым валом 3. В крайних положениях привода манипулятора или в крайних положениях поршней 6 силового цилиндра 4 палец 13 нахо- 35 дится на минимальном расстоянии от оси ведомого вала 3.
Привод манипулятора работает следую- шим образом.
Давление подается в правую полость до силового цилцндра 4 (например, пневматического). Поршень 6 начинает перемещаться, толкая шток-рейку 5. Последняя, взаимодействуя с ведушей шестерней, начинает поворачивать водило 8, вследствие этого зубчатое колесо 11 начинает обкатываться по неподвижному зубчатому колесу 12. Ось 10 начинает вращаться. В относительном движении палец 13 начинает описывать эпициклоиду, увлекая за собой рычаг 14. Ползушка 15 при этом перемещается по пазу рычага 14. Функция изменения угла поворота рычага 14 от угла поворота водила 8 выражается формулой
45
50
полость силового цилиндра 4.
Применение предлагаемого привода манипулятора позволяет получить на основе пневматического привода плавное безударное изменение скорости ведомого вала, использовать маломощный приводной цилиндр. Закон изменения скорости вращения выходного вала определяется соотнощением эксцентриситета е и радиуса г шестерни-сателлита.1
Формула изобретения
Привод манипулятора, содержаший корпус с установленным в нем выходным ведомым валом и силовым цилиндром, на штоке которого выполнена рейка, входящая в зацепление с ведущим зубчатым колесом, а также цилиндрическую зубчатую передачу, отличающийся тем, что, с целью улучшения динамических характеристик, он снабжен кривошипно-кулисным механизмом, кривошип которого имеет эксцентриковый палец и связан с первым зубчатым колесом указанной зубчатой передачи, причем ведушее зубчатое колесо установлено на ведомом валу с возможностью поворота относительно его оси и жестко соединено с дополнительно введенным водилом, во втулке которого установлена ось кривошипа, а второе зубчатое колесо закреплено в корпусе.
- е - ся С г f)
Т f - arctg й + 1-e-t:o5(J|,.y
где -угол поворота водила 8;
- угол поворота рычага 14 (и соответственно ведомого вала 3);
е - эксцентриситет расположения оси пальца 13 от оси 10;
t - радиус зубчатого колеса 11;
R -радиус зубчатого колеса 12.
На фиг. 3 изображены графики скорости и ускорения ведомого вала 3 в зависимости от изменения угла f при следуюших соотношениях: R 2г, е 0,5г, т. е. когда выходной вал привода поворачивается на 180°.
В результате получаем, плавное изменение скорости ведомого- вала 3. При этом в крайних точках скорость и ускорение равны нулю, а перемещение осуществляется по закону, близкому к синусоидальному, что обеспечивает безударную работу привода ма нипулятора. Кроме того, привод является
кинематически необратимым, что исключает влияние инерции приводимых в движение звеньев манипулятора на движение поршней 6 силового цилиндра 4. Для обратного
хода привода давление подается в левую
полость силового цилиндра 4.
Применение предлагаемого привода манипулятора позволяет получить на основе пневматического привода плавное безударное изменение скорости ведомого вала, использовать маломощный приводной цилиндр. Закон изменения скорости вращения выходного вала определяется соотнощением эксцентриситета е и радиуса г шестерни-сателлита.1
Формула изобретения
Привод манипулятора, содержаший корпус с установленным в нем выходным ведомым валом и силовым цилиндром, на штоке которого выполнена рейка, входящая в зацепление с ведущим зубчатым колесом, а также цилиндрическую зубчатую передачу, отличающийся тем, что, с целью улучшения динамических характеристик, он снабжен кривошипно-кулисным механизмом, кривошип которого имеет эксцентриковый палец и связан с первым зубчатым колесом указанной зубчатой передачи, причем ведушее зубчатое колесо установлено на ведомом валу с возможностью поворота относительно его оси и жестко соединено с дополнительно введенным водилом, во втулке которого установлена ось кривошипа, а второе зубчатое колесо закреплено в корпусе.
