(54) СХВАТ РОБОТА
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват робота | 1982 |
|
SU1024271A1 |
| Захватное устройство | 1989 |
|
SU1660955A1 |
| Схват | 1987 |
|
SU1511114A1 |
| Схват манипулятора | 1982 |
|
SU1076278A1 |
| Схват | 1977 |
|
SU659377A1 |
| Схват | 1983 |
|
SU1138313A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Сборочная резьбозавертывающая головка | 1980 |
|
SU921756A1 |
Изобретение относится к области машиностроения,.преимущественно к Л промьшшенньм работам и манипуляторам, предназначеннБМ для автоматизации технологических процессов производства деталей типа тел вращения, шиеюцих базовые отверстия различной конфигураций.
Известен схват, содержащий привод, корпус с эакрепленвкаик в нем подпружиненными рьтаагголи с захват- ньми гуШсами. В корпусе выполнен паз, в котором установлен с возможностью его горизонтёшького пер лещения клин. Данная крйструкция осуществляет захват детали, вертикальная ось симметрии которой не совпадает с осью симметрии захвата С11Недостатке известной конструкции охвата является то,что в месте выгрузки деталь оказывается также со смещенной вертика7п иой осью, что зачастую нарушает техиологичес ий цикл. Кроме того, если деталь имеё-Г дополнительно отверстие для базирования по нему в месте выгрузки, то отклонение осей симметрии отверстия от осей симметрии схвата приведет еще и к развороту детали относительно .вертикальной оси, что значительно
