(54) БАЛАНСИРУЮЩЕЕ УСТРОЙСТВО МНОГОДВИГАТЕЛЬНОГО.. ЭЛЕКТРОПРИВОДА
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления многодвигательным электроприводом | 1984 |
|
SU1252900A1 |
| Многодвигательный электропривод | 1983 |
|
SU1280690A1 |
| Способ параметрического управления асинхронным короткозамкнутым электродвигателем с вентиляторной нагрузкой и устройство для его осуществления | 1989 |
|
SU1697250A1 |
| УСТРОЙСТВО СВЯЗИ | 1997 |
|
RU2116700C1 |
| Многодвигательный электропривод переменного тока | 1985 |
|
SU1307521A1 |
| Вентильный электропривод | 1989 |
|
SU1758822A1 |
| Многодвигательный электропривод | 1978 |
|
SU974541A2 |
| Устройство дистанционного зондирования подповерхностных слоев почвы | 1989 |
|
SU1684770A1 |
| Устройство для выбора необходимой ступени коробки передач транспортного средства | 1990 |
|
SU1794703A1 |
| Вентильный электродвигатель | 1989 |
|
SU1654915A1 |
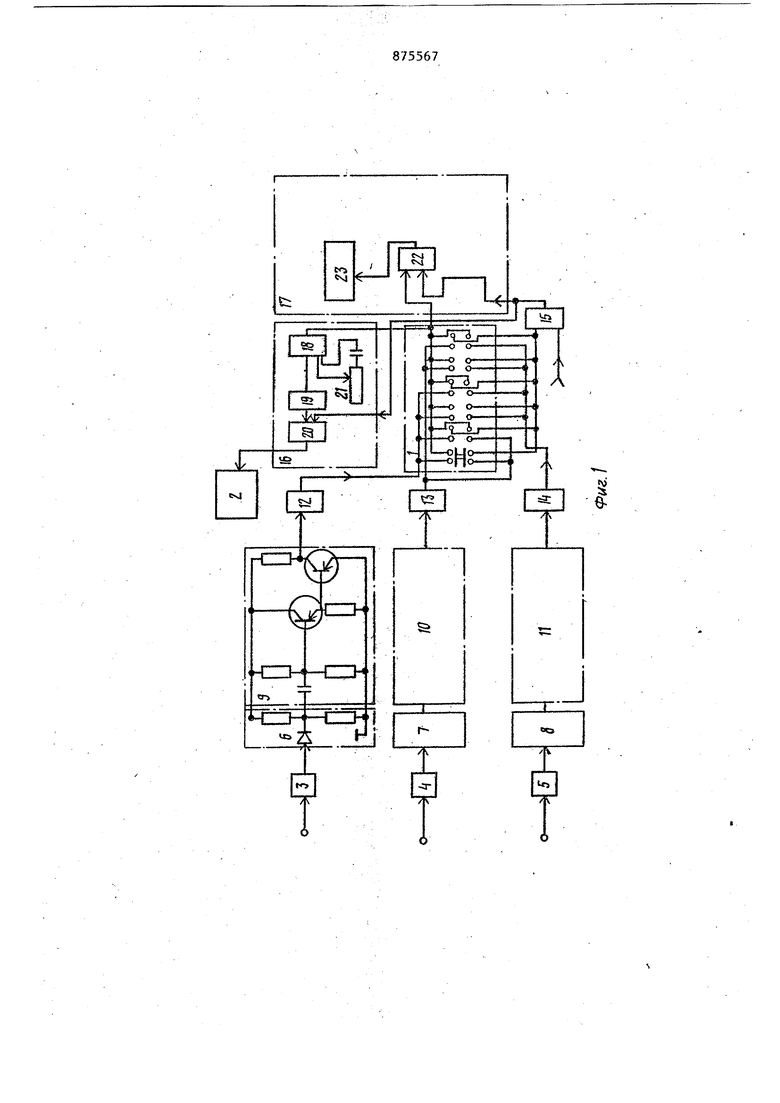


Изобретение относится к электротехнике и может быть использовано для сдвига фазы вращения валов многодвигательного электропривода с син ронными двигателями. Известен преобразователь фазовр.го сдвига в угловые перемещения вала, в котором вал исполнительного двигателя связан с ротором вращающегося трансформатора через редуктор, а фазовый сдвиг на входе преобразова теля компенсируется фазовращателем, фазовый сдвиг которого пропорционален углу поворота вала 1 |. Недостатком этого устройства яв-т ляется наличие кинематической контактной связи между валом двигателя и ротором фазовращателя, которая Усложняет преобразователь и со временем вносит значительные погрешности в показания преобразователя. Наиболее близким техническим рещеиием к предлагаемому является устройство, содержащее коммутатор и логический блок с исполниуельными . элементами L2., Недостатками этого устройства являются сложность и пониженная надежность . вызванные тем, что угловые положения вращающихся роторов синхронных двигателей определяются сигналами от датчиков yi-ловых перемещений, которые требуют кинематической связи (контакта) с валом двигателя, а заданный угол между вращающимися валами (роторами ) устанавливается при помощи сельсина-фазовращателя и фиксируется релейным элементом, v включенным в диагональ моста, срабатывающим при суммарном напряжении сигналов датчиков близким к нулю. Фазовращатели и датчики угловых перемещений являются дорогостоящими. Кроме того. Датчики угловых перемещений сочленяются с валами приводными устройствами, которые практически невозможно изготовить без люфтов. 3. К тому же; со временем люфты увеличиваютсй от механического износа дет лей. Это вносит значительные погрешности в электрические сигналы, снимаемые с-датчиковi что снижает точность получения заданного угла. Кром того, во многих случаях механизмы, с которыми сочленяются датчики, находятся во взрывоопасных средах.что определяет необходимость специгшьного исполнения конструкции датчиков Цель изобретения - повышение наде ности балансировки..