/ /J
// fO
Фиг. 2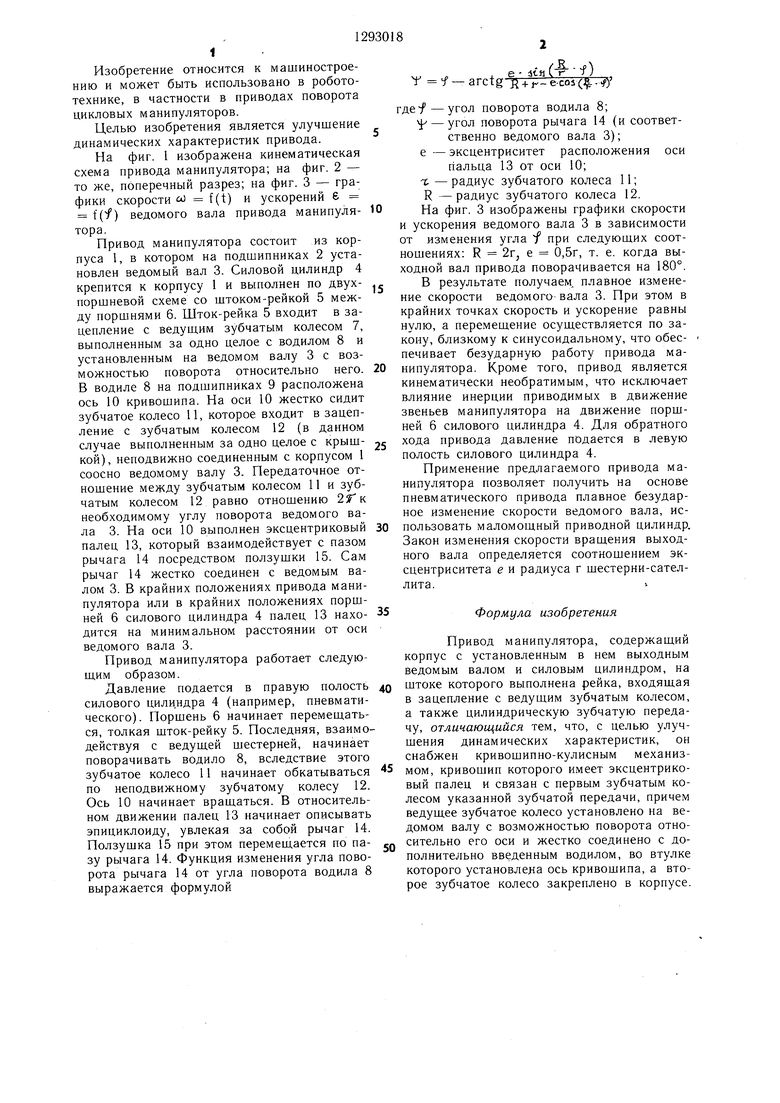
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД РЕМИЗНЫХ РАМ РЕМИЗОПОДЪЕМНОЙ КАРЕТКИ | 2000 |
|
RU2167964C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ЗАЧИСТКИ ПОВЕРХНОСТЕЙ | 1991 |
|
RU2024334C1 |
| ПРЕОБРАЗОВАТЕЛЬ КРУТЯЩЕГО МОМЕНТА | 1992 |
|
RU2049284C1 |
| РЕГУЛИРУЕМОЕ УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В КОЛЕБАТЕЛЬНОЕ | 2005 |
|
RU2307271C1 |
| Устройство для выравнивания скорости ножей летучих ножниц | 1980 |
|
SU975256A1 |
| Поворотное устройство | 1985 |
|
SU1293429A1 |
| МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ДВИЖЕНИЯ | 1995 |
|
RU2102642C1 |
| КРИВОШИП С ПЕРЕМЕННЫМ РАДИУСОМ | 2000 |
|
RU2185897C2 |
| ПРИВОД КОЛЕСА ВЕЛОСИПЕДА | 2015 |
|
RU2622734C2 |
| Механизм поворота | 1978 |
|
SU751578A1 |
Изобретение относится к машиностроению и может быть использовано в робототехнике, в частности в приводах поворота цикловых манипуляторов. Целью изобретения является улучшение динамических характеристик привода. Давление подается в правую полость силового цилиндра 4 (например, пневматического). Поршень 6 начинает перемещаться, толкая П1ток-рейку 5. Она, взаимодействуя с ведущей шестерней 7, начинает поворачивать водило 8, вследствие этого зубчатое колесо 11 начинает обкатываться по неподвижному зубчатому колесу 12. Ось 10 начинает вращаться. В относительном движении палец 13 начинает описывать эпициклоиду, увлекая за собой рычаг 14 и поворачивая соответственно ведомый вал 3; В результате получается плавное изменение скорости ведомого вала 3. При этом в крайних точках скорость и ускорение равны нулю, а перемещение осуществляется по закону, близкому к синусоидальному, что обеспечивает безударную работу привода манипулятора. 3 ил. 11 (Л со со 00 Фиг. f
О) )
,2flaff
Составитель А. Позняк
Редактор А. ГулькоТехред И. ВересКорректор А. Гулько
Заказ 328/18Тираж 954Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Фиг.З
| Привод манипулятора | 1980 |
|
SU961938A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