сужает технологические возможности указанного схвата.
Целью изобретения является расширение технологических возможностей путем обеспечения захвата деталей по их базовому отверстию.
Это достигается тем, что схват снабжен механизмом ориентации, наконечником, подпружиненньзм относительно штока стаканом и гильзой, причем механизм ориентации выполнен в виде пружины кручения, обгонной муфты и муфты предельного крутящего мсялента, установленных на гильзе, внутри которой расположен шток, при зтам наконечник смонтирован на стакане, внутри которого установлен клин.
Кроме того, наконечник вштолнён съемным, а полумуфта обгонной муфты и полумуфта муфты предельного крутящего момента жестко связаны между собой.
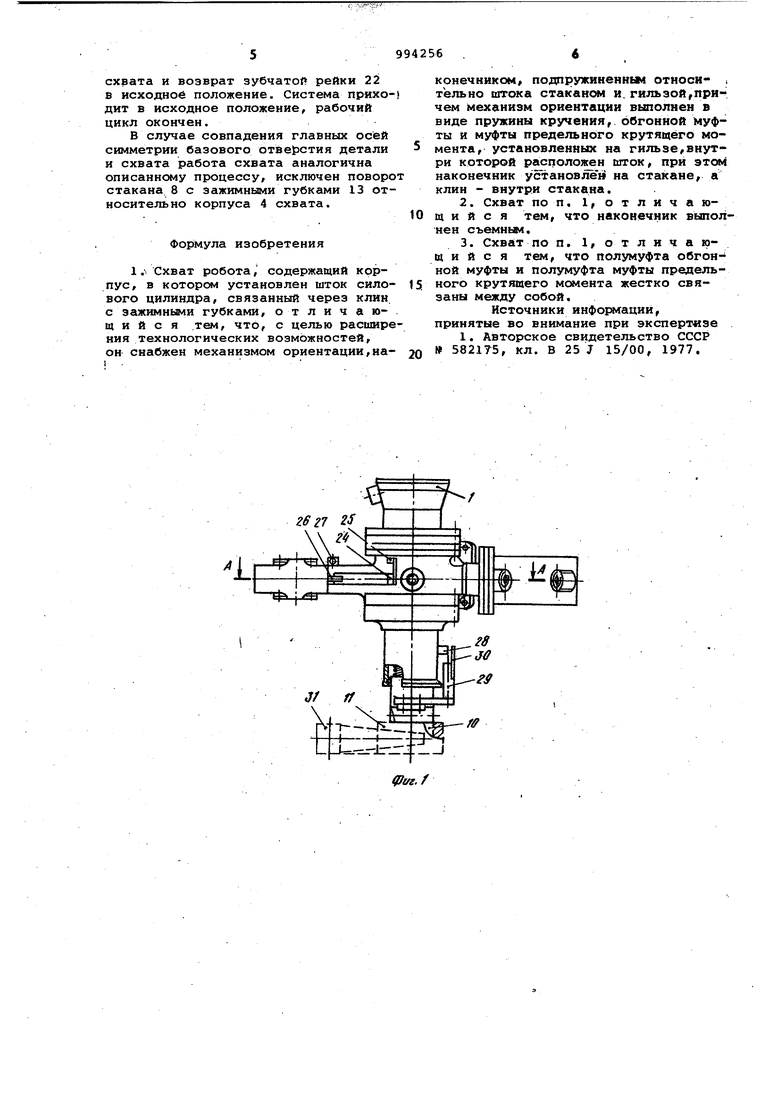
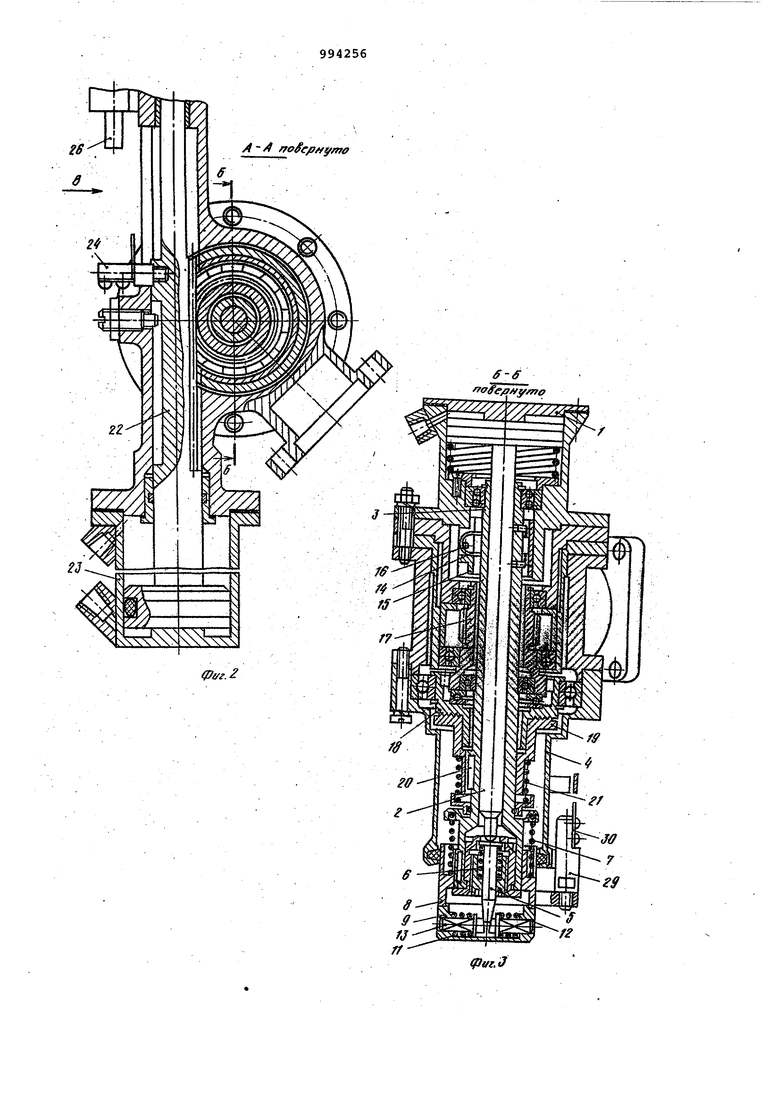
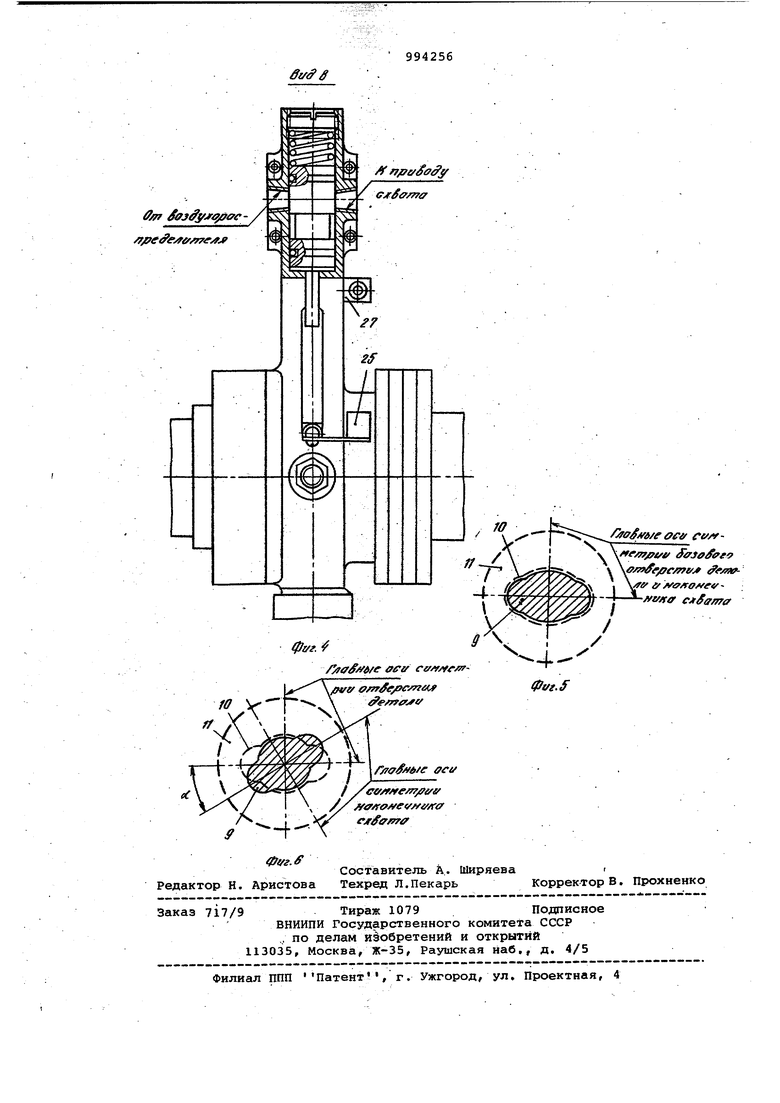
На фиг.1 изображен общий вид схва-та; на фиг.2 - разрез А-А на фиг.1 на фиг.3 - разрез Б-Б на фиг.2; на , фиг.4 - вид В на фиг.2; на,фиг.5 расположения зажимной части схвата по отношению к базовому отверстию зажимаемой дет.али при точHoiA их совпадении; на фиг. б - то же при наличии угла рассогласования.