и упрощение устройства. Поставленная цель достигается тем что в него дополнительно введены дет торы, ограничители, преобразователи сигналов, формирователи импульсов-, элемент И, блок задершси и формирования стробирующих импульсов, выход которого подключен к входу логичес кого блока с исполнительными элементами, первый вход - к первому выходу коммутатора, второй вход - к выходу элемента И, один вход которого подключен ко второму выходу ко ч5мутатора, второй вход является управляющим входом балансирующего устройства, каждый вход коммутатора подклю чен через последовательно соединенны формирователь импульсов, преобразова тель cигнaJ;JOB и ограничитель к детек тору, входы детекторов являются вход ми балансирующего устройства. На фиг. 1 представлена функционал ная схема б ансирующего устройства Грехдвигательного электропривода , на фиг. 2(с(,б, осциллограмг така 1 статора,. сигнала датчика угпСияьтх. пер мещений, сигнала сейсмодатчика, уста новленного на фундаменте агрегата со ответственно, на фиг. 3(а,(5,-6} оси иляограммы напряжений на элементах схемы балансирующего устройства, на входе детекторов (а ) на выходе детекторов (iS) , на выходе ограничителей (б), на входе преобразователей(г) и на выходе формирователей импульсов (б). Балансирующее устройство многодвигательного электропривода содержит KONB TaTop , логический блок 2 с исполнительньми элементами, детекторы 3-5, подключенные входами кадцый ко вторичной обмотке своего трансформатора тока, а выходами посредством последовательно соединенных ограничителей 6-8 и преобразователей 9-11 импульсов, ко входу фор7мирователей J2-14 стандартных импульсов соответственно, при этом выходы формирователей подключены к входным контактам коммутатора 1, элемент И 15, соединенный одним входом со вторым выходом коммутатора 1, другим входом - с шиной сигналов контроля разгона ротора запускаемого двигателя, блок 16 зад-ержки и формирования стробирующих импульсов, подключенный первым входом к первому выходу коммутатора 1, вторым входом - к выходу элемента И 15, а выходом к логическому блоку 2 с исполнительными элементами, блок 17 индикации, подключенный первым входом к первому выходу коммутатора 1, вторым входом - к выходу элемента И 15, блок 16 задержки и формирования стробирук1щнх импульсов, содержащий одновибратор 18, подключенный входом к первому выходу коммутатора 1, формирователь 19, подключенный входом к выходу одновибратора 18, элемент И 20, подключенный одним входом к вькоду формирователя 19, другим входом - к выходу элемента И 15, а выходом - ко входу логического блока 2, регулятор 21 временной задержки, состоящий из переменного резистора и емкости, включенный в цепь управления одновибратора 18, блок I7 индикации, содержащий триггер 22, подключенный единичным входом к первому выходу коммутатора 1, нулевым входом - к выходу элемента И 15, . индикатор 23, подключенный входом к выходу триггера 22, Ток XCT пульсаций тока статора (фиг. 2ct), снимаемый do вторичной обмотки трансформатора тока, состоит из огибаюш гх и несущей частот (несущая частота - частЬта питающей йети). Частота огибающих токов Х у равна частоте сигналов, снимаемых с выхода датчиков угловых перемещений (фиг, 2Д), при этом изменение фазы .