Схват содержит привод 1, шток 2 которого перемещается внутриполой гильзы 3, установленной в корпусе 4, и взаимодействует с клином 5, подпружиненнвм пружиной б относительно штока 2. В нижней части корпуса 4 установлен подпружиненный пружиной 7 стакан 8, на которсм смонтирован сменный наконечник 9, конфигурация рабочей части которого соответствует конфигурации базового отверстия 10 зажимае1у1ой детали II, В наконечнике
9выполнены радиальные прорези 12,
в которых переминаются подпружиненные зажимные губки 13, внутренние торцы которых имеют клиновые поверхности, взаимодействующие с силовьлм клином 5.
Схват снабжен механизмом ориентации, включающим в себя кручения 14, установленную в пазу втулки 15 и зафиксированную относительно корпуса 4 пружиной 16, обгонную муфту, верхняя полумуфта 17 которой выполнена в виде зубчатой шестерни, а нижняя полумуфта 18 является верхней полумуфтой муфты предельного момента, при этом нижняя полумуфта 19 посредством шпонки 0 связана с гильзой 3 и подпружинена пружиной 21, Обгонная муфта приводится во вращение зубчатойрейкой 22, которая установлена на штоке пневмоцилиндра 23. Для управления ходом зубчатая рейка 22 снабжена упором 24 и флажком25, взаимодействующими соответственно с золотником 26 и бесконтактным датчиком 27.
В нижней частикорпуса 4 расположен бесконтактный датчик 28, а на упоре 29, жестко связанном со стаканом 8,- флажок 30, предназначенные для управления переносом зажатой схватом детали. Перед началом цикла деталь должна быть установлена в механизме фиксации 31.
В процессе работы схвата робота возможны 2 варианта: первый - при точном совпадении базового отверстия
10детали 11 и наконечника 9 схвата
с зажимными губками (фиг.5) и второй при наличии угла d рассогласования между главными осями- симметрии базового отверстия и наконечника схвата (фиг.б) .
Рассмотрим второй вариант работы схвата робота.
Цикл начинается, командами на механизм фиксации 31, где осуществляется предварительный зажим детали 11, и на опускание руки робота со схватом до соприкосновения торца наконечника 9 с деталью 11. Поскольку оси силометрии базового отверстия 10 и наконечника 9 не совпадают, то дальнейшее перемещение руки схвата
на величину Н , необходимую для последующего захвата детали зажимными губками, вызывает перемещение стакана относительно корпуса 4 и сжатие пружины 7 на ту же величину Н . Далее поступает команда на пуск сжатого воздуха через отверстия в поршневую полость пневмоцнлиндра 23. Шток последнего перемещает зубчатую .рейку 22, возвратно-поступательное движение которой преобразуется во вращательное наконечника 9 последовательно через шестерню-полумуфту 17 обгонной муфты, полумуфты 18 и 19, муфты предельного крутящего момента, гильзу 3, стакан 8..
Механизм ориентации передает вращение стакана 8 до его совмещения с базовым отверстием детали, после чего под действием сжатой пружины 7 стакан 8 входит в указанное отверстие на глубину Н . Так как момент трения между деталью и наконечником превышает момент на валу шестерниполумуфты 17, то происходит срабатывание муфты предельного крутящего момента и прекращение вращения ее нижней полумуфты 19, гильзы 3 и стакана 8.
При дальнейшем .передвижении зубчатой рейки 22 ее упор 24 доходит до золотника 26 и начинает его перемещать , последний в свою очередь открывает доступ сжатого воздуха из воздухораспределителя в поршневую полость привода схвата. Шток 2 перемещает силовой клин 5, который своей силовой частью раздвигает клиновые зажимные-губки, зажимающие деталь по базовому отверстию. В этот момент флажок 25, укрепленный на зубчатой рейке 22, закрывает бесконтактный датчик 27 и при его срабатывании из системы управления поступает команда на разжим механизма фиксации 31 и на подъем схвата вместе с зажатой в нем деталью.
Так как стакан 8 с наконечником 9 остаются развернутыми на угол о относительно исходного положения, то необходимый возврат их осуществляется механизмом ориентации. При повороте гильзы 3 на угол cL на тот же угол закручивается и пружина кручения 14 механизма ориентации. Поэтс 1у после подъема схвата обгонная полумуфта 17 под действием заведенной пружины кручения 14 возвращается в исходное положение относительно корпуса 4 схвата. При этом развороте флажок 30, установленный на упоре 29 стакана 8, перекрывает датчик 28, при срабатывании которого подается команда на перенос зажатой детали в зону ее дальнейшей обработки или в приемный бункер. После выполнения указанной операции осуществляется сброс сжатого воздуха из привода 1 схвата и возврат зубчатой рейки 22 в исходное положение. Система приходит в исходное положение, рабочий цикл окончен. В случае совпадения главных осей симметрии базового отверстия детали и схвата работа схвата аналогична описанному процессу, исключен поворо стакана 8 с зажимными губками 13 относительно корпуса 4 схвата. Формула изобретения 1 . Схват робота, содержащий корпус, в котором установлен шток силового цилиндра, связанный через клин, с зажимными губками, отличающийся тем, что, с целью расишре ния технологических возможностей, он снабжен механизмом ориентации,накрнечником, подпружиненнЕМ относи тельно штока стаканом и. гильзой,причем Мехаиизм ориентации выполнен в виде пружины кручения, обгонной Муфты и муфты предельного крутящего момента, установленных на гильзе,внутри которой расположен шток, при этом наконечник установлен на стакане, а клин - внутри стакана. 2.Схват по п, 1, отличающийся тем, что наконечник выполнен съемным. 3.Схват по п. 1, о т л и ч а ющ и и с я feni, что полумуфта обгонной муфты и полумуфта муфты предельного крутящего мсялента жестко связаны между собой. Источники инфосялации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР 582175, кл. В 25 J 15/00, 1977.
А ffofeflff ma