огибающих (фиг, ) пропорционально изменению фазы сигнала да тчика угловых перемещений и изменению фазы перемещения фундамента (фиг, 2/, - Балансирующее устройство многодвигательного электропривода работает следующим образом. Предположим, требуется произвести пуск второго двигателя со сдвигом пространственного угла вращения его ротора в син гронном режиме на 180 относительно вращения ротора в синхронном режиме первого двигателя или произвести корректировку на такой же угол второго относительно пер вого, уже работающего в синхронном режиме, двигателя. Для этого регулятор временной задержки 21 устанавливается в положение 180, а коммутатор 1 переводится в положение 1, На втором входе элемента И 15 задан запрещающий уровень. Детекторы 3 и 4, подключенные нхо дами ко вторичным обмоткам своих трансформаторов тока, в токах . в деляют по одной огибающей (фиг. 3,6 которые передаются на входы ограничителей 6 и 7 соответственно. С выхода ограничителей огибающие, огранич.енные на уровне, превьппающем полупериод (фиг.- 3;б), подаются на входы своих преобразователей 9 и 10, ко торые преобразуют их в импiгльcьJ тра. пецеидальной формы ( фиг. .). Посред ством формирователей 12 и 13, например . по заднему фронту, из трапецеидальных импульсов формируются стандартные импульсы (фиг. 3.передаваемые в коммутатор 1. В синхронном реяшме работы двйгателя, принятого за опоргшй, длительность периода Т одного цикла изменения сигнала (период огибающей) - величина постоянная. Следовательно, на выходе преобразователя 9 возникают с постояйивей частотой следовани и постоянной длительностью трапецеидальные импул11 сы, сформированные так, что одно из оснований импульса равно длительности полупериодаТ}2 пряжения огибающей. Формирователь . 2 по заднему фронту трапецеидальных импульсов формирует импульсы определенной амплитуды и длительности, сле дующие с интервалом времени между импульсами равным одному обороту вала, вращающегося с синхронной скоростью. Через контакты коммутатора i, с первого выхода, стандартные импульсы формирователя опорного двигателя пер даются в схему 16 задержки и формирования стробирующих импульсов-:на вход элемента 38 задержки, время задержки которого можно регулировать регулятором 2J временной задержки (цепочка RC) в пределах 0- t с, где п -.синхронное число оборотов вала в минуту. Шкала регулятора временной задержки проградуирована s гр дусах. Перевод временной задержки стандартного импульса опорного двигателя, измеряемой в секундах,, в градусы заданного угла сдвига фаз осуществляется по формуле i gi J- , . где tf - заданный угол. Задним фронтом задержанного импульса запускается формирователь 19 стробирующих импульсов. Длительность стробирующего импульса рассчитывается по формуле с , где Т - время одного оборота. Стробирующие импульсы передаются на Один из входов элемента И 20. В асинхронном режиме работа, запускаемого двигателя каждый цикл изменения сигнала (период огибающей положения вала преобразуется в кратковремент 1е импульсы аналогично, так и в опорном. На подсинхронной скорости с шины сигналов контроля разгона ротора запускаемого двигателя задается уровень разрешение на втором входе элемента И 15. Ротор запускаемого двигателя медленно скользит относительно синхронно вращающегося магнитного поля статора, а начальная фаза каждого цикла огибающей сигнала, снимаемого со вторичной обмотки трансформатора тока запускаемого двигателя, медленно изменяется относительно начальной фазы огибающей такого же сигнала опорного двигате- . ля. Соответственно изменяется временной интервал стандартных импульсов на соответствующем входе элемента И 20, блока 16 задержки и формирования стробирующих импульсов, действующих с выхода формирователя 13 через контакты второго выхода коммутатора и элемента И 15. В момент совпадения стандартного и стробирующего импульсов элемент И 20 выдает сигнал, который вызывает срабатыванир исполнительных элементов логического блока 2 ввода запускаемого двигателя в синхронизм с сетью в заданном полюсном делении, т,е. с заданным углом сдвига фазы вращения вала запускаемого двигателя по отношению к вращению вала опорного двигателя, В случае, если заданный угол сдвиа фаз вращения валов выполняется етодом корректировки угла, смещеним синхронно вращающегося ротора с олюса на полюс путем изменения полярости напряжения, как и в первом случае, выбирается опорный двигатель а регулятором 21 временной задержки устанавливается требуемый угол. С шины сигналов контроля разгона задается потенциал разрешение на одном из входов элемента И 15. Переключение полярности напряжения возбуждения в обмотке ротора двигателя прекращается в момент совпадения стр бирующего импульса, действующего на одном из входов элемента И 20, со стандартным, действующим на втором входе этого элемента, постуйающим с выхода элемента И 15. С помощью коммутатора 1 осуществляется коммутация в шести парных комбинациях двигателей (1-2, 2-1, 2-3, 3-1, 1-3, 3-2). Блок 17 индикации позволяет опре делить угол во всех шести комбинациях. Каждый стандартнь1Й импульс фо мирователя опорного двигателя с вых да коммутатора 1 устанавливает триг гер 22 блока 17 индикации в состояние логической 1, и на выходе , триггера 22 появляется уровень раз pemeirae, а импульс с выхода элемента И 15 устанавливает триггер в состояние логического нуля, что с ответствует запрещающему уровн1о. Балансирующее устройство повьппае надежность и точность балансировки многодвигательного электропривода. 7 8 Формула изобретения Балансирующее устройство многодвигательного электропривода, содержащее .коммутатор и логический блок с исполнительными элементами, отличающееся тем, что, с целью повышения надежности балансировки и упрощения устройства, в него дополнительно введены детекторы, ограничители, преобразователи сигналов, формирователи импульсов, элемент И, блок задержки и формирования стробирующих импульсов, выход которого подключен к входу логического блока с исполнительными элементами, первый вход - к первому выходу коммутатора, второй его вход - к выходу элемента И, один вход которого подключен ко BtopoMy выходу коммутатора, а вход образует управляющий вход балансирующего устройства, казвдый вход коммутатора подключен через последовательно соединенные формирователь импульсрв, преобразователь сигналов и ограничитель к детектору, входы детекторов образуют входы балансирующего устройства. Источники информации принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 547635, кл. G 01 D 5 (24; 1977. 2.Авторское свидетельство СССР №403004, кп. Н 02 Р 5/52, 1969.
/
t;2
/л
1
.J
fOta
I
/i
Л
ФмгЛ
